1.本发明属于生物实验设备技术领域,具体涉及一种灵长类动物实验智能约束装置。
背景技术:
2.在医药研究和教学实验中常要用到灵长类动物进行试验,为防止灵长类动物躁动防碍试验,可以将目标动物麻醉后进行操作,但是麻醉动物不仅专业性要求较高,而且麻醉状态也会制约神经学科类动物试验的过程、影响试验的结果。进行非麻醉状态的动物试验,在灵长类动物实验中,为方便实验的进行,通常需要采用约束装置对动物进行固定,方便进行抽血和采集呼吸等操作,在约束装置的使用中,通常会将约束结构固定在机架上,然而现有的机架在使用时存在以下问题:一是现有约束结构的安装机架无法调节高度,对实验人员的实验造成一定干扰,二是现有的约束结构仅仅将动物的四肢和头部进行固定,但灵长类动物关节连接处的自由度较高,灵长类动物在四肢被束缚时仍然可以通过各个骨骼关节晃动身体,影响动物实验,三是在需要对灵长类动物前胸和后备进行相关实验时需要将灵长类动物解绑后翻身再次进行捆绑,增加实验难度,同时灵长类动物激烈反抗后体内激素会发生变化影响对实验结结果成干扰,特别是动物的脑电波观测实验。
技术实现要素:
3.本发明的目的在于通过转动铰接模块使得铰接部端面始终朝上,防止翻转时约束模块对折,通过约束模块将动物进行双次束缚,减少实验干扰,降低操作强度的灵长类动物实验智能约束装置。
4.基于上述目的,本发明采用如下技术方案:一种灵长类动物实验智能约束装置,包括床体,所述床体上设有翻转模块,翻转模块包括设在床体两侧的翻转座,还包括设在翻转座之间的提升模块,提升模块设在床体上并与翻转座滑动配合,提升模块上设有约束模块,约束模块包括与提升模块磁力连接的板状约束基板,约束基板两端设有与翻转座连接的基板固定机构,约束基板上还设有束缚模块;约束基板分为三部分并通过设置的转动铰接模块连接,转动铰接模块包括设在约束基板内的动力模块,还包括与动力模块连接的铰接部,铰接部包括铰接的左摆杆和右摆杆,左摆杆和右摆杆呈凸台状。
5.优选的,约束基板包括板状头部基板,头部基板左侧端内部设有插拔孔,头部基板还包括设在插拔孔内的基板固定机构,基板固定机构包括设在插拔孔内的自锁式插拔杆,自锁式插拔杆一端设有固定公壳,固定公壳为方形凹槽且其内设有基板詹式钩;头部基板中部设有椭圆状头部通孔,头部基板上、下端面设有与头部通孔连接的滑槽,滑槽沿头部通孔长轴延伸到头部基板右侧端,头部通孔内侧面设有环绕一周的气囊,气囊内侧面设有头部束缚部,头部束缚部沿滑槽滑动,头部基板内设有与气囊连通的微型气泵,头部基板内还设有与提升模块连接的磁体模块;头部基板右侧设有转动铰接模块,转动铰接模块包括设在头部基本内的安装槽,安装槽顶端设有伺服电机,还包括与伺服电机连接的转动杆,转动
杆上背离伺服电机端设有方形左摆杆,左摆杆上端一体化设有限位台,还包括与左摆杆铰接的右摆杆,右摆杆上端一体化设有限位台,限位台与头部基板上端面共面,右摆杆右侧面设有自锁式插拔杆。
6.优选的,头部束缚部包括头盔壳体和调节模块,头盔壳体外侧面设有主动防干扰模块,主动防干扰模块包括多个正交连接的亥姆霍兹线圈,亥姆霍兹线圈设在头盔壳体外表面上,亥姆霍兹线圈在头盔壳体前端开口部构成防咬口罩,主动防干扰模块还包括设在头盔顶部的磁场传感器和控制单元,磁场传感器与处理单元连接,头部束缚部还包括与滑槽配合的防磨垫,防磨垫上设有与气囊连接的公母卡扣;头盔壳体内侧面设有被动防干扰层,被动防干扰层包括电场屏蔽网和磁场屏蔽层,电场屏蔽网和磁场屏蔽层沿头盔壳体内侧面法向向内依次排列,电场屏蔽网和磁场屏蔽层之间设有隔离垫,电场屏蔽网与头盔壳体内侧面贴合,磁场屏蔽层上设有硬质材料制成的防护层;调节模块包括多个设在防护层上的传感器伸缩套筒,传感器伸缩套筒包括滑动配合的外套筒和内套筒,外套筒与防护层连接,内套筒一端设有球冠状固定罩,固定罩顶部设有与内套筒配合的通孔,内套筒内设有与通孔配合的脑电波传感器,调节模块还包括沿传感器伸缩套筒外侧面环绕一周的伸缩气囊,伸缩气囊呈筒状且与微型气泵连通,伸缩气囊一端与防护层连接,伸缩气囊另一端与固定罩连接;头盔壳体的颚托部内侧设有开口向上的消毒灯槽,消毒灯槽呈带状,消毒灯槽内设有紫外消毒灯。
