1.本发明属于海洋激光雷达技术领域,尤其是涉及一种基于解析模型的海洋激光雷达多次散射衰减校正方法。
背景技术:
2.激光雷达技术能够探测水体光学特性(如吸收特性和散射特性等)的垂直分布,是获取水体生物组分信息的重要手段,在全球海洋生态系统立体观测和生物地球化学以及海洋碳循环的研究中发挥重要作用。
3.如公开号为cn113219496a一种星载海洋大气参数激光雷达探测系统,包括:激光雷达信息获取模块、探测试验模块、水层衰减系数获取模块、后向散射系数获取模块、中央控制模块、总吸收系数获取模块、反演参数模型构建模块、相对误差模型构建模块、最优双波长确定模块、激光雷达探测模块。该系统使用双波长海洋高光谱分辨率激光雷达进行探测,获取激光雷达的信息以及通过探测得到水层衰减系数、后向散射系数,从而实现总吸收系数的获取;择优选取海洋激光雷达的两个波长,提高叶绿素和cdom吸收系数的反演精度,可以实现大范围的探测海洋上空的大气温度、湿度、密度参数分布信息的准确获取。
4.然而,在海水介质中,激光的传输伴随着复杂的多次散射过程。在多次散射效应的作用下,激光雷达有效衰减系数与水体光学特性之间的关系将变得复杂,这使得激光雷达反演水体光学特性的精度受到很大影响。
5.现有研究表明,在假定激光雷达有效衰减系数为常数的情况下,当水体的光束衰减系数与接收视场的海面脚斑半径之间的乘积大于5时,激光雷达有效衰减系数将趋近于漫射衰减系数。然而在实际探测中,由于激光脉冲受多次散射效应影响,在时间和空间上均会发生展宽,即便在均匀水体中,不同水深处的激光雷达有效衰减系数也并不一致。简单将其等同于漫射衰减系数会给水体光学特性垂直剖面的反演带来不可忽视的误差。
6.因此,亟需发展一种能够校正多次散射对不同深度处激光雷达有效衰减系数影响的方法,从而实现水体光学特性剖面的准确反演,提升激光雷达对于海洋水体的探测能力,增进对全球海洋光学特性的认知。
技术实现要素:
7.针对现有海洋激光雷达中多次散射效应影响水体光学特性垂直剖面反演精度的问题,本发明提供了一种基于解析模型的海洋激光雷达多次散射衰减校正方法,能够大幅提高船载激光雷达反演水体光学特性剖面的精度。
8.一种基于解析模型的海洋激光雷达多次散射衰减校正方法,包括:
9.(1)根据激光雷达系统参数,基于准单次散射小角度近似理论,构建海洋激光雷达的辐射传输解析模型,用于模拟得到激光雷达回波信号;
10.(2)设置多组不同的海水固有光学特性iops参数,分别固定吸收系数a和散射系数b,利用步骤(1)中的辐射传输解析模型模拟得到相应的激光雷达回波信号;
11.(3)求解步骤(2)中不同信号的激光雷达有效衰减系数k
lidar
,分析水体参数对于激光雷达有效衰减系数的影响;拟合激光雷达有效衰减系数k
lidar
与水体固有光学特性iops及水深z之间的数值关系,确定k
lidar-iops-z的数值模型表达式;
12.(4)利用k
lidar-iops-z数值模型拟合不同水体光学特性下的模型未知参数m1、m2、m3;将m1、m2、m3考虑为后向散射系数bb的函数,计算不同水体对应的m1、m2、m3与bb之间的关系;
13.(5)设置非均匀水体验证组,对k
lidar-iops-z数值模型进行验证,对比仿真的衰减系数与模型拟合的衰减系数,计算两者之间的相关性,确保k
lidar-iops-z数值模型的有效性;
14.(6)对不同体制的激光雷达实测信号进行反演,计算激光雷达有效衰减系数k
lidar
及水体后向散射系数bb;针对高光谱分辨率激光雷达和米散射激光雷达分别采用hsrl反演方法和fernald反演方法;
15.(7)利用反演所得的有效衰减系数k
lidar
及后向散射系数bb,代入k
lidar-iops-z的数值模型,计算水体的吸收系数a;
16.(8)基于反演所得的水体吸收系数a与后向散射系数bb,结合水体固有光学特性iops与漫射衰减系数kd之间的经验关系,计算水体的漫射衰减系数kd。
17.本发明中,基于准单次散射小角度近似方法构建海洋激光雷达辐射传输解析模型,模拟不同水体环境和激光雷达硬件条件下的回波信号。构建激光雷达有效衰减系数与雷达参数和水体固有光学特性之间的数值关系,并利用漫射衰减系数系数的经验表达式构建多次散射衰减校正方法。根据海洋激光雷达的探测体制,选择不同的反演算法计算随深度分布的激光雷达有效衰减系数,利用激光雷达有效衰减系数数值模型反演水体固有光学特性,消除多次散射效应在深度上的影响,获得高精度的水体光学特性垂直剖面。
