1.本发明涉及一种基板检查装置。
背景技术:
2.已知有对基板进行检查的基板检查装置。作为此种基板检查装置,例如在日本公开公报特开2005-101226号公报中公开了一种装置,其在基板保持装置的载置面上保持有基板的状态下,对所述基板进行检查。
3.日本公开公报特开2005-101226号公报的基板保持装置在载台的载置面,穿设有对所述基板的下表面进行吸附的多个吸附孔。所述基板保持装置经由所述吸附孔来真空吸附所述基板,由此,可容易地将所述基板保持于所述载置面。
4.再者,所述基板保持装置在所述载台的载置面具有喷出孔,所述喷出孔喷出对所述基板的下表面喷吹的气体。而且,所述基板保持装置在所述载台中具有埋设于所述喷出孔附近的压力计。所述基板保持装置根据所述压力计的测量结果,对从所述喷出孔喷出的气体的流量进行调整。
5.现有技术文献
6.专利文献
7.专利文献1:日本公开公报特开2005-101226号公报
技术实现要素:
8.发明所要解决的问题
9.此外,埋设于载台内的压力计有时被用于检测是否有基板被吸附于所述载台的载置面上。即,通过使用所述压力计来测量所述载置面与所述基板之间的压力,从而可检测是否有所述基板被吸附于所述载置面。并且,在所述压力计位于靠近所述载置面的位置的情况下,可精度更好地检测所述基板相对于所述载置面的吸附状态。
10.然而,在所述载台是以旋转轴线为中心而旋转的旋转平台的情况下,若欲在所述旋转平台的内部如上所述那样埋设压力计,则所述压力计的配线将贯穿所述旋转平台的旋转部分。因此,有可能因所述旋转平台的旋转导致所述压力计的配线发生扭曲。为了防止此种配线的扭曲,必须使用旋转接头来将所述压力计的配线配置于所述旋转平台内。
11.近年来,伴随基板的电路的精细化,要求提高用于基板检查装置的旋转平台的旋转精度。然而,若如上所述那样对于旋转平台使用旋转接头,则会产生因所述旋转接头处产生的摩擦或阻力等导致所述旋转平台的旋转精度下降等问题。
12.本发明的目的在于提供一种基板检查装置,既可检测电路基板相对于旋转平台的载置面的吸附状态,又可提高所述旋转平台的旋转精度。
13.解决问题的技术手段
14.本发明的一实施方式的基板检查装置是用于检查电路基板的基板检查装置。所述基板检查装置包括:旋转平台,具有能以吸附的状态来载置所述电路基板的载置面,且在平
面观察所述载置面时,能以旋转轴线为中心而旋转;旋转平台支撑部,能够旋转地支撑所述旋转平台;吸附机构,具有抽吸装置以及一端侧连接于所述抽吸装置且另一端侧位于载置面的抽吸路,通过所述抽吸装置来抽吸所述抽吸路内的气体,由此,将载置于所述载置面上的所述电路基板吸附于所述载置面;流量检测部,对在所述抽吸路中流至位于所述旋转平台支撑部内的部分的气体的流量进行检测;流量判定部,判定由所述流量检测部所检测出的气体的流量是否为规定值以上;非接触检测部,非接触地检测所述载置面上的所述电路基板的配置状态;以及检查部,根据所述流量判定部及所述非接触检测部得出的检测结果来进行所述电路基板的检查。
15.发明的效果
16.根据本发明的一实施方式的基板检查装置,既可检测电路基板相对于旋转平台的载置面的吸附状态,又可提高所述旋转平台的旋转精度。
附图说明
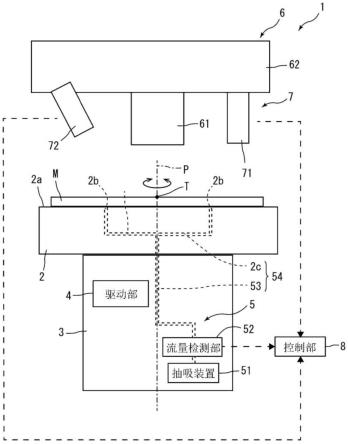
17.图1是示意性地表示第一实施方式的基板检查装置的结构的图。
18.图2是表示控制部的概略结构的功能方块图。
19.图3是表示在电路基板的检查前进行的电路基板的检测流程的流程图。
20.图4是示意性地表示通过激光光传感器来检测电路基板的浮起的情况的图。
21.图5是表示具有多个基板单片的电路基板的概略结构的平面图。
22.图6是示意性地表示第二实施方式的基板检查装置的结构的图。
23.图7是表示使用移送装置将电路基板载置于旋转平台的载置面上的情况的示意图。
具体实施方式
