1.本发明涉及无人飞行平台技术领域,具体为一种微波能量驱动的高空超长航时大展弦比一体化无人飞行平台。
背景技术:
2.在对一定区域范围的连续不间断监控和侦察,执行应急救援过程中的地面信息监控以及信号中继等任务中,高空长航时无人飞行平台是关键的实现方案。
3.目前主流的高空长航时无人飞行平台,都是采用太阳能作为飞行平台动力来源主要的动力来源,平流层太阳能飞艇和高空长航时太阳能无人机。但尽管理论上“无限航时”,但是因为天气、纬度、昼夜对照度的影响,太阳能飞行器需要在白天利用太阳能充电,晚上降低高度利用电池维持动力飞行,提高飞行效率,电池板接收太阳能的转换效率最高也不超过30%。当对充电影响过大时,即无法维持续航飞行。另外,由于需要电池维持太阳光较弱时的飞行,电池重量几乎占到全机总重量的40%以上,严重影响了其他载荷的搭载能力,因此太阳能无人机的机体结构重量很轻。而为了尽可能铺设更多的电池板,其展弦比通常很大,带来了严峻的气动弹性问题和控制问题。可以说,尽管可使用无限的太阳能实现飞行,但是载荷能力差、控制难度高、环境因素影响大、能量转换效率低是制约该类飞行器发展的关键问题。
4.为实现无人机的超长航时稳定续航,采用微波作为无人机的动力装置能量来源成为一种新的无人平台供能方式。现在的微波能量功能无人平台相对较少,除了早期的一些飞艇和无人机之外,并没有见到较多实例。如1980年,加拿大开展了名为sharp(stationary high altitude relay program)的研究,该研究中设计了一款重量为4.1kg的无人机,该无人机在10kw地面发射天线的驱动下持续飞行了20分钟,验证了这种能量驱动方式的可行性。但些平台目前存在的主要问题是:因为接收微波能量的天线要求接收面呈现圆形平面状,当前的平台方案均是将这种接收天线直接以部件的形式安装于无人平台的本体,天线和无人机没有融合设计,这种方式尽管简单,但是带来了气动、结构和能量接收方面的种种问题,飞行平台性能极差,整个系统的效率低下。
5.气动方面:接收天线多以吊装的方式挂载无人平台的机腹,对总体的气动力特性带来了很大的破坏,主要体现在阻力急剧增大,全机的操稳特性也会因为产生明显的变化,这对利用电能驱动螺旋桨的高空长航时无人机来讲是一种极大的干扰,严重恶化了最终的平台性能。
6.结构方面:由于存在整流电路板,接收天线相对密度较大,因而总重量较大,尤其是对能量要求较高的大型无人飞行平台上,大面积的整流结构天线带来的重量极有可能抵消这种供能形式的收益。另外,由于天线尺寸较大,因此飞行过程中带来的气弹和振动效应明显。
7.能量接收方面:整流电路单独吊装在无人平台后,飞行过程中受载,容易产生结构变形,导致整流接收单元产生位移和相位偏差,影响波束收集效率。
技术实现要素:
8.为解决现有技术存在的问题,实现工作在18km的高空太阳能无人飞行平台的稳定续航,本发明提出一种微波能量驱动的高空超长航时大展弦比一体化无人飞行平台,在保证能量接收效率的前提下,通过地面辐射微波能量,利用机载一体化整流接收天线接收射频能量并转换为直流电能,驱动无人平台飞行并执行任务,消除外露天线带来的气动结构和能量接收方面的问题,提高整个平台的效率,理论上可以真正实现无限长航时飞行。
9.本发明的技术方案为:
