1.本发明涉及一种超声理疗仪,具体涉及一种用于发生于手臂特别是小臂、手腕上的适应症的体外物理治疗的超声理疗仪。
背景技术:
2.超声波作用于人体组织会产生一定的生物效应,如机械效应、温热效应、空化效应等,利用低超声剂量条件下的这些效应可以达到某种的治疗目的,也就是所谓的超声理疗。
3.目前市场上较为流行的超声治疗仪大多数比较相似,通常由一个主机和一个或多个超声治疗头组成。其中超声治疗头主要由医生手持使用,该方式的整个治疗过程都需要医生参与,而一次超声理疗的时间通常在几十分钟到几小时不等,因此该方式治疗效率极低,治疗费用中的医生成本高。另外也有部分超声治疗头可以通过松紧绷带或耦合胶贴固定到患者身上使用,虽然这些方式避免了医生全程参与治疗的问题,但却依然不满足下述适应证的特殊需求。
4.如手臂或者手腕上的血管造瘘伤口的超声理疗,由于血管造瘘伤口的敏感性和伤口内部结构的差异化,需要准确的超声波入射角度控制和耦合压力控制。而市面上的设备,都需要医生通过观察进行治疗头和治疗靶区的对准,无法准确控制理疗超声的入射角度,容易出现治疗靶区超声覆盖不足,非治疗区域受到过多超声辐射的问题,导致治疗效果无法达到预期,更有甚者导致非治疗区域出现不良症状。同时,在实施治疗过程中,既要保证治疗头和皮肤的良好耦合,又要避免伤口受到过大压力(患者可能无法准确感知过大压力)的压迫,以免破坏造瘘,因此需要准确检测治疗头与皮肤之间的压力。
5.另外,在实施治疗的过程中,患者需长时间控制手臂或手腕保持一定的姿势,而患者常常因为没有很好的手臂支撑而导致后半程难以保持姿势,以致治疗无法很好的完成。
技术实现要素:
6.本发明的目的在于提供一种可以解决上述问题的超声理疗仪,为满足血管造瘘伤口的超声理疗提供具有超声入射角度检测控制和耦合压力检测控制的设备,同时还能为患者手臂提供良好的支撑,使患者能够完成长时间的超声理疗。
7.为实现上述目的,本发明采取的技术方案是:一种带手臂支撑装置的超声理疗仪,包括主控系统模块、人机交互模块、治疗超声模块、治疗超声探头、成像超声模块、成像超声探头,同时括手臂支撑装置,所述手臂支撑装置包括支撑装置驱动模块、支撑升降电机、c型臂移动电机、探头升降电机、压力检测模块和手臂支撑气囊;
8.所述支撑装置驱动模块,接收所述主控系统模块传输的控制指令,并根据控制指令分别对所述支撑升降电机、c型臂移动电机、探头升降电机、手臂支撑气囊进行控制;
9.所述支撑升降电机位于底部,其用于控制整个手臂支撑装置的高度以适应不同的手臂摆放高度,以使手臂处于自然伸展状态;这样可以使患者坚持更长的治疗时间,减轻因为手臂姿态未自然舒展而造成的手臂压迫,减轻由此导致的血流不畅、组织肿胀造成的问
题;
10.所述c型臂移动电机与探头升降电机连接,探头升降电机前端连接治疗超声探头,其中,c型臂移动电机用于控制治疗超声探头的对准角度,通过调整治疗超声探头的对准角度,使超声波的辐照角度符合设定超声入射角度,从而保证超声波可以最大限度的辐照靶区,减少对非靶区的声场辐射,从而保证治疗效果和治疗安全;探头升降电机用于控制治疗超声探头的高度,通过调整治疗超声探头的高度,控制治疗超声探头和手臂皮肤之间的贴合程度,从而保证超声波的皮肤有效透过效率;
11.所述压力检测模块,用于检测治疗超声探头与手臂皮肤之间的压力值;用户可根据检测到的压力值来进一步调整治疗超声探头的高度;用户可以根据检测到的压力值来进一步调整治疗超声探头的高度,从而使压力值处于手臂皮肤可耐受的适宜范围内;当压力值处于适宜范围内时,可以防止治疗超声探头和手臂皮肤贴合过紧,避免组织受到挤压变形影响超声波的辐射精准度和效果;也可以防止贴合过松,从而避免治疗超声探头与手臂皮肤耦合不佳的问题,避免由此引起的皮肤表面发热烫伤皮肤和超声波辐射效果差的问题;