24.以下,参照附图来详细说明本发明的实施方式。再者,对于图中的相同或相当的部分标注相同的符号并不再重复其说明。而且,各图中的构成构件的尺寸并非忠实地表示实际的构成构件的尺寸及各构成构件的尺寸比率等。
25.再者,以下的说明中,将设置有基板检查装置1的状态的铅垂方向称作“上下方向”。
26.<第一实施方式>
27.(基板检查装置)
28.图1是表示本发明的实施方式的基板检查装置1的概略结构的图。基板检查装置1是用于对载置于旋转平台2的载置面2a上的电路基板m进行检查的装置。基板检查装置1例如进行电路基板m所具有的电路的导通检查。再者,本实施方式中,电路基板m为树脂制的电路基板。
29.基板检查装置1具有旋转平台2、旋转平台支撑部3、驱动部4、吸附机构5、检查部6、非接触检测部7以及控制部8。
30.旋转平台2可相对于旋转平台支撑部3以旋转轴线p为中心而旋转地受到支撑。本实施方式的旋转平台2在正交三方向上也能移动。旋转平台2为平板状。旋转平台2的上表面为载置电路基板m的载置面2a。电路基板m在载置面2a上的规定位置相对于旋转平台2而固
定。所述规定位置是在载置面2a上,在保持有电路基板m的状态下后述的检查部6可检查电路基板m的位置。
31.再者,虽未特别图示,但旋转平台2也可具有用于固定电路基板m的爪部等。
32.旋转平台2在载置面2a的保持电路基板m的位置具有多个吸附孔2b。而且,旋转平台2在其内部具有与多个吸附孔2b相连的气体通路2c。即,多个吸附孔2b位于气体通路2c的一端侧。气体通路2c的另一端侧经由后述的吸附机构5的气体配管53而与抽吸装置51相连。
33.详细情况如后述那样,通过抽吸装置51来抽吸气体通路2c内的气体而使气体通路2c内产生负压,由此,可在载置面2a上的多个吸附孔2b的附近吸附电路基板m。再者,多个吸附孔2b及气体通路2c构成后述的吸附机构5的一部分。
34.旋转平台支撑部3位于旋转平台2之下,可旋转地支撑旋转平台2。旋转平台支撑部3在内部具有驱动部4、吸附机构5的抽吸装置51及流量检测部52。
35.驱动部4对旋转平台2给予以旋转轴线p为中心而使旋转平台2旋转的驱动力。驱动部4例如为马达。驱动部4被收容在旋转平台支撑部3内。再者,驱动部4也可位于旋转平台支撑部3之外。
36.吸附机构5是为了使电路基板m吸附于旋转平台2的载置面2a上,而使载置面2a的多个吸附孔2b的附近产生负压的机构。吸附机构5具有抽吸装置51、流量检测部52、气体配管53、气体通路2c以及多个吸附孔2b。
37.抽吸装置51例如是如真空泵装置等那样可抽吸气体的装置。抽吸装置51被收容于旋转平台支撑部3的内部。气体通路2c的另一端侧经由气体配管53而可使气体流出/流入地与抽吸装置51相连。再者,抽吸装置51也可位于旋转平台支撑部3之外。
38.气体配管53将抽吸装置51与旋转平台2内的气体通路2c予以连接。即,气体配管53构成将抽吸装置51与旋转平台2内的气体通路2c相连的抽吸路54的一部分。本发明的抽吸路54包含气体配管53的内部以及旋转平台2内的气体通路2c。
39.再者,气体配管53贯穿连接部,所述连接部能够旋转地连接旋转平台支撑部3与旋转平台2。
40.流量检测部52对流经气体配管53中的位于旋转平台支撑部3内的部分的气体的流量进行检测。流量检测部52的检测结果作为流量检测信号而输入至基板检查装置1的控制部8。
41.非接触检测部7包含非接触检测传感器。所述非接触检测传感器例如使用光、激光光、声音等,对于检测对象物非接触地对检测对象物的有无或所述检测对象物的上下方向的位置进行检测。
42.本实施方式中,非接触检测部7包含两种非接触检测传感器。具体而言,非接触检测部7包含光传感器71以及激光光传感器72。