10.所述一种微波能量驱动的高空超长航时大展弦比一体化无人飞行平台,采用大展弦比翼身融合布局,在翼梢增加翼梢小翼;作为全机动力装置来源的整流接收天线与全机气动和结构一体化设计,从外形上保证了全机的气动特性;一体化整流接收天线位于机身下部位置,且整个接收区域呈现平面形状以保证整流接收单元的效率;整流接收天线布置区域的翼身融合部位翼型采用下表面平坦、升阻比满足要求的翼型,且采用后加载形式;无人飞行平台尾撑后置倒v尾来布置相应的舵面,并通过v尾实现全机配平;电动螺旋桨作为动力装置位于机身对称面后上方。
11.进一步的,采用大展弦比翼身融合布局,全机翼展30m,展弦比20,机翼面积45m2,整流天线面积为15.918m2;全机沿展向无扭转;
12.整流接收天线位于翼身融合部位,翼身融合截面的翼型为升阻比满足设定要求的高升阻比翼型,最大相对厚度为12.0044%,最大厚度位置位于弦长30%处,下表面适配天线要求,有相应长度的直线段;
13.整流接收天线呈圆形平面,直径为4.502m,圆心距离机头位置为3.015m处,一体化整流天线由蒙皮、上下层泡沫、整流天线元器件封装而成。
14.3、根据权利要求1或2所述一种微波能量驱动的高空超长航时大展弦比一体化无人飞行平台,其特征在于:
15.无人飞行平台尾撑杆长度为6m,尾撑后置倒v尾来布置相应的舵面,每片v尾的面积1.8375m2,其后缘40%的面积为舵面,展长为2.5m,弦长为0.3m,用来进行纵、横航向的姿态控制;副翼位于机翼外侧,展长为3.5m,弦长为0.15m,和v尾一同参与横向姿态控制。
16.进一步的,在翼梢增加翼梢小翼,翼稍小翼翼型为naca0012翼型。
17.进一步的,采用两叶电动尾推桨作为动力装置,桨叶采用s1223叶素翼型,桨根到桨尖扭转角为60度,桨叶直径为2.5m。
18.进一步的,采用前三点式起落架,其中前起落架因受下表面天线的影响,而采用向上收起到机身上表面舱内的收起方式,主起落架采用向前收到飞行平台下表面的起落架舱内的收起方式。
19.有益效果
20.现有的微波传能无人飞行平台均采用了在机体平台后加装微波接收天线部件的方式形成微波动力驱动飞行平台,由于超远距离传输飞行时,从地面发射端到接收转化为直流的整体效率并不高,而加装天线带来的重量和阻力使得该方案的适用性和可拓展性受到了极大的限制。
21.与现有的平台相比,本发明将接收整流天线作为全平台的设计约束综合考虑,形成融合式的一体化设计方案,整流接收作为平台外形的一部分完整嵌入机体,并且从结构
设计方面实现与机体外表面的高度一致。这种设计方法能够在保证接收整流天线效率和电性能的前提下,大幅度提高微波能量驱动的无人飞行平台的气动特性,基本消除了加装天线后带来的阻力效应问题,并同时实现了不显著增加全平台结构重量,提高了全机的效能。本发明的设计思路和平台外形方案能够更好的适用于高空(≥18km)超长航时无人飞行器的需求。
22.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
23.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
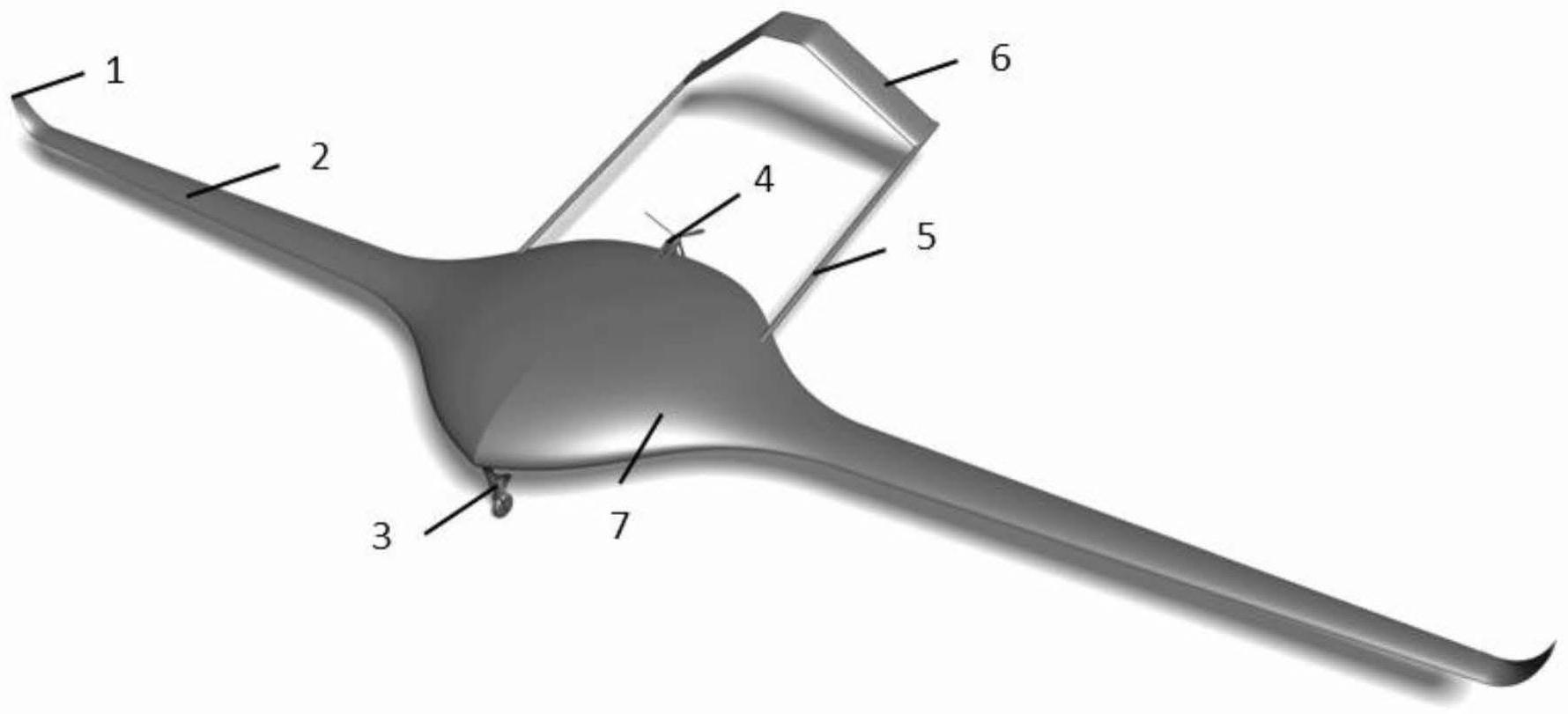
24.图1:大展弦比一体化无人飞行平台全局视图;
25.图2:大展弦比一体化无人飞行平台三视图;
26.图3:大展弦比一体化无人飞行平台接收天线位置视图和天线视图;
27.图4:大展弦比一体化无人飞行平台整流接收天线结构示意图;
28.其中:标号1为翼梢小翼,标号2为外翼段,标号3为前起落架,标号4为电动螺旋桨推进系统,标号5为尾撑杆,标号6为倒v尾,标号7为内翼段(翼身融合段),标号8为副翼,标号9为v尾舵面,标号10为一体化接收整流天线,标号11为天线和平台的融合连接结构;
