1.本发明涉及车辆控制技术领域,特别涉及车轮回正提醒方法、回正提醒系统及车辆。
背景技术:
2.随着经济社会的快速发展,中国汽车的保有量越来越高。在人们日常用车的过程中,经常会由于在上一次停车熄火后车轮未回正,再次上车启动后,由于未察觉到车轮方向未回正直接加速,导致车辆驾驶侧向行驶从而撞上障碍物。
3.例如在某些加速场景或立体车库或窄小车库中,用户在未意识到车辆车轮未回正的情况下启动车辆,驶出过程中发现车辆行驶方向违背了自己的正常意图,往往会带来驾驶的慌乱感和紧张感,甚至会造成车辆剐蹭、碰撞事故的发生。
技术实现要素:
4.有鉴于此,本发明旨在提出一种车轮回正提醒方法、回正提醒系统及车辆,以解决用户在用车时未注意到车轮未回正而造成的碰撞剐蹭问题。为达到上述目的,本发明的技术方案是这样实现的:
5.一种车轮回正提醒方法,所述方法包括:
6.在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息;
7.检测驾驶员是否执行车轮回正操作;
8.若所述驾驶员未执行车轮回正操作,则获取车辆挡位状态信息;
9.根据所述车辆挡位状态信息生成相应的驾驶辅助信息并显示。
10.进一步的,所述输出所述车轮回正提醒信息,包括:
11.控制所述车辆的仪表系统显示所述车轮回正提醒信息;
12.控制所述车辆的多媒体系统语音播报所述车轮回正提醒信息,并显示环视检测系统生成的前轮毂视图。
13.进一步的,所述根据所述车辆挡位状态信息生成相应的驾驶辅助信息并显示,包括:
14.若所述车辆挡位状态信息为前进挡,则生成所述车辆的前方俯视视图并显示,所述前方俯视视图中绘制有前轮的动态轨迹线;
15.若所述车辆挡位状态信息为倒车挡,则生成所述车辆的后方俯视视图并显示,所述后方俯视视图中绘制有后轮的动态轨迹线。
16.进一步的,所述在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息,包括:
17.在接收到车辆高压上电信号的情况下,检测所述车辆的车轮是否回正;
18.若所述车辆的车轮未回正,则检测驾驶员是否存在发动车辆的意图;
19.若驾驶员存在发动车辆的意图,则生成并输出车轮回正提醒信息。
20.进一步的,所述检测所述车辆的车轮是否回正,包括:
21.检测电动助力转向系统是否发送车轮未回正信号;
22.若检测到电动助力转向系统发送的车轮未回正信号,则确定所述车辆的车轮未回正,所述车轮未回正信号为电动助力系统在检测到车轮未回正的情况下发送的。
23.进一步的,所述检测所述车辆的车轮是否回正,包括:
24.基于所述车轮的角度传感器采集所述车辆的方向盘偏移值;
25.若所述车辆的方向盘偏移值大于预设角度,则确定所述车辆的车轮未回正。
26.进一步的,所述检测驾驶员是否存在发动车辆的意图,包括:
27.基于车门传感器检测关门信号;
28.若检测到关门信号,则基于驾驶员座位传感器检测驾驶员就坐信号;
29.若检测到驾驶员就坐信号,则确定所述驾驶员存在发动车辆的意图。
30.相对于现有技术,本发明所述的车轮回正提醒方法具有以下优势:
31.本发明所述的车轮回正提醒方法,在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息,以提醒驾驶员进行车轮回正操作。然后,检测驾驶员是否执行车轮回正操作,在所述驾驶员未执行车轮回正操作情况下,获取车辆挡位状态信息,根据车辆挡位信息生成相应的驾驶辅助信息并显示,以辅助驾驶员获知车辆的动态信息,有利于协助驾驶员采取正确的驾驶策略,以此减少车辆剐蹭、碰撞事故的发生,提高行车的安全性。
