1.本发明涉及航空发动机叶片质检领域,特别是涉及发动机静子扇形段叶片的缺陷检测识别方法。
背景技术:
2.航空发动机是飞机的“心脏”,是决定飞机性能的主要因素。压气机作为航空发动机的关键部件,其叶片由高精度自由曲面构成,其加工精度、制造水平影响着发动机性能、安全与寿命。叶片作为进气流道的前端部件,经常受到外来物的冲击和风沙、潮湿气流的侵蚀等,产生损伤、裂纹等现象,甚至会导致叶片断裂,造成发动机损毁。目前最常采用的压气机扇形段叶片故检方法是依赖人工目视检查、佐以无损检测,随着现代航空业的不断发展,对于航空发动机的要求越加严苛,当前航空压气机扇形段叶片表面缺陷检测与表面质量评估存在的不足,主要体现在首先,目前叶片表面缺陷检测手段落后,扇形段叶片间隙狭小,比普通叶片增加了叶冠结构,许多测量设备无法进行伸入测量,叶片质量评估依赖人工目视检查,对于叶片表面质量的评估需要项目专家、设计人员、操作人员等进行大量的检验和经验判断。对于微小缺陷的风险评估完全依靠操作人员主观判断,无标准的检查规范准则,也缺乏对微小缺陷种类判定的检测手段;其次,目前无法准确定量检测缺陷尺寸,缺陷的实际状态得不到准确的检测,难以评估其缺陷对性能及安全造成的影响,使得航空发动机压气机叶片过度报废,使得一些仍旧符合质量要求的叶片不能有效的循环利用,造成不必要的经济损失。目前,基于计算机视觉的三维检测,其输出结果多为点云数据,因此,采用计算机对测量数据进行处理,从而实现对扇形段叶片表面缺陷的分类与识别,对于解放人工,减小扇形段叶片表面缺陷误检率具有重要意义,能有效避免因人员经验带来的缺陷检测差异化问题,能够加快压气机试验后数据处理效率,为发动机叶片表面缺陷提供通用定性评判标准,实现精准高效的定量检测,有效评估叶片表面缺陷对其安全及性能的影响。
技术实现要素:
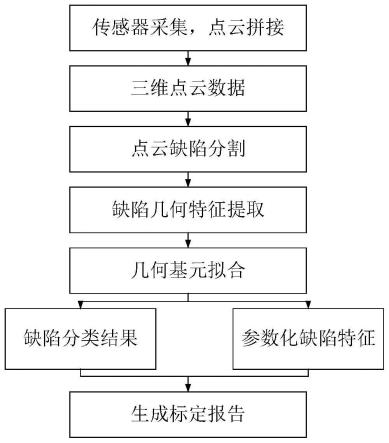
3.本发明的目的是为了克服现有技术中的不足,提供一种航空发动机扇形段叶片表面缺陷的缺陷检测与识别方法,对于扇形段叶片三维扫描得到的点云缺陷数据,进行点云拼接、点云缺陷分割、几何特征提取、几何基元拟合,最后得到扇形段叶片表面的缺陷的参数化定义,从而实现扇形段叶片表面缺陷特征的检测与提取,并根据缺陷几何特征实现对缺陷的识别与分类。
4.本发明的目的是通过以下技术方案实现的:
5.一种航空发动机扇形段叶片缺陷检测识别方法,包括以下步骤:
6.s1.通过激光三维传感器对被测扇形段叶片的前缘、后缘、根部、叶身分别进行逐列扫描获得相应的三维点云数据,通过拼接后,获取所述被测扇形段叶片的三维坐标点云数据;
7.s2.对所得三维坐标点云数据进行点云缺陷分割,基于欧氏距离法对三维坐标点
云进行分割得到点云缺陷的几何特征;
8.s3.对点云缺陷的几何特征进行拟合,分别计算点云缺陷区域的边界周长p、缺陷面积s、圆形度rc、矩形度rt、缺陷紧凑性c、区域占空比rq、缺陷矩特征和椭圆偏心率re,依据以上参数,基于dag svm缺陷分类决策树,对点云缺陷进行分类;
9.s4.经过s3分类后,任意选取点云缺陷数据,对选取点云缺陷数据进行几何基元实现对扇形段叶片的缺陷检测。
10.进一步的,步骤s2具体如下:
11.s201.基于聚类算法,进行点云缺陷边缘检测,对于点云缺陷的几何特征,其边缘表现为深度方向的坐标突变,采用空间欧式距离作为判别标准进行分类,将点云缺陷数据进行分割;
