1.本实用新型属于电池包搬运设备技术领域,特别是涉及一种电池包堆垛机。
背景技术:
2.目前,电动汽车的能量供应分为插充和换电两种模式,其中换电模式采用更换电池的方式为电动汽车提供能源,与插充模式相比,具有提高用户便捷,减少电动车充电时间,充电效率高,延长电池使用寿命,方便电池更新迭代,降低用电成本等优点。
3.然而,换电站的电池仓内存放有大量的电池,由于不同电动汽车的电池不同,更换电池时查找难度大,导致在电池仓存取电池时定位精度低。
技术实现要素:
4.本实用新型提供了一种电池包堆垛机,实现了精准存取电池包。
5.为解决上述技术问题,本实用新型实施例提供一种电池包堆垛机,包括支撑架、驱动装置和移动装置;所述移动装置装配在所述支撑架上;所述驱动装置与所述移动装置相连,用于驱动所述移动装置移动;
6.所述电池包堆垛机还包括用于支撑电池包的托盘,所述托盘上设置有第一限位结构,所述电池包上设置有第二限位结构,所述第一限位结构与所述第二限位结构相匹配,固定所述托盘和所述电池包;
7.所述托盘装配在所述移动装置上,用于在所述移动装置的作用下,使所述托盘和所述电池包移动到电池仓对应的位置。
8.可选地,所述第一限位结构与所述第二限位结构中的一个为限位凹槽,另一个为第一限位凸起,所述限位凹槽和所述第一限位凸起相匹配。
9.可选地,所述移动装置包括安装架和货叉组件;所述安装架装配在所述支撑架上;所述货叉组件装配在所述安装架上;所述货叉组件上设有第三限位结构,所述托盘上设有第四限位结构;所述第三限位结构和所述第四限位结构可拆卸连接,固定所述货叉组件和所述托盘;
10.所述驱动装置包括第一驱动机构,所述第一驱动机构与所述货叉组件相连,用于驱动所述货叉组件相对于所述安装架沿第一水平方向往复移动,以使所述货叉组件伸入或伸出所述电池仓。
11.可选地,所述第三限位结构和所述第四限位结构中,一者为第二限位凸起,另一者为限位孔;
12.所述货叉组件与所述托盘抵接时,所述第二限位凸起卡合在所述限位孔内。
13.可选地,所述货叉组件包括货叉和导轨;
14.所述导轨沿所述第一水平方向装配在所述安装架上;
15.所述货叉装配在所述导轨上,所述货叉上设有所述第三限位结构;
16.所述第一驱动机构与所述货叉相连,用于驱动所述货叉相对于所述导轨沿所述第
一水平方向往复移动。
17.可选地,所述电池包堆垛机设置在沿所述第一水平方向分布的两个电池仓之间;
18.所述货叉组件设有两个,两个所述货叉组件沿所述第一水平方向分布,每一所述货叉组件与一所述电池仓相对设置。
19.可选地,所述移动装置还包括连接架,所述连接架装配在所述安装架上;
20.所述第一驱动机构和所述货叉组件装配在所述连接架上,所述第一驱动机构用于驱动所述货叉组件相对于所述连接架沿所述第一水平方向往复移动;
21.所述驱动装置还包括第二驱动机构,所述第二驱动机构与所述连接架相连,用于驱动所述连接架相对于所述安装架沿竖直方向移动。
22.可选地,所述第二驱动机构包括驱动结构和防坠结构;
23.所述驱动结构与所述连接架相连,用于驱动所述连接架相对于所述安装架沿竖直方向移动;
24.所述防坠结构装配在所述驱动结构上,用于在所述驱动结构停止工作后限制所述连接架相对于所述安装架沿竖直方向移动。
25.可选地,所述驱动装置还包括第三驱动机构,所述第三驱动机构与所述安装架相连,用于驱动所述安装架相对于所述支撑架沿第二水平方向移动;所述第二水平方向与所述第一水平方向垂直。
26.可选地,所述电池包堆垛机还包括控制装置与传感器;所述控制装置分别与所述传感器和所述驱动装置连接;所述传感器用于检测电池包的位置信息并将该位置信息反馈至所述控制装置;所述控制装置用于根据所述位置信息控制所述驱动装置工作。