43.光传感器71在从未图示的光源出射的光被旋转平台2的载置面2a或电路基板m的表面反射的情况下,检测其反射光。因而,光传感器71对旋转平台2的载置面2a照射光,并检测其反射光,由此可检测在载置面2a上是否存在电路基板m。由光传感器71所检测出的结果作为检测信号而输入至控制部8。光传感器71对应于本发明的电路基板非接触检测部。
44.激光光传感器72是使用激光光的激光位移计。本实施方式中,激光光传感器72的光源是出射线激光光的光源。激光光传感器72通过检测对旋转平台2的载置面2a上的电路
基板m所照射的激光光的反射光,从而检测载置面2a上的电路基板m的高度位置。以下的说明中,旋转平台2的载置面2a上的电路基板m的高度位置也称作电路基板m的浮起量。
45.激光光传感器72检测电路基板m在检查位置t附近的浮起量,并作为所述位置检测信号而输出至控制部8。激光光传感器72对应于本发明的高度位置非接触检测部。
46.再者,检查位置t是后述的检查部6的探针单元61接触至电路基板m而检查电路基板m的位置。而且,检查位置t附近不仅为检查位置t,还包含电路基板m的浮起会对检查位置t处的检查部6的检查造成影响的范围。例如,检查位置t附近是指比电路基板m的外缘靠近后述的检查部6的探针单元61接触至电路基板m的接触位置的部分。
47.检查部6对电路基板m所具有的电路的通电进行检查。检查部6具有探针单元61与检查本体部62。
48.探针单元61具有与构成电路基板m的电路的电气配线接触的探针。探针单元61经由所述探针来使电流流至电路基板m的电路,并且对流至规定部位的电流进行检测。所检测出的电流经由检查本体部62,作为电流检测信号而输入至控制部8。探针单元61被支撑于检查本体部62。
49.如上所述,探针单元61接触至电路基板m而进行检查。因此,电路基板m的检查位置t是与探针单元61的接触位置相同的位置。再者,探针单元61对应于本发明的接触检查部。
50.控制部8基于所输入的电流检测信号来判定电路基板m的电路的正常或异常。而且,控制部8根据从吸附机构5的流量检测部52输出的流量检测信号、从光传感器71输出的检测信号以及从激光光传感器72输出的位置检测信号,来进行借助检查部6的检测。即,控制部8在根据流量检测信号及检测信号而判定为在旋转平台2的载置面2a上的规定位置吸附有电路基板m、且根据位置检测信号而判定为电路基板m的浮起量小于规定值的情况下,进行检查部6对电路基板m的检查。如此,控制部8控制基板检查装置1的检查。
51.图2是表示控制部8的概略结构的功能方块图。控制部8具有流量判定部81、电路基板位置判定部82、电路基板高度判定部83、检查控制部84以及警报输出部85。
52.流量判定部81使用从流量检测部52输入的流量检测信号,来判定气体通路2c中的气体的流量是否为规定值以上。流量判定部81在气体通路2c中的气体的流量为规定值以上的情况下,生成警报控制信号并输出至检查控制部84。流量判定部81在气体通路2c中的气体的流量小于规定值的情况下,生成检查控制信号并输出至检查控制部84。
53.所述规定值是在电路基板m未吸附至旋转平台2的载置面2a的状态下流经气体通路2c的流量。所谓电路基板m吸附至载置面2a的状态,是指如下所述的状态,即,通过吸附机构5将电路基板m相对于载置面2a而固定至可通过检查部6来检查电路基板m的程度。
54.电路基板位置判定部82使用从非接触检测部7的光传感器71输入的检测信号,来判定是否有电路基板m位于旋转平台2的载置面2a上的规定位置。电路基板位置判定部82在有电路基板m位于旋转平台2的载置面2a上的规定位置的情况下,对检查控制部84输出检查控制信号。电路基板位置判定部82在无电路基板m位于旋转平台2的载置面2a上的规定位置的情况下,对检查控制部84输出警报控制信号。
55.电路基板高度判定部83使用从非接触检测部7的激光光传感器72输入的位置检测信号,来判定由检查部6所检查的电路基板m在检查位置t附近的浮起。电路基板高度判定部83在电路基板m在检查位置t附近的浮起量为规定值以下的情况下,对检查控制部84输出检