7.优选的,约束基板还包括板状躯干基板,躯干基板的左右两侧均设有与自锁式插拔杆配合的插拔孔;躯干基板中部设有躯干限位孔,躯干限位孔内侧面设有躯干气囊,躯干气囊内侧面设有躯干束缚部,躯干限位孔的水平截面呈葫芦状,在躯干限位孔的右侧内侧面上设有伸缩挡板,伸缩挡板与躯干限位孔前后内侧面之间的区域构成副腿部限位槽,躯干基板内设有躯干微型气泵;躯干基板的前后两侧面设有上肢滑槽,上肢滑槽一端设有上肢活动杆,上肢活动杆包括铰接的上肢固定杆和转向支架,上肢固定杆包括大臂固定杆和小臂固定杆,大臂固定杆和小臂固定杆之间设有可锁定的铰接机构,大臂固定杆和小臂固定杆上设有上肢束缚带;上肢活动杆和转向支架上设有与上肢滑槽滑动配合的全向即停模块,全向即停模块包括承压滑块,承压滑块上设有与上肢滑槽固定的紧固螺栓,承压滑块上端面设有基柱,基柱上端面设有内壳体,内壳体为中空的球台,内壳体上端面设有一体化连接的摩擦曲面,摩擦曲面与内壳体的球心重合,摩擦曲面沿球心等角度分布,摩擦曲面内侧面设有施压垫片,施压垫片内侧面上沿半径向球心延伸有施压杆,施压杆顶端设有与内壳体球心重合的球头安装座,球头安装座上设有穿过基柱与承压滑块连接的施压伸缩杆,内壳体外侧面设有与摩擦曲面球心重合的外壳体,外壳体为中空的球缺,外壳体外侧面设有加强筋。
8.优选的,躯干束缚部包括带状的柔性躯干挡板,柔性躯干挡板环绕躯干限位孔内侧面一周;柔性躯干挡板外侧面设有与头部束缚部配合的伸缩脖套,柔性躯干挡板外侧面设有水箱,水箱内设有循环泵,还设有与上肢固定杆配合的上肢束缚套;上肢束缚套包括铰接的上臂套和下臂套,上臂套包括环状排列的夹板,夹板外侧面设有上臂束缚带,夹板内侧面设有血压带,下臂套上设有与柔性躯干挡板连接的魔术贴,上臂套和下臂套连接处设有关节限位垫,关节限位垫设在夹板内侧面,关节限位垫包括u型柔性保护套,保护套内填充有水凝胶,水凝胶内设有多个毛细管道,关节限位垫还包括设在保护套上与水箱连通的进
水管和出水管,进水管上设有加热器,下臂套一端设有防抓伤手套,防抓伤手套上设有手背盖和手指盖,柔性躯干挡板外侧面通过公母扣与躯干基板连接;柔性躯干挡板内侧面设有与躯干微型气泵连通的束缚气囊,束缚气囊上设有多个贯穿躯干限位孔顶部和底部的束缚袢,束缚气囊上还设有与束缚袢配合的束缚带,束缚带环绕躯干限位孔横截面一周,束缚气囊内侧面上设有与伸缩挡板配合的护垫。
9.优选的,约束基板还包括板状腿部基板,腿部基板的左侧面设有转动铰接模块,腿部基板的左侧面设有插拔孔,插拔孔内设有基板固定机构,腿部基板中部设有腿部通孔,腿部通孔内侧面设有腿部气囊,腿部气囊内侧面上设有腿部束缚部,腿部气囊环绕腿部通孔内侧面一周,腿部气囊上设有环绕贯穿腿部通孔横截面一周的束缚带,腿部基板内设有与腿部气囊连通的腿部微型气泵,腿部束缚部包括带状的柔性腿部挡板,柔性腿部挡板环绕腿部通孔内侧面一周,柔性腿部挡板外侧面通过公母扣与腿部基板连接,柔性腿部挡板外侧面还设有与躯干束缚部连接的弹性腰环,柔性腿部挡板内侧面设有束缚气囊。