29.图5:一体化整流接收天线接收区域机翼翼型外形图;
30.图6:h=18km的气动力特性;(a)升力系数,(b)阻力系数,(c)升阻比,(d)俯仰力矩系数;
31.图7:h=18km时的流场;(a)2度攻角,(b)3度攻角,(c)6度攻角,(d)10度攻角,(e)12度攻角;
32.图8:接收天线反射系数;
33.图9:接收天线轴比;
34.图10:接收天线3d辐射方向图;
35.图11:接收天线xoz面辐射方向图;
36.图12:接收天线yoz面辐射方向图。
具体实施方式
37.为了实现超长航时的高空无人飞行,本发明提出了一种基于微波能量传输驱动的一体化高空长航时无人平台,如图1所示,该平台采用大展弦比翼身融合布局,在翼梢增加翼梢小翼以进一步减小诱导阻力。作为全机动力装置来源,整流接收天线与全机气动和结构一体化设计,从外形上保证了全机的气动特性,而由于整流接收天线采用与机体表面结构类似的蒙皮、泡沫等复合设计形式,两者可以达到结构上的高度统一和融合,具有相近的力学特性,因而可以作为一个整体来考虑其承载特性,有效避免了外部整流天线加装后的结构重量特性差的弊端。
38.实际设计加工时,从整体一体化的角度进行考虑整流天线的全平台设计,充分考虑各个总体、气动、结构等参数的传递性和关联性,而进入详细设计阶段,即可以采用一体
化平台约束下的分部件设计以加快迭代流程。通过一体化的思路分解约束条件和设计指标,在平台和天线上进行交互设计,最终实现了一体化下的模块化研发,整流天线以一体化模块的形式与平台结合,也即通过简单的连接关系即可将天线与平台完整的组成一个整体系统。
39.一体化整流接收天线位于机身下部位置,并且整个接收区域呈现平面形状以保证整流接收单元的效率,该部分的机翼翼型采用高升力翼型,外形如图5所示,尽管下表面平坦,但是采用了后加载的形式后,气动效率依然较高,有效兼顾了天线形式和升力特性需求。尾撑后置倒v尾主要用来布置相应的舵面,并且通过v尾实现全机的配平。电动螺旋桨位于机身对称面后上方,减少机身对螺旋桨气流的遮挡。
40.本发明提出的基于微波能量传输驱动的一体化高空长航时无人平台整体特征如下:
41.1)全机翼展30m,展弦比20,设定的大展弦比可以保证低速高空飞行的气动效率;当然,根据性能的要求对展弦比进行进一步的优化和修改,该参数与一体化接收天线的供能相关,因此根据相应要求进行优化设定。
42.2)机翼面积45m2,整流天线面积为15.918m2,面积占比根据能量需求确定;
43.3)翼身融合截面的翼型为升阻比满足设定要求的高升阻比翼型,最大相对厚度为12.0044%,最大厚度位置位于弦长30%处,下表面适配天线要求,有相应长度的直线段;翼稍小翼翼型为常规naca0012翼型,主要用来减小诱导阻力,提高全机气动效率;全机沿展向无扭转,当然,可以根据性能要求对翼型的选择进行进一步优化适配;
44.4)一体化整流天线呈圆形平面,直径为4.502m,圆心距离机头位置为3.015m处,一体化整流天线由蒙皮、上下层泡沫、整流天线元器件封装而成,能量接收能力约为1km/m2,折算的巡航功率供需要求为8kw;
45.5)尾撑杆长度为6m,每片v尾的面积1.8375m2,其后缘40%的面积为舵面,展长为2.5m,弦长为0.3m,主要用来进行纵、横航向的姿态控制;
46.6)副翼位于机翼外侧,靠近翼稍小翼,其展长为3.5m,弦长为0.15m,和v尾一起参与横向操纵;
47.7)采用两叶电动尾推桨作为动力装置,桨叶采用s1223叶素翼型,桨根到桨尖扭转角为60度,桨叶直径为2.5m,当然,该桨叶可以根据推进装置需求进行进一步的优化改进;