查控制信号。电路基板高度判定部83在电路基板m在检查位置t附近的浮起量大于规定值的情况下,对检查控制部84输出警报控制信号。
56.所述规定值被设定为电路基板m的浮起量会对探针单元61的检查结果造成影响的值。例如,所述规定值被设定为下述程度的浮起量,即,当使探针单元61接触至电路基板m时,电路基板m的检查结果发生变化。
57.检查控制部84在可进行电路基板m的检查的情况下,即,在从流量判定部81、电路基板位置判定部82及电路基板高度判定部83全部输入检查控制信号的情况下,使基板检查装置1的未图示的检查驱动部驱动而进行电路基板m的检查。再者,所述检查驱动部例如包含进行旋转平台2的上下移动或水平方向移动的驱动部、或者检查部6的驱动部等。
58.检查控制部84在无法进行电路基板m的检查的情况下,即,在从流量判定部81、电路基板位置判定部82及电路基板高度判定部83的至少一个输入警报控制信号的情况下,对警报输出部85输出警报信号。
59.具体而言,检查控制部84输出所述警报信号的情况是:由流量判定部81判定为气体的流量为规定值以上的情况、由电路基板位置判定部82判定为无电路基板m位于旋转平台2的载置面2a上的规定位置的情况、由电路基板高度判定部83判定为电路基板m的浮起量大于规定值的情况等。
60.警报输出部85根据从检查控制部84输入的警报信号来使未图示的显示装置等进行警报显示。
61.(电路基板的检测)
62.接下来,使用图3所示的流程图,来说明在具有如上所述的结构的基板检查装置1中,在载置于旋转平台2的载置面2a上的电路基板m的检查之前所进行的电路基板m的检测。
63.当图3所示的流程开始时,首先,流量检测部52对流经气体通路2c内的气体的流量进行检测。由流量检测部52所检测的流量作为流量检测信号而输入至控制部8。控制部8的流量判定部81使用所输入的流量检测信号,来判定流经气体通路2c内的气体的流量是否为规定值以上。
64.若控制部8的流量判定部81判定为流经气体通路2c内的气体的流量为规定值以上,即,若在图3的步骤s1中为是,则前进至步骤s5,警报输出部85在未图示的显示画面等上输出警报。若流经气体通路2c内的气体的流量为规定值以上,则考虑是因为在旋转平台2的载置面2a与电路基板m之间存在间隙,气体流经所述间隙内。随后,结束所述流程。
65.另一方面,若控制部8的流量判定部81判定为流经气体通路2c内的气体的流量并非规定值以上,即,若在图3的步骤s1中为否,则前进至步骤s2,控制部8的电路基板位置判定部82判定是否有电路基板m位于旋转平台2上的规定位置。
66.即,步骤s2中,光传感器71在旋转平台2的载置面2a上检测电路基板m。具体而言,光传感器71使用光来非接触地检测旋转平台2的载置面2a的规定位置处的高度,并输出其检测结果来作为检测信号。从光传感器71输出的检测信号被输入至控制部8。控制部8的电路基板位置判定部82使用所述检测信号来判定是否有电路基板m位于旋转平台2的载置面2a上的规定位置。
67.若控制部8的电路基板位置判定部82判定为有电路基板m位于旋转平台2的载置面2a上的规定位置,即,若在图3的步骤s2中为是,则前进至步骤s3,进行检查位置t附近的电
路基板m的高度判定。另一方面,若控制部8的电路基板位置判定部82判定为无电路基板m位于旋转平台2的载置面2a上的规定位置,即,若在图3的步骤s2中为否,则前进至步骤s5,控制部8的警报输出部85在未图示的显示画面等上输出警报。
68.步骤s3中,激光光传感器72检测电路基板m的检查位置t附近的高度。激光光传感器72使用激光光来非接触地检测电路基板m的检查位置t附近的高度,并输出其检测结果来作为位置检测信号。从激光光传感器72输出的位置检测信号被输入至控制部8。控制部8的电路基板高度判定部83使用所述位置检测信号来判定电路基板m的检查位置t附近的高度是否为规定值以下。