10.优选的,翻转座下端面设有安装基座,安装基座底端面设有与床体配合的滑块,翻转座包括环形翻转机构和约束固定模块,翻转机构包括外套圈,外套圈内侧面设有与约束固定机构连接的滚动圈,外套圈和滚动圈包括铰接的上下两部分,外套圈左侧面中部设有铰接机构,外套圈右侧面设有翻转限位机构,翻转限位机构包括与翻转基座连接的固定杆,固定杆顶端与横板下端面齐平,固定杆顶端设有伸缩限位杆,外套圈上下两部分的连接面处设有电磁紧固模块;外套圈包括沿端面向中心线延伸的l状外挡环,外挡环之间的区域构成滚动圈卡槽,外挡环沿外套圈对称布置,外套圈内侧面上设有滚动槽;滚动圈包括与滚动圈卡槽相配合的卡块,卡块外侧面上设有与滚动槽相配合的滚动环;约束固定机构包括贯穿滚动圈的横板,横板上端面通过中心线,横板的右侧面与滚动圈的侧面齐平,滚动圈的宽度小于横板宽度 2-3cm,横板超出滚动圈部分的前后端面上设有与伸缩限位杆配合的限位孔,横板右侧面设有与基板固定机构配合的横板固定器,横板固定器包括固定母壳,固定母壳内设有与基板詹式钩配合的横板詹式钩,横板詹式钩上设有锁舌和固定销。
11.优选的,床体包括装有万向轮的底座,底座上设有支撑柱,支撑柱内设有主升降机构和副升降机构,支撑柱顶端铰接有约束床体模块,约束床体模块包括主床体,还包括与主床体左右两侧铰接的头部床体和腿部床体,主床体侧面设有护罩模块,头部床体上设有与底座配合的伸缩杆,床体呈凸台结构。
12.优选的,提升模块包括与床体连接的升降伸缩杆,升降伸缩杆设在凸台状床体的前后端面上,升降伸缩杆杆顶端设有承重架;承重架包括主承重架,还包括结构相同且主承重架铰接的头部承重架和腿部承重架;主承重架包括设在升降伸缩杆顶端的承重板,承重板两端设有相邻的辅助称重副板,辅助称重副板一端面与铅锤面的夹角为40-60度,辅助称重副板上端面设有辅助滑轨,辅助滑轨一端设有限位挡板,承重板上端面设有与床体配合的承重网。
13.优选的,头部承重架和腿部承重架包括设在升降伸缩杆顶端的承重板,承重板一端设有相邻的倾斜支座,倾斜支座上端面设有与滑块配合的导轨,导轨沿床体外侧面u型布置,承重板上端面设有与辅助滑轨铰接的滑轨,承重板上端面还设有位于滑轨之间的承重网。
14.本发明对于现有技术,具有以下有益效果:本发明通在底座上安装万向轮,方便约
束装置的移动,通过支撑柱的主升降机构和副升降机构能够有效的对约束装置的高度进行调节,同时通过副升降机构对约束装置的倾斜角度进行调整,本发明的主床体左右两侧铰接有头部床体和腿部床体,在不使用时可将头部床体和腿部床体进行折叠,减小占用空间,同时还可根据被实验动物大小调整约束床体模块的长度,本发明通过约束床体模块上的约束床体倾斜模块能够对处于约束状态的动物进行翻身动作而不需要将动物解绑然后再重新束缚,降低试验难度,同时不会引起动物情绪的剧烈波动而对观测结构造成影响,本发明的床体、提升模块和约束模块均分为三部分,且通过铰接模块连接,约束基板上的铰接模块为转动铰接模块,在约束基板翻转过程中,铰接模块的顶部始终朝上,避免约束基板在翻转后发生对折,本发明的约束模块包括约束基板和束缚模块,能够有效对动物进行双重束缚,限制动物的活动自由度,通过束缚模块上的关节限位垫对关节处进行限制,减小动物活动自由度,同时头部束缚部通过骨传导耳机对动物播放音乐稳定动物情绪,还通过紫外消毒灯对头部束缚部内部进行消毒,保护实验动物健康,头部束缚部上安装的主被动防干扰模块能够减小外界电磁波对实验结果的影响。
附图说明
15.图1是灵长类动物实验智能约束装置示意图;图2是承重架示意简图;图3是b-b示意图;图4是头部床体和腿部床体剖面示意图;图5是a-a示意图;图6是翻转机构右视图;图7是翻转机构剖面图;图8是约束基板示意图;图9是固定公壳和固定母壳示意图;图10是固定母壳示意图;图11是詹式钩示意图;图12是转动铰接模块主视图;图13是转动铰接模块示意图;图14是头部束缚部示意图;图15是调节模块示意图;图16是上肢活动杆示意图;图17是全向即停模块示意图;图18是摩擦曲面示意图;图19是上肢固定杆示意图;图20是上臂套主视图;图21是上臂套侧视图;图22是关节限位垫示意图;图23是躯干束缚部和腿部束缚部示意图;图24是防抓伤手套示意图。