32.本发明的另一目的在于提出一种车轮回正提醒系统,以解决用户在用车时未注意到车轮未回正而造成的碰撞剐蹭问题。
33.为达到上述目的,本发明的技术方案是这样实现的:
34.一种车轮回正提醒系统,应用于车辆,所述系统包括:
35.回正提醒模块,用于在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息;
36.第一检测模块,用于检测驾驶员是否执行车轮回正操作;
37.信息获取模块,用于若所述驾驶员未执行车轮回正操作,则获取车辆挡位状态信息;
38.驾驶辅助模块,用于根据所述车辆挡位状态信息生成相应的驾驶辅助信息并显示。
39.进一步的,所述回正提醒模块,包括:
40.第一提醒子模块,用于控制所述车辆的仪表系统显示所述车轮回正提醒信息;
41.第二提醒子模块,用于控制所述车辆的多媒体系统语音播报所述车轮回正提醒信息,并显示环视检测系统生成的前轮毂视图。
42.进一步的,所述驾驶辅助模块,包括:
43.第一信息生成子模块,用于若所述车辆挡位状态信息为前进挡,则生成所述车辆的前方俯视视图并显示,所述前方俯视视图中绘制有前轮的动态轨迹线;
44.第二信息生成子模块,用于若所述车辆挡位状态信息为倒车挡,则生成所述车辆的后方俯视视图并显示,所述后方俯视视图中绘制有后轮的动态轨迹线。
45.进一步的,所述回正提醒模块,包括:
46.第一检测子模块,用于在接收到车辆高压上电信号的情况下,检测所述车辆的车
轮是否回正;
47.第二检测子模块,用于若所述车辆的车轮未回正,则检测驾驶员是否存在发动车辆的意图;
48.回正提醒子模块,用于若驾驶员存在发动车辆的意图,则生成并输出车轮回正提醒信息。
49.进一步的,所述第一检测子模块,包括:
50.信号检测单元,用于检测电动助力转向系统是否发送车轮未回正信号;
51.第一确定单元,用于若检测到电动助力转向系统发送的车轮未回正信号,则确定所述车辆的车轮未回正,所述车轮未回正信号为电动助力系统在检测到车轮未回正的情况下发送的。
52.进一步的,所述第一检测子模块,包括:
53.偏移值检测采集单元,用于基于所述车轮的角度传感器采集所述车辆的方向盘偏移值;
54.第二确定单元,用于若所述车辆的方向盘偏移值大于预设角度,则确定所述车辆的车轮未回正。
55.进一步的,所述第二检测子模块,包括:
56.关门信号检测单元,用于基于车门传感器检测关门信号;
57.就坐信号检测单元,用于若检测到关门信号,则基于驾驶员座位传感器检测驾驶员就坐信号;
58.第三确定单元,用于若检测到驾驶员就坐信号,则确定所述驾驶员存在发动车辆的意图。
59.所述车轮回正提醒系统与上述车轮回正提醒方法相对于现有技术所具有的优势相同,在此不再赘述。
60.本发明的另一目的在于提出一种车辆,以解决用户在用车时未注意到车轮未回正而造成的碰撞剐蹭问题。
61.所述车辆包括上述车轮回正提醒系统,所述车轮回正提醒系统执行上述任一种车轮回正提醒方法。
62.所述车辆与上述车轮回正提醒方法相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
63.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