18.进一步地,步骤(1)中,模拟得到激光雷达回波信号的公式为:
[0019][0020]
其中,p(z)代表深度z处的激光雷达回波信号,w0代表发射激光光强,bz代表了深度z处的水体散射系数,v代表水中的光速,βb(z,|n'-n”|)代表后向散射相函数,i
src
(z,r,n')和i
rec
(z,r,n”)分别代表光源和接收器在点(z,r)处的辐射角谱分布,其中接收器为虚拟光源。
[0021]
步骤(3)中,k
lidar-iops-z的数值模型表达式如下:
[0022][0023]
其中,m1、m2、m3为参数项,z为水体的深度。
[0024]
步骤(4)中,k
lidar-iops-z数值模型中的系数m1、m2、m3与后向散射系数bb之间的关系如下所示:
[0025]
m1=f1(bb);m2=f2(bb);m3=f3(bb)。
[0026]
步骤(6)中,针对高光谱分辨率激光雷达,采用hsrl反演方法,通过混合通道和分子通道的信号求解水体后向散射系数bb和激光雷达有效衰减系数k
lidar
,如下所示:
[0027][0028][0029]
其中,χ为转换因子,tb为透射率,pc(z)为激光雷达的混合通道信号,pm(z)为激光雷达的分子通道信号,b
bw
为水分子的后向散射系数。
[0030]
针对米散射激光雷达,采用fernald方法求解激光雷达有效衰减系数k
lidar
与水体后向散射系数bb,如下式所示:
[0031][0032][0033]
其中,p(z)为激光雷达的回波信号,k
lidar,w
为水分子有效衰减系数,k
lidar,p
为颗粒有效衰减系数,r为颗粒物激光雷达比r
p
与水分子激光雷达比rw的比值,zc代表边界深度,p0(z)为稳定信号项,β
π0
为稳定180
°
体散射系数,φ(z)如下所示
[0034][0035]
步骤(7)中,吸收系数的反演公式如下所示:
[0036][0037]
其中,a为水体吸收系数,bb为后向散射系数,m1、m2、m3为k
lidar-iops-z数值模型中的系数,与后向散射系数bb之间有关。
[0038]
步骤(8)中,计算水体的漫射衰减系数kd的公式如下:
[0039]
kd=a 4.18(1-0.52e-10.8a
)bb。
[0040]
与现有技术相比,本发明具有以下有益效果:
[0041]
1、本发明利用海洋激光雷达辐射传输方程与准单次小角度近似理论,构建了激光雷达回波信号的解析模型,能够设置不同的激光雷达系统参数,仿真多种水体的回波信号,计算相应的有效衰减系数,并进一步反演水体吸收系数a、后向散射系数bb和漫射衰减系数kd。
[0042]
2、本发明建立了k
lidar-iops-z数值模型,能够消除多次散射效应在深度上对激光雷达回波信号有效衰减系数的影响,提升了海洋激光雷达对水体吸收系数a和漫射衰减系数kd的反演精度。
[0043]
3、本发明能够应用于多种探测机制的海洋激光雷达系统,可针对实际测量情况选择合适的反演算法,从而获取高精度的水体光学特性剖面。
附图说明
[0044]
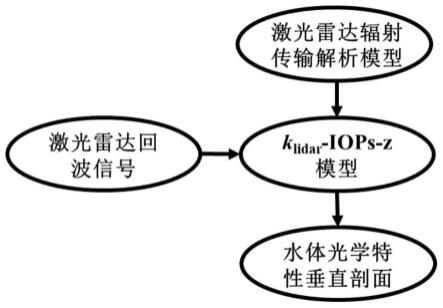
图1为本发明一种基于解析模型的海洋激光雷达多次散射衰减校正方法的流程示意图;
[0045]
图2为本发明实施例中船载激光雷达数据的测量站点;
[0046]
图3为本发明实施例中反演的水体吸收系数分布图;
[0047]
图4为本发明实施例中反演的水体漫射衰减系数分布图。
具体实施方式
[0048]
下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
[0049]
一种基于解析模型的海洋激光雷达多次散射衰减校正方法,利用klidar-iops-z模型去除多次散射对于激光雷达回波信号有效衰减系数的影响,实现多种水体光学特性的精确反演。
[0050]
具体流程如图1所示,基于准单次小角度散射近似,搭建船载海洋激光雷达解析模型,仿真不同水体环境下的激光雷达回波信号,建立理论有效衰减系数、水体固有光学特性、水深之间的数值模型,即k
lidar-iops-z数值模型,利用这一模型消除多次散射效应对于有效衰减系数的影响,反演水体固有光学特性,并进一步反演不同深度处的水体漫射衰减系数。
[0051]
图2展示了船载激光雷达数据的探测站点,激光雷达的测量高度为5m,接收器的视场直径和视场角分别为50.8mm和200mrad,探测时的倾斜角为40