12.所述手臂支撑气囊包括一个或多个可以控制充气量的充气气囊,通过调整不同气囊的充气量实现对手臂横向倾斜角度的调整,同时支撑和约束手臂的位置,防止治疗过程中出现因为手臂移动导致对准偏移的问题;当治疗超声探头的对准角度超出c型臂移动电机的最大限度,可以进一步的通过调整不同气囊的充气量调节手臂横向倾斜角度,从而控制治疗超声探头与手臂上靶区的有效对准。
13.进一步的,所述支撑装置驱动模块通过压力检测模块获取治疗超声探头与手臂皮肤之间的压力值,当压力值超过一定阈值时,停止并限制探头升降电机的移动,并向用户发出警告。
14.进一步的,所述手臂支撑气囊包括4个可以控制充气量的充气气囊,分别分布位于手臂的两侧及两侧下方。
15.进一步的,所述主控系统模块其被编程为根据用户输入的设定参数和控制指令,分别对治疗超声模块、成像超声模块、手臂支撑装置进行对应的参数设定和指令控制。
16.进一步的,所述人机交互模块包括显示器、触摸屏、按键,人机交互模块用于接收用户输入的设定参数、控制指令,并传输给主控系统模块;其中设定参数包括设定超声能量、设定治疗时间、设定贴合压力,设定超声入射角度。
17.进一步的,所述治疗超声探头采用可拆卸安装结构,其内部设有角度检测模块,所述角度检测模块可检测治疗超声探头的倾斜角度。
18.更进一步的,所述成像超声模块用于对治疗靶区进行超声图像成像,为用户进行治疗规划提供辅助;所述成像超声探头内部设有角度检测模块,角度检测模块可检测成像超声探头的倾斜角度,用户可根据所检测到的倾斜角度来设置治疗超声探头所需的设定超声入射角度。
19.更进一步的,当治疗超声探头与成像超声探头的倾斜角度差异超过设定阈值时,主控系统模块控制治疗超声模块停止工作,并向用户发出警告。
20.本发明的有益效果是如下:
21.(1)集成有成像超声,用户在实施超声理疗之前,可以方便的观测血管造瘘口内部
情况,为后续治疗提供超声影像指导;
22.(2)成像超声探头具有倾斜角度检测功能,用户在使用成像超声观察治疗区域时,可以测量最佳的超声波入射角度;
23.(3)治疗超声探头具有倾斜角度检测功能,结合手臂支撑装置,用户可以根据所测量的最佳超声波入射角度,控制治疗超声探头的姿态,从而使超声波可以准确的到达内部的治疗靶区,解决治疗靶区超声覆盖不足,非治疗区域受到过多超声辐射的问题;
24.(4)手臂支撑装置和支撑气囊可以调节患者手臂处于自然放松状态,使患者能够完成长时间的超声理疗;
25.(5)治疗超声探头和皮肤之间的压力检测功能,可以避免因耦合过紧或过松导致的治疗问题。
附图说明
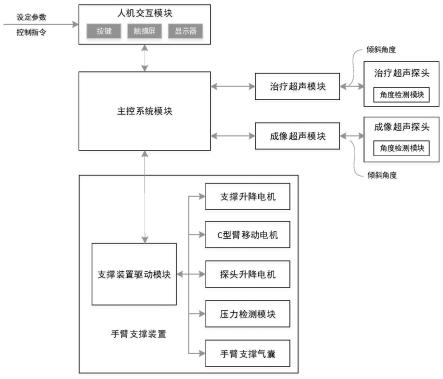
26.图1本发明的系统架构示意图;
27.图2本发明实例中手臂支撑装置的结构示意图;
28.图3手臂支撑气囊应用示意图。
29.图中标记为:1为支撑装置驱动模块,2为c型臂移动电机,3为探头升降电机,4为压力检测模块,5为手臂支撑气囊,5-1、5-2、5-3、5-4为不同位置的可充气气囊,6为支撑升降电机,7为手臂横截面,8为治疗超声探头。
具体实施方式
30.下面结合附图和具体实施例对本发明进行详细说明。
31.如图1所示,本发明提供了一种带支撑装置的超声理疗仪,其系统架构包括:主控系统模块、人机交互模块、手臂支撑装置、治疗超声模块、治疗超声探头、成像超声模块、成像超声探头。
32.所述主控系统模块,分别与人机交互模块、支撑装置驱动模块、治疗超声模块、成像超声模块电气相连。主控系统模块被编程为根据用户输入的设定参数和控制指令,分别对治疗超声模块、成像超声模块、手臂支撑装置进行对应的参数设定和指令控制;其被编程为从治疗超声模块、成像超声模块、手臂支撑装置获取状态信息,并传输给人机交互模块。