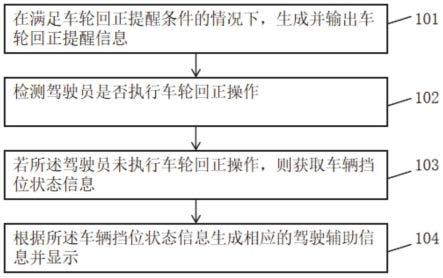
64.图1为本发明实施例提供的一种车轮回正提醒方法的步骤流程图;
65.图2为本发明实施例提供的一种多媒体系统显示的前轮毂视图的示意图;
66.图3为本发明实施例提供的一种多媒体系统显示的车辆前方俯视视图及前轮的动态轨迹线的示意图;
67.图4为本发明实施例提供的一种多媒体系统显示的车辆后方俯视视图及后轮的动态轨迹线的示意图;
68.图5为本发明实施例提供的一种车轮回正提醒系统的结构框图。
具体实施方式
69.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
70.下面将参考附图并结合实施例来详细说明本发明。
71.本发明实施例提供了一种车轮回正提醒方法和系统,应用于车辆,所述系统受eps(electric power steering,电动助力转向系统)信号系统、仪表系统、多媒体系统、语音系统、avm(around view monitor,环视检测系统)技术的支持。
72.其中,电动助力转向系统是一种直接依靠电机提供辅助扭矩的动力转向系统,主要由扭矩传感器、车速传感器、电动机、减速机构和电子控制单元(ecu,electronic control unit)等组成。其基本工作原理是:转矩传感器与转向轴连接在一起,当转向轴转动时,转矩传感器开始工作,把输入轴和输出轴在扭杆作用下产生的相对转动角位移变成电信号传给ecu,ecu根据车速传感器和转矩传感器的信号决定电动机的旋转方向和助力电流的大小,从而完成实时控制助力转向。电动助力转向系统可以在车速不同时提供电动机不同的助力效果,保证汽车在低速转向行驶时轻便灵活,高速转向行驶时稳定可靠。在本发明实施例中,电动助力转向系统用于检测车轮是否回正。
73.车辆仪表系统是反映车辆各系统工作状况的装置。常见的有燃油指示灯、清洗液指示灯、电子油门指示灯、前后雾灯指示灯及报警灯。汽车的常规仪表有车速里程表、转速表、机油压力表、水温表、燃油表、充电表等。在本发明实施例中,车辆仪表系统用于驾驶员以文字或图标、指示灯等形式显示车轮回正提醒。
74.车辆多媒体系统主要包含有语音交互、娱乐系统、地图导航、远程控制、辅助功能以及软硬件生态等,以全面提升用户的用车体验。在本发明实施例中,车辆多媒体系统用于语音播报车辆车轮未回正信息,并显示车辆俯视视图及车轮动态轨迹线。
75.环视检测系统是由分别安装在车辆前格栅、左右侧门镜及尾门的四个广角摄像头来收集数据,然后利用图像处理技术将其合成为一个完整的画面反映在驾驶室的多媒体系统显示界面上,驾驶员可以通过画面的指示调整车辆运动的方向。在本发明实施例中,环视检测系统用于生成多媒体系统界面的车辆俯视视图及车轮动态轨迹线。
76.参照图1,示出了本发明实施例提供的一种车轮回正提醒方法的步骤流程图。如图1所示,该车轮回正提醒方法可以包括以下步骤:
77.步骤101、在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息。
78.本发明实施例提供的车轮回正提醒方法,可以在驾驶员上一次停车熄火车轮未回正、再次上车后启动的场景下,进行车轮回正的检测与提醒,以避免由于驾驶员未察觉到车轮方向未回正直接加速,导致车辆驾驶侧向行驶撞上障碍物。
