技术特征:
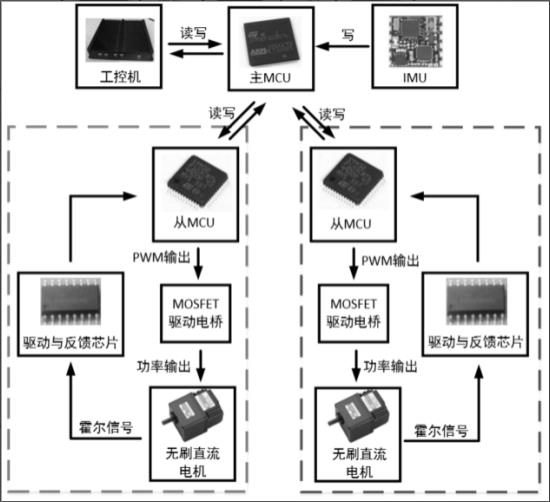
1.一种高性能移动机器人系统,其特征在于,包括工控机、主mcu、从mcu、imu、驱动电路、无刷直流电机、霍尔传感器和隔离光耦;所述主mcu用于数据传递,将imu采集到的信息以一定频率反馈给工控机;所述工控机用于向机器人发布速度控制指令,并转化为从mcu能够接收的形式向其发布指令;所述从mcu用于驱动无刷直流电机,同时还将无刷直流电机的角位移回传给主mcu,使其能够转化成工控机能够接受的信息。2.根据权利要求1所述的一种高性能移动机器人系统,其特征在于,所述驱动电路选择具有专用电机驱动芯片来控制无刷直流电机的三相桥电路,专用电机驱动芯片上配置欠压和过流保护模块,且专用电机驱动芯片内部还集成有电子刹车模块和电子转向模块。3.根据权利要求1或2所述的一种高性能移动机器人系统,其特征在于,所述驱动电路选择具有专用电机驱动芯片来控制无刷直流电机的三相桥电路,具体过程包括:通过无刷直流电机采用的霍尔传感器进行测速;专用电机驱动芯片将同时接受来自与无刷直流电机同轴连接的霍尔传感器发出的脉冲信号,并将其传递给从mcu;从mcu将利用此脉冲信号计算无刷直流电机的实时转速,通过与给定的速度进行比例-积分计算,以达到实时控制;从mcu把无刷直流电机转速反馈给主mcu,主mcu接受imu信息并与从mcu反馈信息一起处理,将移动机器人的里程信息和角度信息反馈至工控机。4.根据权利要求1所述的一种高性能移动机器人系统,其特征在于,所述从mcu与驱动电路之间通过隔离光耦相连接。5.根据权利要求3所述的一种高性能移动机器人系统,其特征在于,具体过程还包括:通过霍尔传感器发出的霍尔脉冲可以计算得到无刷直流电机的反馈的角速度其中:w
mf
为单侧无刷直流电机反馈的角速度;δt为接收霍尔脉冲的时间间隔;n为接受到霍尔脉冲的个数;p为无刷直流电机极对数;单侧车轮的线速度v
1t
与线位移d
1t
为:其中为无刷直流电机减速比,d为机器人车轮直径;主mcu计算得到的机器人在时间内的线速度v
r
,以及线位移d
r
为:主mcu已经接收完毕基于霍尔传感器信息的机器人线速度v
r
,以及线位移d
r
;主mcu将把机器人的线位移,线速度与从imu获得的角速度一起向工控机进行传输;工控机中的导航节点通常会给出期望的线速度,角速度对来实现对机器人的控制,
通过线速度与角速度可以计算得到机器人所期望的左右车轮的转速:其中v
1c
,v
2c
分别为左右车轮预期的转速,d
w
为机器人的轮距;工控机通过串口写节点,将v
1c
,v
2c
的数值以及转向写入主控mcu中。6.根据权利要求1所述的一种高性能移动机器人系统,其特征在于,所述主mcu型号为stm32zet6。7.根据权利要求1所述的一种高性能移动机器人系统,其特征在于,所述从mcu型号为stm32c8t6。8.根据权利要求1所述的一种高性能移动机器人系统,其特征在于,所述无刷直流电机型号为jy01。
技术总结
本发明属于机器人系统领域,尤其是一种高性能移动机器人系统,其包括工控机、主MCU、从MCU、IMU、驱动电路、无刷直流电机、霍尔传感器和隔离光耦;所述主MCU用于数据传递,将IMU采集到的信息以一定频率反馈给工控机;所述工控机用于向机器人发布速度控制指令,并转化为从MCU能够接收的形式向其发布指令;所述从MCU用于驱动无刷直流电机,同时还将无刷直流电机的角位移回传给主MCU,使其能够转化成工控机能够接受的信息,所述驱动电路选择具有专用电机驱动芯片来控制无刷直流电机的三相桥电路,专用电机驱动芯片上配置欠压和过流保护模块。本发明能够自动对机器人进行控制,完成整体数据的采集。的采集。的采集。
技术研发人员:袁儒鹏 袁亮 王辽建
受保护的技术使用者:苏州航准智能科技有限公司
技术研发日:2022.09.15
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。