33.所述人机交互模块包括显示器、触摸屏、按键。人机交互模块用于接收用户输入的设定参数、控制指令,并传输给主控系统模块,并通过显示器显示状态信息。
34.本实施例中,所述设定参数包括设定超声能量、设定治疗时间、设定贴合压力、设定超声入射角度,所述状态信息包括实际入射角度、实际超声能量、实际治疗时间、实际贴合压力、警告信息。
35.所述成像超声模块,用于对治疗靶区进行超声图像成像,为用户进行治疗规划提供辅助。
36.所述成像超声探头,设计有角度检测模块。角度检测模块可以检测所述成像超声探头的倾斜角度。
37.所述治疗超声模块,根据超声能量、治疗时间,发射脉冲信号给治疗超声探头,并检测其自身和治疗超声探头的工作状态,并将工作状态信息传输给主控系统模块。所述工
作状态包括发射频率、电压、电流、功率、温度、相位。
38.所述治疗超声探头,设计有角度检测模块。所述角度检测模块可以检测所述治疗超声探头的倾斜角度。
39.其中,所述角度检测模块可采用加速度传感器、电子水平仪,或其他可以检测倾斜角度的装置。本实施例角度检测模块优选加速度传感器。
40.所述手臂支撑装置包括支撑装置驱动模块、支撑升降电机、c型臂移动电机、探头升降电机、压力检测模块、手臂支撑气囊。
41.所述支撑装置驱动模块,其被设计为接收所述主控系统模块传输的控制指令,并根据控制指令分别对所述支撑升降电机、c型臂移动电机、探头升降电机、手臂支撑气囊进行控制。
42.如图2所示,所述治疗超声探头可以安装到手臂支撑装置的探头升降电机上。
43.所述支撑升降电机,用于控制所述手臂支撑装置的高度。在实际场景中,通过调整手臂支撑装置的高度,可以适应不同的手臂摆放高度,以使手臂处于自然伸展状态。
44.所述c型臂移动电机,用于控制所述治疗超声探头的对准角度。用户可以通过调整治疗超声探头的对准角度,使超声波的辐照角度符合设定超声入射角度。
45.所述探头升降电机,用于控制所述治疗超声探头的高度。通过调整治疗超声探头的高度,控制治疗超声探头和手臂皮肤之间的贴合程度,从而保证超声波的皮肤有效透过效率。
46.所述压力检测模块,用于检测治疗超声探头与手臂皮肤之间的压力值。用户可以根据检测到的压力值来进一步调整治疗超声探头的高度,从而使压力值处于手臂皮肤可耐受的适宜范围内。
47.如图3所示,所述手臂支撑气囊包括4个可以控制充气量的充气气囊,分别分布位于手臂的两侧及两侧下方。通过调整不同气囊的充气量实现对手臂横向倾斜角度的调整。当治疗超声探头的对准角度超出c型臂移动电机的最大限度,可以进一步的通过调整不同气囊的充气量调节手臂横向倾斜角度,从而控制治疗超声探头与手臂上靶区的有效对准。
48.结合图2、图3,在操作机器过程中,用户首先通过成像超声探头探查治疗靶区内部组织情况,如血管造瘘伤口内部组织,并寻找最佳的超声入射角度,并通过角度检测模块获取当前成像超声探头的倾斜角度a。
49.进一步的,通过操作c型臂移动电机调整治疗超声探头的倾斜角度b,当a和b的差值小于设定阈值时,即认为完成对准。在本实例中,设定阈值为1
°
。
50.另外,在操作机器过程中,当治疗超声探头与成像超声探头的倾斜角度差异超过设定阈值时,主控系统模块控制治疗超声模块停止工作,并向用户发出警告。
51.所述支撑装置驱动模块通过所述压力检测模块获取所述治疗超声探头与手臂皮肤之间的压力值,当压力值超过一定阈值时,停止并限制探头升降电机的移动,并向用户发出警告。
52.以上显示和描述了本发明的基本原理、主要特征和优点。本领域的普通技术人员应该了解,上述实施例不以任何形式限制本发明的保护范围,凡采用等同替换等方式所获得的技术方案,均落于本发明的保护范围内。
53.本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。