79.其中,所述车轮回正提醒条件可以包括但不限于:车辆处于待启动状态且车轮未回正、车辆高压上电的情况下车轮未回正,等等。所述车轮回正提醒信息用于提醒驾驶员执行车轮回正操作,并且,所述车轮回正提醒信息还可以包含车轮的当前角度信息,如前轮毂视图等。所述车轮回正提醒信息可以包括文字提醒信息,和/或,语音提醒信息。作为一种示例,可以通过车辆仪表系统,在车辆的仪表中显示文字提醒信息,如“请及时回正车轮”等;
也可以通过车辆多媒体系统播报语音提醒信息。
80.此外,在本发明实施例中,还可以在满足车轮回正提醒条件的情况下,控制指示灯或报警灯常亮或闪烁,同时生成并输出车轮回正提醒信息,以通过多个维度提醒驾驶员执行车轮回正操作。
81.在本发明的一种可选实施例中,所述输出车轮回正提醒信息,包括:
82.步骤s11、在接收到车辆高压上电信号的情况下,检测所述车辆的车轮是否回正;
83.步骤s12、若所述车辆的车轮未回正,则检测驾驶员是否存在发动车辆的意图;
84.步骤s13、若驾驶员存在发动车辆的意图,则生成并输出车轮回正提醒信息。
85.其中,所述高压上电信号是驾驶员上车发车后产生的信号。当接收到车辆高压上电信号时,说明车辆处于启动预发车状态。此时,如果车轮未回正,可能会引起由于驾驶员未察觉到车轮方向未回正直接加速,导致车辆驾驶侧向行驶撞上障碍物情况的发生。
86.为了避免用户在用车时未注意到车轮未回正而造成的碰撞剐蹭问题,本发明实施例在接收到高压上电信号的情况下,先检测车辆的车轮是否回正。具体地,可以检测eps信号系统是否发送车轮未回正信号。或者,也可以基于所述车轮的角度传感器采集所述车辆的方向盘偏移值判断车辆的车轮是否回正。
87.作为一种示例,可基于检测eps信号系统是否发送车轮未回正信号。步骤s11所述检测所述车辆的车轮是否回正,包括:检测电动助力转向系统是否发送车轮未回正信号;若检测到电动助力转向系统发送的车轮未回正信号,则确定所述车辆的车轮未回正,所述车轮未回正信号为电动助力转向系统在检测到车轮未回正的情况下发送的。
88.所述eps信号系统可以检测所述车辆的车轮是否回正,当车轮未回正时,向车轮回正提醒系统发送车轮未回正提醒信号。
89.车轮回正提醒系统接收到eps信号系统发出的信号的条件包括:车辆上高压,且车辆挡位状态处于停车挡,所述车辆挡位状态由信息获取模块获得;并且,车辆车速信号有效,且车速不为零,所述车辆车速信号由车速信号模块获得;并且,can(controller area network,控制器局域网络)通讯正常;并且,左/右转向灯开关状态为关。
90.其中,can是一种控制器之间通讯的现场总线。由于消费者对汽车功能需求的不断增加,汽车中电子器件不断增加,造成各控制器之间通讯信号接线方式复杂,因此设计了一个单一的网络总线,整车的所有控制器都可以挂在这个网络上。
91.作为另一种示例,可以基于所述车轮的角度传感器采集所述车辆的方向盘偏移值,根据方向盘的偏移值判断车轮是否回正。步骤s11所述在接收到车辆高压上电信号的情况下,检测所述车辆的车轮是否回正,包括:在接收到车辆高压上电信号的情况下,基于所述车轮的角度传感器采集所述车辆的方向盘偏移值;若所述车辆的方向盘偏移值大于预设角度,则确定所述车辆的车轮未回正。
92.具体的,车轮角度传感器通过采集车辆的车轮偏移值,判断车辆的车轮偏移值是否大于预设角度,当车辆的车轮偏移值大于预设角度时,说明此时车轮未回正。其中,所述预设角度可以根据车辆的产品型号、实际的测试数据等确定。
93.进一步的,若所述车辆的车轮未回正,则检测驾驶员是否存在发动车辆的意图。
94.如果车辆的车轮未回正,驾驶员直接发动车辆,就可能会导致车辆剐蹭、碰撞事故的发生。此时需要进行车轮回正提醒。