16.图中:底座1、支撑柱2、主升降机构3、副升降机构4、腿部床体5、主床体6、约束模块7、约束基板701、头部束缚部702、躯干束缚部703、柔性躯干挡板704、束缚带705、上肢束缚套706、腿部束缚部707、防咬口罩708、伸缩脖套709、肩部限位套710、固定公壳711、关节限位垫712、防抓伤手套713、手背盖714、手指盖715、基板詹式钩716、头部通孔717、转动铰接模块718、躯干限位孔719、腿部通孔720、伸缩挡板721、左摆杆722、转动杆723、伺服电机724、右摆杆725、限位台726、头盔壳体727、亥姆霍兹线圈728、传感器伸缩套筒729、调节模块730、被动防干扰层731、球冠状固定罩732、伸缩气囊733、脑电波传感器734、上臂套735、下臂套736、夹板737、血压带738、上臂束缚带739、毛细管道740、进水管741、出水管742、加热器743、头部床体8、伸缩杆9、护罩模块10、翻转模块11、承重架1101、主承重架1102、头部承重架1103、腿部承重架1104、翻转座1105、承重板1106、升降伸缩杆1107、滑轨1108、倾斜连杆1109、承重网1110、安装基座1111、翻转座1112、翻转机构1113、约束固定模块1114、辅助滑轨1115、倾斜支座1116、导轨1117、滑块1118、外套圈1119、滚动圈1120、固定杆1121、伸缩限位杆1122、滚动槽1123、外挡环1124、滚动圈卡槽1125、滚动环1126、卡块1127、铰接机构1128、电磁紧固模块1129、横板詹式钩1130、锁舌1131、固定母壳1132、固定销1133、上肢活动杆12、全向即停模块1201、上肢固定杆1202、转向支架1203、承压滑块1204、基柱1205、施压伸缩杆1206、内壳体1207、摩擦曲面1208、施压垫片1209、外壳体1210、球头安装座1211、施压杆1212、大臂固定杆1213、小臂固定杆1214、铰接机构1215、上肢束缚带1216。
具体实施方式
17.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
18.实施例一如图1、图2、图5、图8、图9、图12-图15和图23所示的一种灵长类动物实验智能约束装置,包括床体,床体上设有翻转模块11,翻转模块11包括设在床体两侧的翻转座1105,还包括设在翻转座1105之间的提升模块,提升模块设在床体上并与翻转座1105滑动配合,提升模块上设有约束模块7,约束模块7包括与提升模块磁力连接的板状约束基板701,约束基板701两端设有与翻转座1105连接的基板固定机构,约束基板701上还设有束缚模块;约束基板701分为三部分并通过设置的转动铰接模块718连接,转动铰接模块718包括设在约束基板701内的动力模块,还包括与动力模块连接的铰接部,铰接部包括铰接的左摆杆722和右摆杆725,左摆杆722和右摆杆725呈凸台状。
19.约束基板701包括板状头部基板,头部基板左侧设有插拔孔,头部基板还包括设在插拔孔内的基板固定机构,基板固定机构包括设在插拔孔内的自锁式插拔杆,自锁式插拔杆一端设有固定公壳711,固定公壳711的方形凹槽内设有基板詹式钩716;头部基板中部设有与头部束缚部702配合的椭圆状头部通孔717,头部基板上、下端面设有与头部通孔717连接的滑槽,滑槽沿头部通孔717长轴延伸到头部基板右侧端,头部束缚部702沿滑槽滑动,头部通孔717内侧面设有环绕一周的气囊,气囊内侧面设有头部束缚部,头部基板内设有与气囊连通的微型气泵,头部基板内还设有与提升模块连接的磁体模块;头部基板右侧设有转动铰接模块718,转动铰接模块718包括设在头部基本内的安装槽,安装槽顶端设有伺服电