69.若控制部8的电路基板高度判定部83判定为电路基板m的检查位置t附近的高度为规定值以下,即,若在图3的步骤s3中为是,则前进至步骤s4,控制部8的检查控制部84进行电路基板m的检查。具体而言,检查控制部84对基板检查装置1的未图示的检查驱动部输出驱动信号。随后,结束所述流程。
70.再者,如图4所示,激光光传感器72在比检查部6的探针单元61接触至电路基板m的位置为低的位置,检测电路基板m的检查位置t附近的高度。因此,如上所述,若在步骤s3中为是,则通过所述检查驱动部来如图4中的空心箭头所示那样,使旋转平台2朝上移动,使电路基板m接触至探针单元61。再者,基板检查装置1也可为旋转平台2被固定,而探针单元61可沿上下方向移动。
71.另一方面,若控制部8的电路基板高度判定部83判定为电路基板m的检查位置t附近的高度并非规定值以下,即,若在图3的步骤s3中为否,则前进至步骤s5,控制部8的警报输出部85在未图示的显示画面等上输出警报。
72.如上所述的流程是在针对电路基板m的多个电路的检查位置t进行检查之前分别执行。即,如图5所示,在电路基板m包含具有电路的多个基板单片m1~m16的情况下,基板检查装置1在分别检查多个基板单片m1~m16之前,利用如上所述的流程来进行电路基板m的检测。由此,在对电路基板m的多个基板单片m1~m16进行检查时,可使检查部6的探针单元61更切实地电性接触至多个基板单片m1~m16的电路。
73.再者,电路基板m也可不具有多个基板单片。即,电路基板m也可为在制品状态下未被分割的基板。
74.通过进行以上的流程,从而可进行电路基板m相对于旋转平台2的载置面2a的吸附状态的检测;是否有电路基板m位于旋转平台2的载置面2a上的规定位置的检测;以及在电路基板m的检查位置t的附近,电路基板m相对于载置面2a的浮起量的检测,并根据这些检测结果来输出警报或进行电路基板m的检查。
75.详细而言,在旋转平台2的载置面2a上的规定位置,电路基板m吸附至载置面2a的状态下,且在电路基板m的检查位置t的附近电路基板m相对于载置面2a的浮起量小的情况下,基板检查装置1进行电路基板m的检查。
76.另一方面,基板检查装置1在无电路基板m吸附至旋转平台2的载置面2a的情况下、无电路基板m位于旋转平台2的载置面2a上的规定位置的情况下、或在电路基板m的检查位置t的附近电路基板m相对于载置面2a的浮起量大的情况下,进行警报输出,以告知给基板检查装置1的操作员。
77.根据以上,本实施方式的基板检查装置1是用于检查电路基板m的基板检查装置。
基板检查装置1包括:旋转平台2,具有能以吸附的状态来载置电路基板m的载置面2a,且在平面观察载置面2a时,能以旋转轴线p为中心而旋转;旋转平台支撑部3,可旋转地支撑旋转平台2;吸附机构5,具有抽吸装置51以及一端侧连接于抽吸装置51且另一端侧位于载置面2a的抽吸路54,通过抽吸装置51来对抽吸路54内的气体进行抽吸,由此,将载置于载置面2a上的电路基板m吸附于载置面2a;流量检测部52,对在抽吸路54中流至位于旋转平台支撑部3内的部分的气体的流量进行检测;流量判定部81,判定由流量检测部52所检测出的气体的流量是否为规定值以上;非接触检测部7,非接触地检测载置面2a上的电路基板m的配置状态;以及检查部6,根据流量判定部81及非接触检测部7得出的检测结果来进行电路基板m的检查。
78.为了检测电路基板m相对于旋转平台2的载置面2a的吸附状态,考虑在旋转平台2的内部埋设对载置面2a与电路基板m之间的压力进行检测的压力传感器。然而,此时,所述压力计的配线必须贯穿旋转平台2的旋转部分,因此必须在所述旋转部分使用旋转接头。此时,会产生因所述旋转接头处产生的摩擦或阻力等导致所述旋转平台的旋转精度下降等问题。