95.在另一种可能的应用场景下,如果不满足车轮回正提醒条件,例如车辆未回正,但驾驶员不存在发动车辆的意图,如车辆未收到关门信号,或驾驶员未在车辆驾驶座上就坐等。这种情况下并不会引起车辆剐蹭、碰撞事故的发生,因此无需进行车轮回正提醒,此时进行后续偷跑流程,所述后续偷跑流程指再次检测驾驶员是否存在发动车辆的意图的流程。
96.为了准确识别发出车轮回正提醒的时机,本发明实施例在确定车轮未回正的情况下,进一步检测驾驶员是否存在发动车辆的意图。示例性地,可以基于车门是否关闭,以及驾驶员是否就坐,确定驾驶员是否存在发动车辆的意图。
97.可选地,步骤s12所述若所述车辆的车轮未回正,则检测驾驶员是否存在发动车辆的意图,包括:基于车门传感器检测关门信号;若检测到关门信号,则基于驾驶员座位传感器检测驾驶员就坐信号;若检测到驾驶员就坐信号,则确定所述驾驶员存在发动车辆的意图。
98.其中,所述关门信号为指示车门处于关闭状态的信号,驾驶员就坐信号为指示驾驶员就坐于车辆驾驶座的信号。
99.本发明实施例中,首先判断是否接收到基于车门传感器检测的关门信号,若接收到关门信号,说明所述车辆车门已关闭。接下来,进一步判断车轮回正提醒系统是否接收到基于驾驶员座位传感器检测的驾驶员就坐信号,若接收到驾驶员就坐信号,则确定所述驾驶员存在发动车辆的意图。所述座位传感器可以是重力传感器,也可以是安全带传感器等任一能检测驾驶座就坐情况的传感器,此实施例不加限制。
100.进一步的,若驾驶员存在发动车辆的意图,则生成并输出车轮回正提醒信息。
101.本发明实施例中,若驾驶员存在发动车辆的意图,且此时车辆车轮处于未回正状态,则需要驾驶员进行车轮回正操作。所述车轮回正提醒系统通过回正提醒模块对驾驶员进行仪表系统文字的提醒、多媒体系统语音的提醒和界面提醒。
102.作为一种示例,所述在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息,包括:控制所述车辆的仪表系统显示所述车轮回正提醒信息;控制所述车辆的多媒体系统语音播报所述车轮回正提醒信息,并显示环视检测系统生成的前轮毂视图。
103.其中,仪表系统显示所述车轮回正提醒信息的触发条件为仪表系统收到eps信号系统发送的“方向盘回正提醒”信号,并且仪表系统收到所述车辆车门传感器检测到的关门信号。仪表系统的显示样式及文案以系统部相关策略为准,此实施例不加限制。在本发明的一种可选实施例中,当仪表系统总线信号丢失时间超过预设次数所述系统读取信号的周期时,即仪表系统总线信号丢失时间超过预设时间时,所述仪表系统不显示该“方向盘回正提醒”信号。
104.此外,本发明中的车轮回正提醒系统还可以控制所述车辆的多媒体系统语音播报所述车轮回正提醒信息,并显示环视检测系统生成的前轮毂视图。所述前轮毂视图可以清晰地反映出所述车辆前轮毂未回正,进而从视觉角度清晰地向驾驶员传递车辆车轮未回正的信息。
105.其中,多媒体系统语音播报所述车轮回正提醒信息的触发条件包括:多媒体系统收到eps信号系统发送的“方向盘回正提醒”信号,并且多媒体系统收到所述车辆车门传感器检测到的关门信号。在满足触发条件的情况下,仪表系统显示所述车轮回正提醒信息的
同时发出tts(text to speech,文本转语音)播报。需要说明的是,tts是语音合成应用的一种,它将储存于电脑中的文件,如帮助文件或者网页,转换成自然语音输出。
