技术特征:
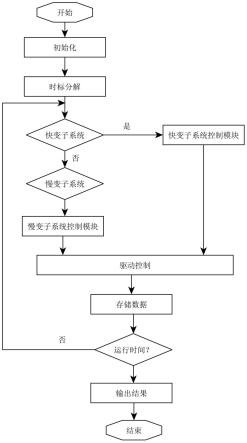
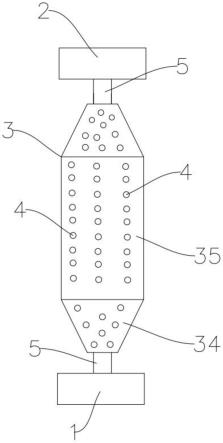
1.一种基于分散神经网络的柔性基、柔性臂奇异摄动控制方法,其特征在于,包括如下步骤:s1,建立柔性基、柔性臂空间机器人系统动力学模型;s2,建立基于奇异摄动的柔性基、柔性臂空间机器人系统动力学模型,包括慢变子系统动力学模型和快变子系统动力学模型,先忽略快变时标变量以降低系统维度,再引入边界层修正项提高模型的逼近程度,实现对柔性基、柔性臂空间机器人系统的降阶处理;s3,设置双重时间尺度控制器,包括快变子系统控制器和慢变子系统控制器;s4,判断柔性基、柔性臂空间机器人系统是否为快变子系统;若为是,采用快变子系统控制器执行控制;若为否,则判定其为慢变子系统,采用慢变子系统控制器执行控制;将两个子系统控制器的输出输入至后续驱动器,数据存储后,接着判断是否到达运行时间,若为否,则继续执行循环判断;若为是,则输出结果为结束。2.根据权利要求1所述的基于分散神经网络的柔性基、柔性臂奇异摄动控制方法,其特征在于,s1中柔性基、柔性臂空间机器人系统的动力学方程为:其中,为系统的对称、正定惯性矩阵;为系统的科氏力与离心力向量;q
s
=[θ0,θ1,θ2]
t
为系统的刚性广义坐标;q
f
=[x
b
,δ1,δ2]
t
为系统的柔性广义坐标;k
f
=diag(k
b
,k1,k2)为柔性系统的刚度矩阵,τ=[u0,u1,u2]
t
为系统的控制输入,u0为载体姿态等效调节力矩,u
i
(i=1,2)为关节驱动器a
i
的控制力矩。3.根据权利要求2所述的基于分散神经网络的柔性基、柔性臂奇异摄动控制方法,其特征在于,s2中基于奇异摄动对系统动力学模型进行降阶处理,得到表征载体姿态镇定、机械臂关节轨迹跟踪的慢变子系统和表征基座弹性变形、机械臂柔性振动的快变子系统。4.根据权利要求3所述的基于分散神经网络的柔性基、柔性臂奇异摄动控制方法,其特征在于,s2具体包括如下子步骤:s21,建立慢变子系统动力学模型;定义抗弯刚度矩阵k
f
中较小元素为k
min
、奇异摄动因子为ε=(1/k
min
)
1/2
;引入新的状态变量ξ
f
、k
ε
(ε2ξ
f
=q
f
,k
ε
=ε2k
f
),得到慢变子系统的动力学方程为:其中,为当ε=0时与{
··
}相对应的量;s22,建立快变子系统动力学模型;引入快变时标t
f
(εt
f
=t-t0)与边界层修正项得到快变子系统的动力学方程为:
其中,τ
f
为快变子系统的控制输入;为快变子系统的控制输入;为快变子系统的控制输入;s23,组合慢变子系统动力学模型与快变子系统动力学模型得到柔性基、柔性臂空间机器人系统的奇异摄动模型。5.根据权利要求4所述的基于分散神经网络的柔性基、柔性臂奇异摄动控制方法,其特征在于,s3具体包括如下子步骤:s31,设置慢变子系统控制器;将慢变子系统进一步分解为如下三个耦合子系统:将慢变子系统进一步分解为如下三个耦合子系统:其中,q
si
、与依次为向量q
s
、与的第i(i=1,2,3)个分量;与依次为矩阵与的第ij个分量;令x
i
=[x
i1
,x
i2
]
t
=[q
si
,υ
si
]
t
,则式(15)改写为其中,其中,定义与g
i
(q
ri
)的理想神经网络逼近模型依次为与g
i
(q
ri
,w
ig
),慢变子系统的分散神经网络轨迹跟踪控制器设置为:变子系统的分散神经网络轨迹跟踪控制器设置为:其中,和依次为和的估计值,与为估计误差;θ为正常数;与依次为f
i
(q
i
,υ
i
)、g
i
(q
i
)及交联项的神经网络估计值;s32,设置快变子系统控制器;基于状态变量负反馈进行控制,设置pd反馈控制器为:τ
f
=-k
f
ζ
ꢀꢀꢀ
(74)
其中,k
f
∈r3×6为增益矩阵;s33,将快变子系统控制器与慢变子系统控制器组合;根据多重时间尺度理论,将s32、s31得到的子系统控制器相结合得到柔性基、柔性臂空间机器人系统的组合控制器为:
技术总结
本发明提供了一种基于分散神经网络的柔性基、柔性臂奇异摄动控制方法,包括如下步骤:建立系统动力学模型;建立基于奇异摄动的系统动力学模型,包括慢变子系统动力学模型和快变子系统动力学模型,实现对柔性空间机器人系统的降阶处理;设置双重时间尺度控制器,包括快变子系统控制器和慢变子系统控制器;判断系统为快变子系统或慢变子系统,执行驱动控制。本发明采用了奇异摄动技术,柔性空间机器人系统被降阶为不同时间尺度下的两个独立子系统,从而简化了系统模型结构、降低了控制设计的难度与复杂度,提升了通用性、跟踪进度和稳定程度。跟踪进度和稳定程度。跟踪进度和稳定程度。
技术研发人员:雷荣华
受保护的技术使用者:湖南工商大学
技术研发日:2022.08.19
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。