12.s202.基于梯度方向判断算法,对s201提取出的边缘进行连接,通过分析三维点云数据中的每个边缘点(x,y,z)邻域附近的每个点,划定准则,将识别出相似的点进行连接,组成完整边缘信息;
13.s203.依据s202得到完整的的边缘信息,基于目标纹理,外轮廓长度信息进行外轮廓搜索,剔除错误识别的边缘,保留唯一的点云缺陷边缘特征。
14.进一步的,步骤s4中,几何基元拟合的过程包括:基于最小二乘法的直线拟合,基于ransac的平面拟合和基于最小二乘法的圆拟合;扇形段叶片表面经试验后,产生裂纹、划伤类缺陷,针对此类缺陷,采用最小二乘法对点云缺陷数据进行直线拟合,测量出点云缺陷长度信息;对于凹坑、擦伤类缺陷,对缺陷点云数据进行ransac的平面拟合,测量平面间的距离,获得该类点云缺陷的深度信息;对于扇形段叶片叶根部分的点云缺陷,对点云缺陷数据进行最小二乘法圆拟合,测量出扇形段叶片叶根部分倒圆半径。
15.进一步的,步骤s3中:
16.(301)边界周长p;即为点云缺陷的外轮廓所占的像素点总数,(x,y)为点云坐标,r为点云数据集合;
[0017][0018]
(302)点云缺陷面积s,即为缺陷目标区域内的像素点总数;
[0019][0020]
(303)圆形度rc,下式可计算出区域的重心坐标,用以表征点云缺陷的位置;(xc,yc)为点云缺陷区域的重心坐标位置;
[0021][0022]
下式用来计算目标圆形度,ur和σr分别为区域重心到边界点的平均距离和均方差;当目标边界为圆时rc=1,否则rc《1;
[0023][0024][0025][0026]
(304)矩形度rt,设点云缺陷区域的最小外接矩形的长边长度用l
l
,短边长度用ls表示,则矩形度为:
[0027][0028]
(305)缺陷紧凑性c,
[0029][0030]
(306)区域占空比rq,定义为缺陷目标面积s与缺陷区域最小外接矩形的面积之比,即
[0031][0032]
(307)椭圆偏心率re,与缺陷区域有着相同二阶矩的椭圆的偏心率;偏心率是椭圆的焦距与主轴长度间距离的比率,其值在0和1之间;偏心率等于0和1是退化的情况:偏心率为0的椭圆是圆,偏心率为1的椭圆是线段。
[0033]
与现有技术相比,本发明的技术方案所带来的有益效果是:
[0034]
本发明方法对于扇形段叶片三维扫描得到的点云缺陷数据,进行点云拼接、点云缺陷分割、几何特征提取、几何基元拟合,最后得到扇形段叶片表面缺陷的参数化定义,从而实现扇形段叶片表面缺陷特征的检测与提取,并根据缺陷几何特征实现对缺陷的识别与分类,以具体运算公式明确了扇形段叶片缺陷分类的相关参数计算法则,达到了叶片缺陷类型的具体参数定义,采用计算机对测量数据进行处理,从而实现对扇形段叶片表面缺陷的分类与识别,对于解放人工,减小扇形段叶片表面缺陷误检率具有重要意义,能有效避免因人员经验带来的缺陷检测差异化问题,能够加快压气机试验后数据处理效率,为发动机叶片表面缺陷提供通用定性评判标准,实现精准高效的定量检测,有效评估叶片表面缺陷对其安全及性能的影响。
附图说明
[0035]
图1为本发明的一种航空发动机叶片缺陷检测识别方法的流程示意图。
具体实施方式
[0036]
以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0037]
如图1所示,本实施例提供一种航空发动机扇形段叶片缺陷检测识别方法,包括以
下步骤:
[0038]
s1.通过激光三维传感器对被测扇形段叶片的前缘、后缘、根部、叶身分别进行逐列扫描获得相应的三维点云数据,通过拼接后,获取所述被测扇形段叶片的三维坐标点云数据;