机724,还包括与伺服电机724连接的转动杆723,转动杆723上背离伺服电机724端设有方形左摆杆722,左摆杆722上端一体化设有限位台726,还包括与左摆杆722配合的右摆杆725,右摆杆725上端一体化设有限位台726,限位台726与头部基板上端面共面,右摆杆725右侧面设有自锁式插拔杆。
20.头部束缚部702包括头盔壳体727和调节模块730,头盔壳体727外侧面设有主动防干扰模块,主动防干扰模块包括多个正交连接的亥姆霍兹线圈728,亥姆霍兹线圈728设在头盔壳体727外表面上,亥姆霍兹线圈728在头盔壳体727前端开口部构成防咬口罩708,主动防干扰模块还包括设在头盔顶部的磁场传感器和控制单元,磁场传感器与处理单元连接,头部束缚部702还包括与滑槽配合的防磨垫,防磨垫上设有与气囊连接的公母卡扣;头盔壳体727内侧面设有被动防干扰层731,被动防干扰层731包括电场屏蔽网和磁场屏蔽层,电场屏蔽网和磁场屏蔽层沿头盔壳体727内侧面法向向内依次排列,电场屏蔽网和磁场屏蔽层之间设有隔离垫,电场屏蔽网与头盔壳体727内侧面贴合,磁场屏蔽层上设有硬质材料制成的防护层;调节模块730包括多个设在防护层上的传感器伸缩套筒729,传感器伸缩套筒729包括滑动配合的外套筒和内套筒,外套筒与防护层连接,内套筒一端设有球冠状固定罩732,固定罩732顶部设有与内套筒配合的通孔,内套筒内设有与通孔配合的脑电波传感器734,调节模块730还包括沿传感器伸缩套筒729外侧面环绕一周的伸缩气囊733,伸缩气囊733呈筒状且与微型气泵连通,伸缩气囊733一端与防护层连接,伸缩气囊733另一端与固定罩734连接;头盔壳体727的颚托部内侧设有开口向上的消毒灯槽,消毒灯槽呈带状,消毒灯槽内设有紫外消毒灯。
21.在一种实施方式中,通过公母卡扣将头部束缚部702与头部基板解绑并将相应的管道拔掉,然后将头盔壳体727套在动物的头部,然后将实验动物抬起放置在床体上,按住动物的四肢,将头部基本上的管道与头部束缚部702连通,通过公母扣将头部束缚部702与头部基板解绑固定,观察动物头部包裹情况,然后通过微型气泵向头盔壳体727内的伸缩气囊733进行充气或抽气,当实验动物头部活动比较自由时,微型气泵向伸缩亲囊733充气,伸缩气囊733体积增大,带动调节模块730的传感器伸缩套筒729向实验动物头部运动,使得固定罩732紧密的与头部贴合,对动物头部进行位置限制,当观察到动物头部不能活动时关闭微型气泵和阀门;在对动物进行脑部研究时,主动防干扰模的磁场传感器测量头部壳体727附近的干扰磁场,然后将数据发送到处理单元,处理单元处理后控制亥姆霍兹线圈728的电流大小和方向,形成与干扰磁场方向相反大小相等的磁场,减弱外界干扰磁场对实验数据的干扰,被动防干扰层731的电场屏蔽网和磁场屏蔽层对电场进行屏蔽和部分恒定磁场进行屏蔽,进一步减小外界电场和磁场对实验数据的影响,然后通过脑电波传感器734将数据进行收集并发送到计算机,在实验结束后可通过紫外消毒灯对头部束缚部702内部进行消毒,防止交叉感染,保护实验动物健康。
22.如图1、图8-9和图16-24所示,约束基板701还包括板状躯干基板,躯干基板的左右两侧均设有与自锁式插拔杆配合的插拔孔;躯干基板中部设有躯干限位孔719,躯干限位孔719内侧面设有躯干气囊,躯干气囊内侧面设有躯干束缚部703,躯干限位孔719的水平截面呈葫芦状,在躯干限位孔719的右侧内侧面上设有伸缩挡板721,伸缩挡板721与躯干限位孔719前后内侧面之间的区域构成副腿部限位槽,躯干基板内设有与躯干气囊连通的躯干微