106.多媒体系统语音播报的内容与仪表系统显示的内容相同,具体以系统部相关策略为准,此实施例不加限制。
107.多媒体系统语音播报与仪表系统显示保持同步,当系统总线信号丢失时间超过预设数值的所述系统读取信号的周期时,即系统总线信号丢失时间超过预设时间时,所述系统不播报该“方向盘回正提醒”信号。或者,当tts播报过程中仪表系统显示所述车轮回正提醒信息结束时,tts播报结束,视为完成本条播报。
108.其中,参照图2,示出了一种多媒体系统显示的前轮毂视图的示意图。
109.多媒体系统界面显示所述汽车雷达和基于avm系统生成的前轮毂视图的触发条件包括:多媒体系统收到eps信号系统发送的“方向盘回正提醒”信号,并且多媒体系统收到所述车辆车门传感器检测到的关门信号,在仪表系统显示所述车轮回正提醒信息的同时显示所述汽车雷达和基于avm系统生成的前轮毂视图。
110.多媒体系统显示的内容如图2为例,多媒体屏幕界面左侧为雷达视图,可以获得所述车辆整个车身的俯视图,多媒体屏幕界面右侧为基于avm系统生成的前轮毂视图,从视图中可以清晰地观察到所述车辆前轮毂未回正,车体图案中的前轮被标记为未回正状态,进而从视觉角度清晰地向驾驶员传递车辆车轮未回正的信息。其中,车轮偏移的左右方向由eps信号系统检测并发送至多媒体系统,多媒体具体的显示界面应以ued(user experience design,用户体验设计)设计为准,此实施例不加限制。
111.在多媒体系统显示所述汽车雷达和基于avm系统生成的前轮毂视图的同时,驾驶员可进行如显示模式切换等的其他功能。
112.步骤102、检测驾驶员是否执行车轮回正操作。
113.本发明实施例中,若所述驾驶员执行车轮回正操作,eps信号系统检测到回正车轮信号,发送车轮已回正信号至车轮回正提醒系统,车轮回正提醒系统收到信号后车轮回正提醒流程结束。
114.步骤103、若所述驾驶员未执行车轮回正操作,则获取车辆挡位状态信息。
115.本发明实施例中,若所述驾驶员未执行车轮回正操作,说明驾驶员不想进行车轮回正操作。在这种情况下,为了避免车辆的行驶轨迹与驾驶员预期行驶轨迹偏差过大,本发明实施例可以进一步获取车辆挡位信息,以便根据车辆挡位信息确定驾驶员的行车意图。其中,所述车辆挡位信息由信息获取模块获取并传输至车轮回正系统。
116.步骤104、根据所述车辆挡位状态信息生成相应的驾驶辅助信息并显示。
117.本发明实施例中,当所述车轮回正系统接收信息获取模块获取的车辆挡位状态信息为空挡时,说明驾驶员不进行让车辆驶出的操作,这种情况下不进行仪表文字提示、多媒体语音提示、多媒体界面图像提示中的任意一种,车轮回正提醒结束。
118.在本发明的一种可选实施例中,所述根据所述车辆挡位状态信息生成相应的驾驶辅助信息并显示,包括:
119.步骤s21、若所述车辆挡位状态信息为前进挡,则生成所述车辆的前方俯视视图并显示,所述前方俯视视图中绘制有前轮的动态轨迹线;
120.步骤s22、若所述车辆挡位状态信息为倒车挡,则生成所述车辆的后方俯视视图并
显示,所述后方俯视视图中绘制有后轮的动态轨迹线。
121.当所述车轮回正系统接收信息获取模块获取的车辆挡位状态信息为前进挡时,说明驾驶员有让车辆向前驶出的意图,这种情况下生成所述车辆的前方俯视视图并显示,所述前方俯视视图中绘制有前轮的动态轨迹线。
122.参照图3,示出了一种多媒体系统显示的车辆前方俯视视图及前轮的动态轨迹线的示意图。