27.本实用新型实施例提供的电池包堆垛机,与现有技术相比,设有用于支撑电池包的托盘,并且托盘上设有与电池包上第二限位机构相匹配的第一限位结构,第一限位结构与第二限位结构配合将电池包固定在托盘上,使得托盘和电池包作为一个整体在移动装置的带动下移动,提高了存取电池包的定位精度,有利于移动装置精准且快速地在电池仓中存放或取出电池包。
附图说明
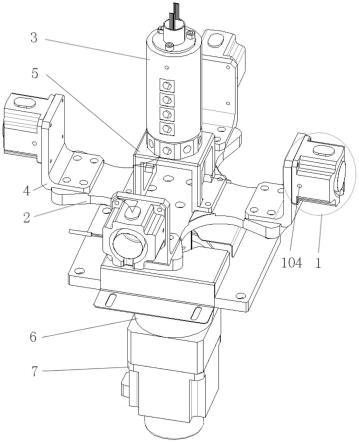
28.图1是本实用新型一实施例提供的电池包堆垛机的结构示意图;
29.图2是本实用新型一实施例提供的电池包堆垛机的部分结构示意图;
30.图3是本实用新型一实施例提供的电池包堆垛机的部分结构示意图;
31.图4是本实用新型一实施例提供的移动装置和托盘的结构示意图;
32.图5是本实用新型一实施例提供的货叉组件的结构示意图;
33.图6是本实用新型一实施例提供的托盘与电池包的结构示意图;
34.图7是本实用新型一实施例提供的托盘的结构示意图。
35.1、支撑架;2、驱动装置;21、第一驱动机构;22、第二驱动机构;221、驱动结构;222、防坠结构;23、第三驱动机构;231、驱动电机;232、齿轮;233、齿条;3、移动装置;31、安装架;32、货叉组件;321、第二限位凸起;322、货叉;323、导轨;33、连接架;4、托盘;41、托盘本体;42、限位件;43、限位凹槽;44、限位孔;5、电池包;51、第一限位凸起。
具体实施方式
36.为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
37.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
38.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
39.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
40.如图1、图6和图7所示,本实用新型实施例提供的电池包堆垛机,包括支撑架1、驱动装置2和移动装置3;移动装置3装配在支撑架1上;驱动装置2与移动装置3相连,用于驱动移动装置3移动;电池包堆垛机还包括用于支撑电池包5的托盘4,托盘4上设置有第一限位结构,电池包5上设置有第二限位结构,第一限位结构与第二限位结构相匹配,固定托盘4和电池包5;托盘4装配在移动装置3上,用于在移动装置3的作用下,使托盘4和电池包5移动到电池仓对应的位置。
41.与现有技术相比,本实用新型实施例提供的电池包堆垛机,设有用于支撑电池包5的托盘4,并且托盘4上设有与电池包5上第二限位机构相匹配的第一限位结构,第一限位结构与第二限位结构配合将电池包5固定在托盘4上,使得托盘4和电池包5作为一个整体在移动装置3的带动下移动,提高了存取电池包5的定位精度,有利于移动装置3精准且快速地在电池仓中存放或取出电池包5。
42.在一实施例中,第一限位结构与第二限位结构中的一个为限位凹槽,另一个为第一限位凸起,限位凹槽和第一限位凸起相匹配。限位凹槽和第一限位凸起凹凸配合,以固定电池包5和托盘4,定位精准稳定,结构简单,便于自动化操作。
43.在本实施例中,如图6和图7所示,第一限位结构为限位凹槽43,第二限位结构为第一限位凸起51,即在托盘4上加工形成限位凹槽43,在电池包5上加工形成第一限位凸起51,加工更加简单方便。
44.在本实施例中,如图7所示,托盘4包括托盘本体41和固定在托盘本体41上的限位件42,限位件42上设有限位凹槽43。将设有限位凹槽43的限位件42集成在托盘本体41上,解决了由于托盘本体41太薄无法加工出足够深度的限位凹槽43的问题,保证了限位凹槽43与第一限位凸起51卡合的稳定性,提高电池包5的定位精度。