型气泵;躯干基板的前后两侧面设有上肢滑槽,上肢滑槽一端设有上肢活动杆12,上肢活动杆12包括铰接的上肢固定杆1202和转向支架1203,上肢活动杆12和转向支架1203上设有与上肢滑槽滑动配合的全向即停模块1201,全向即停模块1201包括承压滑块1204,承压滑块1204上设有与上肢滑槽固定的紧固螺栓,承压滑块1204上端面设有基柱1205,基柱1205上端面设有内壳体1207,内壳体1207为中空的球台,内壳体1207上端面设有一体化连接的摩擦曲面1208,摩擦曲面1208与内壳体1207的球心重合,摩擦曲面1208沿球心等角度分布,摩擦曲面1208内侧面设有施压垫片1209,施压垫片1209内侧面上沿半径向球心延伸有施压杆1212,施压杆1212顶端设有与内壳体1207球心重合的球头安装座1211,球头安装座1211上设有穿过基柱1205与承压滑块1204连接的施压伸缩杆1206,内壳体1207外侧面设有与摩擦曲面1208球心重合的外壳体1210,外壳体1210为中空的球缺,外壳体1210外侧面设有加强筋;上肢固定杆1202包括大臂固定杆1213和小臂固定杆1214,大臂固定杆1213和小臂固定杆1214之间设有可锁定的铰接机构1215,大臂固定杆1213和小臂固定杆1214上设有上肢束缚带1216;躯干限位孔719内侧面设有躯干气囊。
23.躯干束缚部703包括带状的柔性躯干挡板704,柔性躯干挡板704环绕躯干限位孔719内侧面一周;柔性躯干挡板704外侧面设有与头部束缚部702配合的伸缩脖套709和肩部限位套710,柔性躯干挡板704外侧面设有水箱,水箱内设有循环泵,还设有与上肢固定杆1202配合的上肢束缚套706;上肢束缚套706包括铰接的上臂套735和下臂套736,上臂套735包括环状排列的夹板737,夹板737外侧面设有上臂束缚带739,夹板737内侧面设有血压带738,下臂套735上设有与柔性躯干挡板704连接的魔术贴,上臂套735和下臂套736连接处设有关节限位垫712,关节限位垫712设在夹板737内侧面,关节限位垫712包括u型柔性保护套,保护套内填充有水凝胶,水凝胶内设有多个毛细管道740,关节限位垫712还包括设在保护套上与水箱连通的进水管741和出水管742,进水管741上设有加热器743,下臂套735一端设有防抓伤手套713,防抓伤手套713上设有手背盖714和手指盖715,柔性躯干挡板704外侧面通过公母扣与躯干基板连接;柔性躯干挡板704内侧面设有与躯干微型气泵连通的束缚气囊,束缚气囊上设有多个贯穿躯干限位孔719顶部和底部的束缚袢,束缚气囊上还设有与束缚袢配合的束缚带705,束缚带705环绕躯干限位孔719横截面一周,束缚气囊内侧面上设有与伸缩挡板721配合的护垫。
24.约束基板701还包括板状腿部基板,腿部基板的左侧面设有转动铰接模块718,腿部基板的左侧面设有插拔孔,插拔孔内设有基板固定机构,腿部基板中部设有腿部通孔720,腿部通孔720内侧面设有腿部气囊,腿部气囊环绕腿部通孔720内侧面一周,腿部气囊内侧面上设有腿部束缚部707,腿部气囊上设有环绕贯穿腿部通孔720横截面一周的束缚带705,腿部基板内设有与腿部气囊连通的腿部微型气泵,腿部束缚部707包括带状的柔性腿部挡板,柔性腿部挡板环绕腿部通孔720内侧面一周,柔性腿部挡板外侧面通过公母扣与腿部基板连接,柔性腿部挡板内侧面设有束缚气囊。
25.在一种实施方式中,通过公母卡扣将躯干束缚部703和腿部束缚部707与躯干基板和腿部基板解绑,然后将躯干束缚部703的柔性躯干挡板704将动物躯干包裹,将腿部束缚部707的柔性腿部挡板将动物腿部包裹,然后通过束缚带705将动物的躯干和腿部与柔性躯干挡板704和柔性腿部挡板紧密束缚,然后将动物的上肢放置到上肢束缚套706的上臂套735和下臂套736中,通过上臂束缚带739和下臂束缚带将上肢的上臂和下臂进行束缚,并使