79.与此相对,通过在基板检查装置中适用本实施方式的结构,从而无须在旋转平台2的内部设置压力传感器,便可高精度地检测电路基板m相对于旋转平台2的载置面2a的吸附状态及配置状态。并且,所述结构中,流量检测部52及非接触检测部7位于旋转平台2之外。
80.因而,流量检测部52及非接触检测部7的配线位于旋转平台2之外,因此,不需要在旋转平台2与旋转平台支撑部3的连接部分使用用于使位于旋转平台2内部的传感器的配线穿过的旋转接头。因此,可减小旋转平台2相对于旋转平台支撑部3的滑动阻力。因此,可提高旋转平台2的旋转精度。
81.再者,所述吸附状态是指如下所述的状态,即,电路基板m相对于旋转平台2的载置面2a而吸附至可进行检查部6对电路基板m的检查的程度。在电路基板m相对于旋转平台2的载置面2a而吸附的情况下,由流量检测部52所检测的气体的流量少于规定值。
82.所述配置状态是指旋转平台2的载置面2a上的电路基板m的位置、或电路基板m相对于载置面2a的浮起的有无等。在有电路基板m位于旋转平台2的载置面2a的规定位置的情况下,可通过非接触检测部7来检测电路基板m的存在。而且,电路基板m相对于旋转平台2的载置面2a的浮起也能通过非接触检测部7来检测。
83.检查部6在由流量判定部81判定为由流量检测部52所检测出的气体的流量小于规定值的情况下、且由非接触检测部7检测出有电路基板m以规定的状态而配置于载置面2a上的情况下,进行电路基板m的检查。
84.在由流量判定部81判定为由流量检测部52所检测出的气体的流量小于规定值的情况下,为电路基板m被吸附于旋转平台2的载置面2a的状态。如此,在电路基板m被吸附于旋转平台2的载置面2a的状态下,且以规定的状态而配置于载置面2a上的情况下,可通过检查部6来高精度地进行电路基板m的检查。因而,在如上所述的情况下,通过检查部6来进行电路基板m的检查,由此,可抑制电路基板m的检查结果的偏差。
85.再者,所述规定的状态是指电路基板m位于旋转平台2的载置面2a上的规定位置的状态、或电路基板m相对于旋转平台2的载置面2a的浮起量为规定值以下的状态等。
86.检查部6具有接触至电路基板m而进行检查的探针单元61。非接触检测部7具有:光
传感器71,非接触地检测载置面2a上的电路基板m的有无;以及激光光传感器72,在比电路基板m的外缘靠近探针单元61接触至电路基板m的接触位置的部分,非接触地检测电路基板m相对于载置面2a的高度。由非接触检测部7所检测的所述规定的状态是:由光传感器71检测出有电路基板m位于载置面2a上的规定位置的情况、且由激光光传感器72检测出电路基板m相对于载置面2a的高度位置为规定值以下的情况。
87.由此,作为非接触检测部7,使用光传感器71及激光光传感器72,并且在检测电路基板m的配置状态时分开使用这些传感器,由此,可精度更好地检测电路基板m相对于旋转平台2的载置面2a的配置状态。
88.即,一般将检测精度不太高的光传感器71用于检测有电路基板m位于旋转平台2的载置面2a上的规定位置的情况,另一方面,将精度相对较高的激光光传感器72用于检测电路基板m相对于旋转平台2的载置面2a的浮起量。由此,可对应于非接触传感器的灵敏度区域来高精度地检测电路基板m的配置状态。
89.激光光传感器72对于载置面2a,非接触地检测在电路基板m中探针单元61所接触的接触位置的高度。由此,可高精度地检测电路基板m的检查位置附近的浮起量。因而,通过根据使用激光光传感器72而获得的检测结果来进行电路基板m的检查,从而可在使探针单元61更切实地接触至电路基板m的状态下进行电路基板m的检查。因此,实现电路基板m的检查精度的提高。
90.电路基板m包含具有电路的多个基板单片m1~m16。检查部6在检查各基板单片的电路之前,在由流量判定部81判定为由流量检测部52检测出的气体的流量小于规定值、且由非接触检测部7检测出载置面2a上的电路基板m的配置状态之后,检查各电路。