45.在本实施例中,限位件42设有多个,多个限位件42分别设置在托盘本体41的相对的两侧边缘,每一限位件42对应电池包5上的一第一限位凸起51,增加托盘4与电池包5之间的凹凸卡合位,提高电池包5的定位精度,有利于精准地在电池仓中存取电池包5。
46.在本实施例中,如图7所示,托盘本体41为矩形托盘本体41,矩形托盘本体41的四角分别设有一限位件42。现有的电池包5基本为矩形电池包5,采用矩形托盘本体41来支撑矩形电池包5,匹配度高,便于操作。
47.在一实施例中,如图4、图5和图7所示,移动装置3包括安装架31和货叉组件32;安装架31装配在支撑架1上;货叉组件32装配在安装架31上;货叉组件32上设有第三限位结构,托盘4上设有第四限位结构;第三限位结构和第四限位结构可拆卸连接,固定货叉组件32和托盘4;驱动装置2包括第一驱动机构21,第一驱动机构21与货叉组件32相连,用于驱动货叉组件32相对于安装架31沿第一水平方向往复移动,以使货叉组件32伸入或伸出电池仓。
48.在本实施例中,货叉组件32和托盘4通过第三限位结构和第四限位结构固定,保证了在移动过程中托盘4与货叉组件32之间不会产生相对移动,使得托盘4和电池包5稳定地放置在货叉组件32上,能够通过第一驱动机构21控制货叉组件32的移动,来控制托盘4和电池包5这一整体的移动精度,实现电池包5在运输和存取时的高精度定位;并且第三限位结构和第四限位结构可拆卸连接,使得在存取电池包5时,货叉组件32便于与托盘4分离或连接。
49.在一实施例中,第三限位结构和第四限位结构中,一者为第二限位凸起,另一者为限位孔;货叉组件32与托盘4抵接时,第二限位凸起卡合在限位孔内。第二限位凸起和限位孔卡接,实现货叉组件32与托盘4的可拆卸连接,连接稳定,操作简单,便于组装与拆卸,有利于实现自动化存取电池包5。
50.在本实施例中,如图5和图7所示,第三限位结构为第二限位凸起321,第四限位结构为限位孔44,即在货叉组件32上加工形成第二限位凸起321,在托盘4上加工形成限位孔44,与将第二限位凸起321设置在托盘4上相比,托盘4与货叉组件32相对的表面为平面,托盘4能够平稳地放置在电池仓内,无需在电池仓上另设结构与托盘4匹配。
51.在本实施例中,第二限位凸起321为锥销,锥销更易于插入限位孔44,以及移出限位孔44,便于操作。
52.在一实施例中,如图5所示,货叉组件32包括货叉322和导轨323;导轨323沿第一水平方向装配在安装架31上;货叉322装配在导轨323上,货叉322上设有第三限位结构;第一驱动机构21与货叉322相连,用于驱动货叉322相对于导轨323沿第一水平方向往复移动。货叉322在第一驱动机构21的带动下,相对于导轨323沿第一水平方向往复移动,导轨323对货叉322在第一水平方向上的移动起到导向作用,避免货叉322移动时产生偏差,使得货叉322移动更加顺畅,保证了货叉322的移动精度,有利于自动化存取电池包5,提高电池包5存取的定位精度和效率。
53.在本实施例中,如图5所示,每一货叉组件32包括多个货叉322,多个货叉322沿第二水平方向间隔分布。设置多个货叉322来支撑托盘4,保证对托盘4的支撑效果,避免单个货叉322支撑托盘4和电池包5时产生弯曲。
54.在本实施例中,每一货叉322设置在一导轨323上。每一个导轨323对应支撑一个货叉322,保证对货叉322的导向作用,有利于精准控制货叉322的移动。
55.在本实施例中,每一货叉322上设有多个第二限位凸起321,每一第二限位凸起321卡合在一限位孔44内,增加了货叉322与托盘4卡接的连接处,使得货叉322与托盘4的连接
更加稳定,保证电池包5的定位精度。
56.在一实施例中,如图3所示,电池包堆垛机设置在沿第一水平方向分布的两个电池仓之间;货叉组件32设有两个,两个货叉组件32沿第一水平方向分布,每一货叉组件32与一电池仓相对设置。在电池包堆垛机上设有两个货叉组件32,使得一个电池包堆垛机能够对两侧的电池仓进行电池包5的存取,精简了结构,提高了电池包5的存取效率。