得关节限位垫712位于上肢的关节处,然后将动物抬到主床体5上的躯干基板上,通过公母扣进行限位;将相关管道和电源线插接连接,然后通过躯干微型气泵向柔性躯干挡板704内侧的束缚气囊充气,使得柔性躯干挡板704将动物躯干包裹,通过腿部微型气泵向束缚气囊充气,使得柔性腿部挡板将动物下肢包裹,然后通过躯干微型气泵和腿部微型气泵向躯干限位孔719和腿部通孔720内侧面的躯干气囊和腿部气囊进行充气,同时结合束缚带705使得躯干限位孔719和腿部通孔720与柔性躯干挡板704和柔性腿部挡板紧密连接,然后将动物手臂伸直,通过循环泵将水箱中的水向送入关节限位垫712的毛细管道740中,毛细管道740由弹性材料制成,通水加压后体积膨胀,对保护套内的水凝胶进行挤压,水凝胶与肌肉的特性相似,使得关节限位垫712的硬度增加,同时关节限位垫712呈环状将关节包裹,使得关节的运动自由度收到较大的限制;将束缚好动物上肢的上肢束缚套706置入上肢固定杆1202上,通过上肢束缚带1216将上肢束缚套706与上肢固定杆1202固定,当需要将动物上肢抬起一定高度时通过摆动上肢活动杆12,将上肢活动杆12调节到需要的位置,然后通过控制按键将全向即停模块1201的施压伸缩杆1206向上提升,施压伸缩杆1206向上运动时推动球头安装座1211向上运动,继而带动施压杆1212向上运动,由于摩擦曲面1208对施压垫片1209的阻碍,摩擦曲面1208收到较大的向外推力,摩擦曲面1208受到外壳体1210的限位,摩擦曲面1208与外壳体1210之间的正压力增加,摩擦曲面1208与外壳体1210之间的摩擦力增加,限制上肢活动杆12的上肢固定杆1202和转向支架1203的运动,方便对动物进行实验操作。
26.实施例2如图1-7和图9-11所示的一种灵长类动物实验智能约束装置,与实施例1相比,翻转座1112下端面设有安装基座1111,安装基座1111底端面设有与床体配合的滑块1118,翻转座1112包括环形翻转机构1113和约束固定模块1114,翻转机构1113包括外套圈1119,外套圈1119内侧面设有与约束固定机构1114连接的滚动圈1120,外套圈1119和滚动圈1120包括铰接的上下两部分,外套圈1119左侧面中部设有铰接机构1128,外套圈1119右侧面设有翻转限位机构,翻转限位机构包括与翻转基座1111连接的固定杆1121,固定杆1121顶端与横板下端面齐平,固定杆1121顶端设有伸缩限位杆1122,外套圈1119上下两部分的连接面处设有电磁紧固模块1129;外套圈1119包括沿端面向中心线延伸的l状外挡环1124,外挡环1124之间的区域构成滚动圈卡槽1125,外挡环1124沿外套圈1119对称布置,外套圈1119内侧面上设有滚动槽1123;滚动圈1120包括与滚动圈卡槽1125相配合的卡块1127,卡块1127外侧面上设有与滚动槽1123相配合的滚动环1126;约束固定机构1114包括与滚动圈连接的横板,横板的右侧面与滚动圈的侧面齐平,滚动圈的宽度小于横板宽度 2-3cm,横板超出滚动圈部分的前后端面上设有与伸缩限位杆1122配合的限位孔,横板右侧面设有与基板固定机构配合的横板固定器,横板固定器包括固定母壳1132,固定母壳1132内设有与基板詹式钩716配合的横板詹式钩1130,横板詹式钩1130上设有锁舌1131和固定销1133。
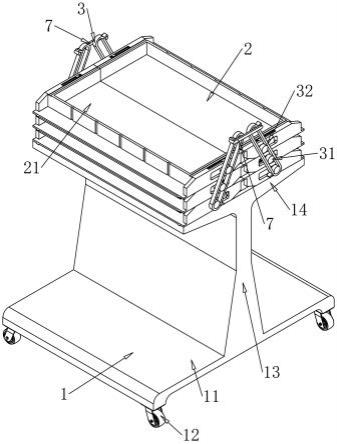
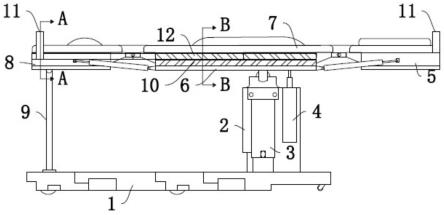
27.床体包括装有万向轮的底座1,底座1上设有支撑柱2,支撑柱2内设有主升降机构3和副升降机构4,支撑柱2顶端铰接有约束床体模块,约束床体模块包括主床体6,主床体6侧面设有护罩模块10,还包括与主床体6左右两侧铰接的头部床体8和腿部床体5,头部床体8上设有与底座1配合的伸缩杆9,床体呈凸台结构。