[0039]
s2.对所得三维点云数据进行点云缺陷分割,直接对三维点云进行操作,基于欧氏距离法对点云缺陷进行分割得到点云缺陷的几何特征。具体的:基于聚类算法,进行点云缺陷边缘检测。对于点云缺陷的几何特征,其边缘表现为深度方向的坐标突变,采用空间欧式距离作为判别标准进行分类,将点云缺陷数据进行分割。点云缺陷数据分割出的边缘,连续性差,基于梯度方向判断算法,对提取出的边缘进行连接,通过分析图像中的每个边缘点(x,y,z)邻域附近的每个点,划定一定准则,将识别出认为相似的点进行连接,组成完整边缘信息。依据边缘连接后得到的边缘信息,基于目标纹理,外轮廓长度信息进行外轮廓搜索,剔除错误识别的边缘,保留唯一缺陷边缘特征。
[0040]
s3.经过s2的分割后,对分割后的点云缺陷的几何特征进行拟合,分别计算点云缺陷区域的边界周长p,缺陷面积s,圆形度rc,矩形度rt,缺陷紧凑性c,区域占空比rq,缺陷矩特征,椭圆偏心率re,依据以上参数,基于dag svm缺陷分类决策树,对点云缺陷进行分类。具体的,边界周长p,缺陷面积s,圆形度rc,矩形度rt,缺陷紧凑性c,区域占空比rq,缺陷矩特征,椭圆偏心率re的定义如下
[0041]
(301)边界周长p;即为点云缺陷的外轮廓所占的像素点总数,(x,y)为点云坐标,r为点云数据集合;
[0042][0043]
(302)点云缺陷面积s,即为缺陷目标区域内的像素点总数;
[0044][0045]
(303)圆形度rc,下式可计算出区域的重心坐标,用以表征点云缺陷的位置;(xc,yc)为点云缺陷区域的重心坐标位置;
[0046][0047]
下式用来计算目标圆形度,ur和σr分别为区域重心到边界点的平均距离和均方差;当目标边界为圆时rc=1,否则rc《1;
[0048][0049]
[0050][0051]
(304)矩形度rt,设点云缺陷区域的最小外接矩形的长边长度用l
l
,短边长度用ls表示,则矩形度为:
[0052][0053]
(305)缺陷紧凑性c,
[0054][0055]
(306)区域占空比rq,定义为缺陷目标面积s与缺陷区域最小外接矩形的面积之比,即
[0056][0057]
(307)椭圆偏心率re,与缺陷区域有着相同二阶矩的椭圆的偏心率;偏心率是椭圆的焦距与主轴长度间距离的比率,其值在0和1之间;偏心率等于0和1是退化的情况:偏心率为0的椭圆是圆,偏心率为1的椭圆是线段。
[0058]
s4:经过s3分类后,为了实现对叶片缺陷的参数化定义,需要对其几何尺寸进行测量,这一步是对缺陷进行几何基元拟合,包括基于最小二乘法的直线拟合、基于ransac的平面拟合,基于最小二乘的圆拟合。
[0059]
最后需要指出的是:以上实例仅用以说明本发明的计算过程,而非对其限制。尽管参照前述实例对本发明进行了详细的说明,本领域的普通技术人员应当理解,其依然可以对前述实例所记载的计算过程进行修改,或者对其中部分参数进行等同替换,而这些修改或者替换,并不使相应计算方法的本质脱离本发明计算方法的精神和范围。
[0060]
本发明并不限于上文描述的实施方式。以上对具体实施方式的描述旨在描述和说明本发明的技术方案,上述的具体实施方式仅仅是示意性的,并不是限制性的。在不脱离本发明宗旨和权利要求所保护的范围情况下,本领域的普通技术人员在本发明的启示下还可做出很多形式的具体变换,这些均属于本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。