123.多媒体系统界面显示所述汽车雷达和基于avm系统生成的前方俯视视图及前轮动态轨迹线的触发条件包括:驾驶员将所述车辆挡位信息变为前进挡,且在驾驶员将所述车辆挡位信息变为前进挡之前,多媒体系统未收到eps信号系统发送的“方向盘回正完成”信号。
124.多媒体系统显示的内容如图3为例,多媒体显示界面左侧为雷达视图,可以获得所述车辆整个车身的俯视图,多媒体显示界面右侧为基于avm系统生成的前方俯视视图及前轮动态轨迹线,从视图中可以清晰地观察到所述车辆前轮毂未回正以及所述车辆前轮的动态轨迹线,进而从视觉角度清晰地向驾驶员传递车辆车轮的运动趋势。
125.所述车轮回正系统通过接收所述车辆地理位置信息、所述车辆速度传感器采集的车速信息、所述车轮角度传感器采集所述车辆的方向盘偏移值,借助轨迹运算相关算法绘制出所述车辆前轮动态轨迹线,并将动态轨迹信息传送给多媒体系统。动态轨迹线由多媒体系统界面显示,以此将动态轨迹预测传达给驾驶员。
126.多媒体系统界面显示的默认值为avm俯视显示模式,多媒体具体的显示界面应以ued设计为准,此实施例不加限制。
127.在多媒体系统显示所述汽车雷达和基于avm系统生成的前方俯视视图及前轮动态轨迹线的同时,驾驶员可进行如显示模式切换等的其他功能。
128.在多媒体系统界面显示所述汽车雷达和基于avm系统生成的前方俯视视图及前轮动态轨迹线时,若系统界面持续显示两秒,或驾驶员将所述车辆的挡位从前进挡变换为非前进挡,或驾驶员手动关闭多媒体系统界面,则车轮回正提醒自动关闭。
129.可选的,当所述车轮回正系统接收信息获取模块获取的车辆挡位状态信息为倒车挡时,说明驾驶员有让车辆向后驶出的意图,这种情况下生成所述车辆的后方俯视视图并显示,所述后方俯视视图中绘制有后轮的动态轨迹线。
130.参照图4,示出了一种多媒体系统显示的车辆后方俯视视图及后轮的动态轨迹线的示意图。
131.多媒体系统界面显示所述汽车雷达和基于avm系统生成的后方俯视视图及后轮动态轨迹线的触发条件包括:驾驶员将所述车辆挡位信息变为倒车挡,且在驾驶员将所述车辆挡位信息变为倒车挡之前,多媒体系统未收到eps信号系统发送的“方向盘回正完成”信号。
132.多媒体系统显示的内容如图4为例,多媒体显示界面左侧为雷达视图,可以获得所述车辆整个车身的俯视图,多媒体显示界面右侧为基于avm系统生成的后方俯视视图及后轮动态轨迹线,从视图中可以清晰地观察到所述车辆前轮毂未回正以及所述车辆后轮的动态轨迹线,进而从视觉角度清晰地向驾驶员传递车辆车轮的运动趋势。
133.所述车轮回正系统通过接收所述车辆地理位置信息、所述车辆速度传感器采集的
车速信息、所述车轮角度传感器采集所述车辆的方向盘偏移值,借助轨迹运算相关算法绘制出所述车辆后轮动态轨迹线,并将动态轨迹信息传送给多媒体系统。动态轨迹线由多媒体系统界面显示,以此将动态轨迹预测传达给驾驶员。
134.多媒体系统界面显示的默认值为avm俯视显示模式,多媒体具体的显示界面应以ued设计为准,此实施例不加限制。
135.在多媒体系统显示所述汽车雷达和基于avm系统生成的后方俯视视图及后轮动态轨迹线的同时,驾驶员可进行如显示模式切换等的其他功能。
136.在多媒体系统界面显示所述汽车雷达和基于avm系统生成的后方俯视视图及后轮动态轨迹线时,若系统界面持续显示预设时间,或驾驶员将所述车辆的挡位从倒车挡变换为非倒车挡,或驾驶员手动关闭多媒体系统界面,则车轮回正提醒自动关闭。
137.进一步的,若所述车辆的车速大于预设阈值时,车轮回正提醒结束。该预设阈值可以为15km/h、30km/h等等,此实施例不加限制。