28.提升模块包括与床体连接的升降伸缩杆1107,升降伸缩杆1107设在凸台状床体的前后端面上,升降伸缩杆杆1107顶端设有承重架1101;承重架1101包括主承重架1102,还包括结构相同且主承重架1102铰接的头部承重架1103和腿部承重架1104;主承重架1102包括设在升降伸缩杆1107顶端的承重板1106,承重板1106两端设有相邻的辅助称重副板,辅助称重副板一端面与铅锤面的夹角为40-60度,辅助称重副板上端面设有辅助滑轨1115,辅助滑轨1115一端设有限位挡板,承重板1106上端面设有与床体配合的承重网1110。
29.头部承重架1103和腿部承重架1104包括设在升降伸缩杆1107顶端的承重板1106,承重板1106一端设有相邻的倾斜支座1116,倾斜支座1116上设有与头部床体8连接倾斜连杆1109,倾斜支座1116上端面设有与滑块1118配合的导轨1117,导轨1117沿床体外侧面u型布置,承重板1106上端面设有与辅助滑轨1115铰接的滑轨1108,承重板1106上端面还设有位于滑轨1108之间的承重网1110。
30.在一种实施方式中,通过约束模块7将动物进行固定,腿部床体5和头部床体8与主床体6的铰接,当动物体型较大时,将腿部床体5和头部床体8展开,然后在液压杆的作用下保持位置不变,同时将头部床体8下方的伸缩杆9展开,对头部床体8进行支撑;翻转机构1113位于头部床体8和腿部床体5的倾斜支座1116上,将翻转机构1113的外圈1119和滚动圈1120从折叠状态展开为环状并通过电磁紧固模块1129进行固定,然后通过电动伸缩杆1107将床体上的承重网1110抬升,继而将约束模块7的高度提升,直至将约束模块7提升到与约束固定机构1114齐平处,然后推动翻转座1105使得约束固定机构1114的固定母壳1132与约束模块7上的固定公壳711进行固定,然后电动伸缩杆1107带动承重网1110下降到最低处,通过转动约束模块7对动物体位进行调整,当将动物翻转180后通过伸缩限位杆1122将约束固定机构1114进行固定,在转动过程中为防止约束模块7的约束基板701在转动时对折,伺服电机724带动铰接部逆方向转动,使得左摆杆722和右摆杆725的限位台726始终朝上,然后电动伸缩杆1107将承重网1110抬升,直至将约束模块7提升到与约束固定机构1114齐平处,然后将约束固定机构1114与约束模块7解除固定,电动伸缩杆1107下降到最低处,带动约束模块7下落到承重网1110上;护罩模块10包括两个抽拉杆,抽拉杆包括铰接的外杆和内杆,内杆与外杆连接处设有卡板,内杆顶端设有弹性模块,还包括设在主床体6内且与卡板配合的棘轮,外杆顶端设有沿主床体6侧面的护罩辊,护罩辊上设有电致可变色柔性薄膜,外杆上还设有与护罩辊配合的紫外消毒灯条,紫外消毒灯条上设有圆弧状遮挡板;当需要将动物进行翻身动作且动物体型较小时,将腿部床体5和头部床体8展开,然后推动翻转机构1113沿头部床体8和腿部床体5上的滑轨1108运动到主床体6的辅助滑轨1115上,然后将腿部床体5和头部床体8折叠,当需要对动物体位进行调整时重复上述体位调整过程,其余设置与操作与实施例1相同。
31.以上仅为本发明的优选实施例而已,只为说明本发明的方案及效果,不能被认为用于限定本发明的实施范围,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化与改进,均应仍归属于本发明的专利涵盖范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。