91.由此,即使在电路基板m具有多个基板单片m1~m16的情况下,也能在进行各基板单片的电路检查之前,容易地检测旋转平台2的载置面2a上的电路基板m的吸附状态及配置状态。再者,使用基板单片m1~基板单片m16的示例进行了说明,但基板的个数可设为任意数。
92.<第二实施方式>
93.图6是表示第二实施方式的基板检查装置1的概略结构的图。第二实施方式中,与第一实施方式的不同之处在于,第一实施方式的抽吸路被分为:位于载置面的中央的中央气体通路2ca及中央气体配管53a、与比中央气体通路2ca位于径方向外侧的外周气体通路2cb及外周气体配管53b,流量检测部52对流经中央气体配管53a中的位于中央气体通路2ca的旋转平台支撑部3内的部分的气体的流量进行检测。除此以外,对于同样的结构省去说明。
94.中央气体通路2ca的一端侧连接于抽吸装置51,另一端侧位于载置面2a的中央附近。外周气体通路2cb的一端侧连接于抽吸装置51,另一端侧比中央气体通路2ca位于径方向外侧。此处,所谓载置面的中央,是指在载置面2a中包含旋转平台2的旋转轴线p所通过的点的、靠近旋转轴线的部分。换言之,是指在载置面2a配置有电路基板m时由电路基板m所覆盖的部分。外周气体通路2cb比中央气体通路2ca位于径方向外侧。
95.中央气体配管53a将抽吸装置51与旋转平台2内的中央气体通路2ca予以连接。而且,外周气体配管53b将抽吸装置51与旋转平台2内的外周气体通路2cb予以连接。中央气体配管53a构成将抽吸装置51与旋转平台2内的中央气体通路2ca相连的中央抽吸路的一部
分。外周气体配管53b构成将抽吸装置51与旋转平台2内的外周气体通路2cb相连的外周抽吸路的一部分。
96.例如,若基板的翘曲大,则将基板配置于载置面时,基板的外周部分容易与载置面之间形成间隙。因此可认为,在基板的外周部分的抽吸路中,无法充分地抽吸基板。另一方面,本实施方式中,对流经中央抽吸路的位于旋转平台支撑部3内的部分的气体的流量进行检测。基板的中央部分较之基板的外周部分,将基板配置于载置面时的基板与载置面的间隙较小。由此,流经中央气体通路2ca内的气体的流量难以达到规定值以上。因此,通过对流经中央抽吸路的位于旋转平台支撑部3内的部分的气体的流量进行检测,可提高基板的检测精度。
97.再者,进气装置51也可分别设于中央气体配管53a与外周气体配管53b。但是,通过将进气装置51连接至中央气体配管53a与外周气体配管53b这两者,可实现省空间化。
98.(其他实施方式)
99.以上,对本发明的实施方式进行了说明,但所述实施方式不过是用于实施本发明的例示。因而,并不限定于所述的实施方式,可在不脱离其主旨的范围内对所述的实施方式进行适当变形而实施。
100.所述实施方式中,非接触检测部7包含光传感器71及激光光传感器72这两种传感器。然而,非接触检测部也可仅包含光传感器或激光光传感器的其中一种。此时,只要利用其中一种传感器来确认旋转平台的载置面上的电路基板的有无,并检测所述电路基板的检查位置附近的浮起量即可。而且,非接触检测部也可包含光传感器、激光光传感器以外的种类的传感器。非接触检测部也可包含三个以上的非接触传感器。
101.只要可如第二实施方式那样通过流量检测部来高精度地检测基板的配置状态,则也可省略借助非接触检测部的检测。
102.所述实施方式中,对与旋转平台2的载置面2a上的电路基板m的检测相关的示例进行了说明。在使电路基板m载放于旋转平台2的载置面2a上时,也可使用移送装置,一边控制电路基板m的姿势一边使其移动。图7是表示使用移送装置102来将电路基板m载置于旋转平台2的载置面2a上的情况的示意图。
103.如图7所示,基板检查单元101具有移送装置102、基板检查装置1、姿势修正控制部103以及姿势检测部104。基板检查装置1具有与所述实施方式的基板检查装置1同样的结构。因而,省略基板检查装置1的说明。