48.8)采用前三点式起落架,前起因受下表面天线的影响向上收起到机身上表面舱内,主起向前收到下表面的起落架舱内。
49.该无人飞行平台适用于18km高空飞行,利用地面微波能量发射端向空中辐射微波能量,机载一体化天线接收微波能量后进行整流转换,将射频能量转换为直流,驱动无人平台飞行并对机载设备进行供电。下面采用基于雷诺平均navier-stokes方程的数值模拟方法对全机的气动特性进行仿真分析,验证了本设计方案的高效高升阻比特性,并通过电磁仿真验证能量传输过程的可行性和效率。
50.1)气动力仿真
51.仿真对象为本发明设计的微波传能无人飞行平台,平台翼展30m,参考面积45m2,整流天线面积为15.918m2,展弦比20。计算状态为h=18km,雷诺数仅有0.34
×
10e6,属于低雷诺数范围。因此在较小的迎角下,都可能产生分离气泡,因而采用γ-re
θ
转捩模型进行模
拟。
52.图6为计算得到的巡航速度10、20、40m/s时的气动力特性。设计的翼型后加载,整体的弯度稍大,总的升力特性比较好。升阻比特性较好,在展弦比不超过20的约束下,干净构型的最大升阻比均超过20。h=18km巡航高度时,最大升阻比可达24以上,总体来看,设计构型的气动力特性较好。由于设计了翼稍小翼,加上展弦比较大,该构型的升阻比特性相对较好。
53.俯仰力矩系数特性与选择的力矩参考点位置也即重心位置相关,重心位置根据各个部件以及相应的装载来确定。初步选择的重心位置距离机头2.5m,相应的位置靠近机头,因为此处的截面翼型厚度较大,形成的装载空间也较大。
54.2)射频能量转化仿真
55.接收单元设计采用厚度为0.5mm,介电常数为3.5、损耗角正切tanσ=0.003的h4b介质板。接收天线单元尺寸为d=15.59mm,a=30mm,w=0.5mm,s=0.15mm,l1=6.4mm,l2=3.82mm,l3=3.74mm,l4=9.75mm,l5=3.04mm,l6=3.44mm。
56.表3-2天线参数
57.d(mm)a(mm)w(mm)s(mm)l1(mm)15.59300.50.156.4l2(mm)l3(mm)l4(mm)l5(mm)l6(mm)3.823.749.753.043.44
58.通过hfss软件进行建模,通过仿真优化得到性能良好的天线结构。其中仿真的反射系数如图8所示,阻抗带宽为260mhz,在基频5.8ghz、二次谐波11.6ghz以及三次谐波17.4ghz处的反射系数分别为-20.47db、-0.69db以及-1.80db。可以较好的吸收5.8ghz的基频能量,同时可以在一定程度上抑制整流电路产生的二次以及三次谐波。
59.天线的轴比仿真曲线如图9所示。天线的轴比带宽为50mhz(5.77ghz~5.82ghz),5.8ghz处的轴比为0.79,可知天线轴比较好。
60.天线的3d方向图如图10所示,其xoz面和yoz面的方向图分别如图11和图12所示。由图可知,最大辐射方向为z方向,增益为g=6.45db,且为右旋圆极化。
61.通过仿真分析可以看出,本发明能够在保证接收整流天线效率和电性能的前提下,大幅度提高微波能量驱动的无人飞行平台的气动特性,基本消除了加装天线后带来的阻力效应问题,并同时实现了不显著增加全平台结构重量,提高了全机的效能。而且电磁仿真也验证了能量传输过程的可行性和效率。
62.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。