57.在一实施例中,两个货叉组件32的导轨323为一体成型。
58.在一实施例中,如图3和图4所示,移动装置3还包括连接架33,连接架33装配在安装架31上;第一驱动机构21和货叉组件32装配在连接架33上,第一驱动机构21用于驱动货叉组件32相对于连接架33沿第一水平方向往复移动;驱动装置2还包括第二驱动机构22,第二驱动机构22与连接架33相连,用于驱动连接架33相对于安装架31沿竖直方向移动。第二驱动机构22驱动连接架33沿竖直方向移动,使得货叉组件32随连接架33一起沿竖直方向移动,实现了货叉组件32在竖直方向上的自动化移动,使得货叉组件32能够存取位于不同高度的电池包5,提高了电池包5存取的自动化程度。
59.在一实施例中,如图1和图2所示,第二驱动机构22包括驱动结构221和防坠结构222;驱动结构221与连接架33相连,用于驱动连接架33相对于安装架31沿竖直方向移动;防坠结构222装配在驱动结构221上,用于在驱动结构221停止工作后限制连接架33相对于安装架31沿竖直方向移动。防坠结构222能够在驱动结构221停止工作后,限制连接架33相对于安装架31沿竖直方向移动,从而防止在电池包堆垛机断电时连接架33下坠,以起到安全防护作用,保障电池包堆垛机的安全运行。
60.在本实施例中,驱动结构221为链条传动机构。
61.在本实施例中,防坠结构222为带刹车功能的导轨滑块结构。
62.在一实施例中,如图2所示,驱动装置2还包括第三驱动机构23,第三驱动机构23与安装架31相连,用于驱动安装架31相对于支撑架1沿第二水平方向移动;第二水平方向与第一水平方向垂直。第三驱动机构23驱动安装架31沿第二水平方向移动,使得货叉组件32随安装架31一起沿第二水平方向移动,实现了货叉组件32在第二水平方向上的自动化移动,使得货叉组件32能够存取位于第二水平方向上不同位置的电池包5,提高了电池包5存取的自动化程度。
63.在本实施例中,如图2所示,第三驱动机构23包括驱动电机231、齿轮232和齿条233;驱动电机231装配在安装架31上;齿轮232与驱动电机231的输出轴相连;齿条233沿第二水平方向装配在支撑架1上,齿条233与齿轮232啮合;驱动电机231用于驱动齿轮232旋转,以使齿轮232相对于齿条233沿第二水平方向移动。驱动电机231驱动齿轮232旋转,使得齿轮232相对于齿条233沿第二水平方向移动,从而带动安装架31相对于支撑架1沿第二水平方向移动;通过齿轮232和齿条233的啮合传动,能够精准控制安装架31的移动位置,提高电池包5存取的定位精度。
64.在一实施例中,电池包堆垛机还包括控制装置与传感器;控制装置分别与传感器和驱动装置2连接;传感器用于检测电池包5的位置信息并将该位置信息反馈至控制装置;控制装置用于根据位置信息控制驱动装置2工作。存放电池包5时,传感器感应到电池包5以及电池仓对应位置的位置信息,并将该位置信息传送至控制装置,控制装置根据该位置信息控制驱动装置2工作,使得驱动装置2驱动移动装置3托盘4和电池包5移动到电池仓的对
应位置,从而将托盘4和电池包5放入电池仓内;拿取电池包5时,传感器感应到电池包5在电池仓的位置信息,并将该位置信息传送至控制装置,控制装置根据该位置信息控制驱动装置2工作,使得驱动装置2驱动移动装置3移动至电池仓的对应位置,从而将托盘4和电池包5从电池仓中取出。
65.在本实施例中,通过传感器、控制装置和驱动装置2配合,实现了自动化存取电池包5,提高了电池包5存取的定位精度,提高了工作效率。
66.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。