138.本发明实施例中,在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息,以提醒驾驶员进行车轮回正操作。然后,检测驾驶原是否执行车轮回正操作,在所述驾驶员未执行车轮回正操作情况下,获取车辆挡位状态信息,根据车辆挡位信息生成相应的驾驶辅助信息并显示,以辅助驾驶员获知车辆的动态信息,有利于协助驾驶员采取正确的驾驶策略,以此减少车辆剐蹭、碰撞事故的发生,提高行车的安全性。
139.图5为本发明实施例提供的一种车轮回正提醒系统的框图,如图5所示,该车轮回正系统,包括:
140.回正提醒模块501,用于在满足车轮回正提醒条件的情况下,生成并输出车轮回正提醒信息;
141.第一检测模块502,用于检测驾驶员是否执行车轮回正操作;
142.信息获取模块503,用于若所述驾驶员未执行车轮回正操作,则获取车辆挡位状态信息;
143.驾驶辅助模块504,用于根据所述车辆挡位状态信息生成相应的驾驶辅助信息并显示。
144.可选地,所述回正提醒模块,包括:
145.第一提醒子模块,用于控制所述车辆的仪表系统显示所述车轮回正提醒信息;
146.第二提醒子模块,用于控制所述车辆的多媒体系统语音播报所述车轮回正提醒信息,并显示环视检测系统生成的前轮毂视图。
147.可选地,所述驾驶辅助模块,包括:
148.第一信息生成子模块,用于若所述车辆挡位状态信息为前进挡,则生成所述车辆的前方俯视视图并显示,所述前方俯视视图中绘制有前轮的动态轨迹线;
149.第二信息生成子模块,用于若所述车辆挡位状态信息为倒车挡,则生成所述车辆的后方俯视视图并显示,所述后方俯视视图中绘制有后轮的动态轨迹线。
150.可选地,所述回正提醒模块,包括:
151.第一检测子模块,用于在接收到车辆高压上电信号的情况下,检测所述车辆的车轮是否回正;
152.第二检测子模块,用于若所述车辆的车轮未回正,则检测驾驶员是否存在发动车
辆的意图;
153.回正提醒子模块,用于若驾驶员存在发动车辆的意图,则生成并输出车轮回正提醒信息。
154.可选地,所述第一检测子模块,包括:
155.信号检测单元,用于检测电动助力转向系统是否发送车轮未回正信号;
156.第一确定单元,用于若检测到电动助力转向系统发送的车轮未回正信号,则确定所述车辆的车轮未回正,所述车轮未回正信号为电动助力系统在检测到车轮未回正的情况下发送的。
157.可选地,所述第一检测子模块,包括:
158.偏移值检测采集单元,用于基于所述车轮的角度传感器采集所述车辆的方向盘偏移值;
159.第二确定单元,用于若所述车辆的方向盘偏移值大于预设角度,则确定所述车辆的车轮未回正。
160.可选地,所述第二检测子模块,包括:
161.关门信号检测单元,用于基于车门传感器检测关门信号;
162.就坐信号检测单元,用于若检测到关门信号,则基于驾驶员座位传感器检测驾驶员就坐信号;
163.第三确定单元,用于若检测到驾驶员就坐信号,则确定所述驾驶员存在发动车辆的意图。
164.需要说明的是,所述车轮回正提醒系统与上述车轮回正提醒方法相对于现有技术所具有的优势相同,在此不再赘述。
165.本发明实施例还提供了一种车辆,所述车辆包括上述车轮回正提醒系统,所述车轮回正提醒系统执行上述任一种车轮回正提醒方法。
166.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。