104.移送装置102从收容有多个电路基板m的基板收容部c中取出电路基板m,并移送至基板检查装置1。移送装置102例如为多关节机械臂装置。即,移送装置102在前端部具有保持电路基板m的保持部102a。保持部102a从下方保持电路基板m。
105.姿势检测部104位于移送装置102的前端部。姿势检测部104对移送装置102的保持部102a所保持的电路基板m的姿势进行检测。姿势检测部104例如为摄影机。
106.姿势修正控制部103对应于由姿势检测部104所检测出的电路基板m的姿势,来控制移送装置102的姿势。具体而言,姿势修正控制部103为了将电路基板m修正为可配置于基板检查装置1的旋转平台2的载置面2a上的规定位置的姿势,而控制移送装置102的姿势。
107.根据以上的结构,在通过移送装置102来移送电路基板m时,可将电路基板m的姿势修正为容易载置于旋转平台2的载置面2a上的规定位置的姿势。因而,在将电路基板m暂时
载置于旋转平台2的载置面2a上之后,不再需要大幅修正电路基板m的姿势。因此,实现电路基板m的检查时间的缩短。
108.基板检查单元101包括:移送装置102,可将电路基板m移送至旋转平台2,且在将电路基板m移送至旋转平台2时可变更电路基板m的姿势;以及姿势修正控制部103,通过控制移送装置102的驱动,从而将电路基板m的姿势修正为可配置于旋转平台2的规定位置的姿势。
109.根据所述结构,在将电路基板m配置于旋转平台2上之前,对电路基板m的姿势进行修正,因此不再需要如以往那样用于电路基板m的姿势变更的空间。而且,可缩短电路基板m的检查的节拍时间(takt time)。
110.基板检查单元101还包括姿势检测部104,所述姿势检测部104对由移送装置102所移送的电路基板m的姿势进行检测。姿势修正控制部103基于姿势检测部104对电路基板m的姿势检测结果,来修正电路基板m的姿势。
111.根据所述结构,可精度更好地检测由移送装置102所移送的电路基板m的姿势。由此,可将电路基板m更高精度地配置于旋转平台2上的规定位置。
112.姿势检测部104也可通过对由移送装置102所移送的电路基板m的被检测部进行检测,从而检测电路基板m的姿势。姿势修正控制部103也可基于姿势检测部104对电路基板m的姿势检测结果来修正电路基板m的姿势,从而将由姿势检测部104所检测出的所述被检测部定位至旋转平台2的基准位置。由此,可将电路基板m高精度地配置于旋转平台2的规定位置。
113.移送装置102是具有多个关节部的多关节机械臂装置。所述多关节机械臂装置将电路基板m以从下方支撑的状态而移送至旋转平台2。使用多关节机械臂装置,以从下方捧起的状态来移送电路基板m,由此,可防止尘埃附着于电路基板m。
114.本发明例如可利用于用来检查电路基板的检查装置。
115.符号的说明
116.1:基板检查装置
117.2:旋转平台
118.2a:载置面
119.2b:吸附孔
120.2c:气体通路
121.3:旋转平台支撑部
122.4:驱动部
123.5:吸附机构
124.6:检查部
125.7:非接触检测部
126.8:控制部
127.51:抽吸装置
128.52:流量检测部
129.53:气体配管
130.54:抽吸路
131.61:探针单元(接触检查部)
132.62:检查本体部
133.71:光传感器(电路基板非接触检测部)
134.72:激光光传感器(高度位置非接触检测部)
135.81:流量判定部
136.82:电路基板位置判定部
137.83:电路基板高度判定部
138.84:检查控制部
139.85:警报输出部
140.101:基板检查单元
141.102:移送装置
142.103:姿势修正控制部
143.104:姿势检测部
144.m:电路基板
145.p:旋转轴线
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。