°
。
[0052]
通过以下步骤实现基于解析模型的海洋激光雷达水体光学特性反演:
[0053]
第一步,构建船载海洋激光雷达的解析模型,计算对应的雷达回波信号强度,根据准单次小角度散射近似求解水深z处的激光雷达回波信号,如下式所示:
[0054][0055]
其中,z为水体深度,w0为激光雷达的激光光强,bz为z处的散射系数,v为水中的光速,βb(z,|n'-n”|)为后向散射相函数,设置为ff相函数,i
src
(z,r,n')和i
rec
(z,r,n”)为光源和接收器在点(z,r)处的辐射角谱分布,n'和n”分别为光束入射及散射方向。i
src
(z,r,n')和i
rec
(z,r,n”)可分别通过单位光源的空间角分布和接收器(虚拟光源)的空间角分布进行计算。
[0056]
第二步,仿真不同水体光学特性对应的激光雷达回波信号,考虑水体为均匀水体,分别固定吸收系数a和散射系数b如表1所示。利用仿真信号计算不同水体对应的激光雷达有效衰减系数,结果表明,吸收系数a仅影响激光雷达有效衰减系数的常数项,散射系数b则同时影响激光雷达有效衰减系数的形状和数值。在固定后向散射比b的情况下,将散射系数b转换为后向散射系数bb进行考虑,而后向散射系数bb能够通过激光雷达回波信号直接反演,是直观有效的数据参量。
[0057]
表1
[0058][0059]
第三步,基于对激光雷达有效衰减系数k
lidar
受水体固有光学特性影响的分析,总结k
lidar-iops-z的模型,发现k
lidar
则随深度呈现负指数分布,且水体固有光学特性决定了指数关系式的系列参数,如下式所示:
[0060][0061]
其中,m1、m2、m3为与后向散射系数bb有关的参数,z为水体的深度,a为水体的吸收系数。
[0062]
第四步,利用第三步的公式拟合表1中数组水体对应的激光雷达有效衰减系数,case1-case7对应的m1、m2、m3如表2所示。
[0063]
表2
[0064][0065]
可见m1、m2、m3的数值仅与bb相关,而不受吸收系数影响。总结m1、m2、m3与bb之间的关系,如下式所示:
[0066]
m1=-12.37
×bb-0.0003383
[0067][0068]
m3=11.85
×bb
0.001378
[0069]
第五步,设置数组验证组水体如表3所示,利用解析模型仿真相应的理论回波信号,计算对应的有效衰减系数,同时依据第四步的公式拟合该水体参数下的理论衰减系数。针对船载海洋激光雷达系统,仿真衰减系数与拟合衰减系数之间的相关性达到了0.995,这证明k
lidar-iops-z的经验模型具有良好的可靠性。
[0070]
表3
[0071][0072]
第六步,根据船载激光雷达的探测机制,反演激光雷达有效衰减系数k
lidar
及水体后向散射系数bb。针对实施例,采取hsrl反演方法,利用下式计算不同水深处的后向散射系数bb和激光雷达有效衰减系数k
lidar
。
[0073][0074][0075]
式中,χ为转换因子,tb为透射率,pc(z)为激光雷达的混合通道信号,pm(z)为激光雷达的分子通道信号,b
bw
为水分子的后向散射系数。
[0076]
第七步,利用k
lidar-iops-z经验模型,通过反演得到的有效衰减系数k
lidar
及后向散射系数bb,计算水体的吸收系数,如下式所示:
[0077][0078]
式中的m1、m2、m3依据反演所得的后向散射系数bb和第四步的理论关系式进行计算,反演的吸收系数a如图3所示。
[0079]
第八步,利用反演得到的水体吸收系数a与后向散射系数bb,计算水体的漫射衰减系数kd,如下式所示:
[0080]
kd=a 4.18(1-0.52e-10.8a
)bb[0081]
实施例kd的计算结果如图4所示,相较于直接将激光雷达有效衰减系数视为kd,采用计算的结果与原位值之间的相对误差能够降低60%。这对于海水理化特性分析具有重要意义,能够帮助更加准确的计算水下光场分布、推演水体组分、认知海洋水体。
[0082]
本发明利用准单次小角度近似理论构建了船载海洋激光雷达回波信号的仿真模型,建立了相应的k
lidar-iops-z数值模型,能够反演吸收系数a、后向散射系数bb和水体漫射衰减系数kd,其反演结果与原位值之间具有良好的一致性,表明了本发明的可靠性。
[0083]
以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
