1.本发明涉及一种基于扩张状态观测器的组合体姿态有限时间控制方法,尤其涉及一种面向空间机械臂捕获大挠性失效卫星后形成的组合体的基于扩张状态观测器的有限时间姿态控制方法,属于航空航天技术领域。
背景技术:
2.随着航天事业的发展,在轨航天器的数目日益增多,随之而来的是大量空间碎片,例如失效卫星、火箭上面级等。这些空间碎片对空间环境产生了显著的影响,严重威胁着在轨航天器的安全、制约了人类对空间资源的可持续利用。因此,空间碎片清除问题已成为目前航天领域所面临的关键问题之一。目前已有多种清除方式被提出,其中较为典型的是基于空间机械臂的刚性捕获方式,该方式具有精度较高、捕获可控、抓捕操作可逆等优势。
3.目前已有许多学者面向利用空间机械臂实现失效卫星抓捕的过程开展了大量研究。值得注意的是,利用空间机械臂完成失效卫星抓捕后形成的组合体,由于机械臂和失效卫星帆板的大挠性特点,相比于抓捕完成前的“服务星 机械臂”系统,抓捕后形成的复杂多柔体系统存在系统参数跃变、失效卫星挠性附件模态及频率未知等问题,传统的动力学方法无法得到显式的动力学方程,面对未知扰动的控制系统也不能及时、快速地加以补偿。
技术实现要素:
4.本发明的主要目的是提供一种基于扩张状态观测器的组合体姿态有限时间控制方法,通过设计扩张状态观测器跟踪组合体的状态,进而设计组合体有限时间控制器,利用扩张状态观测器对实时观测得到的总扰动量进行快速估计和补偿,并通过有限时间控制方法加快组合体姿态稳定的收敛速度,提高捕获后组合体系统的抗干扰性和鲁棒性,实现对机械臂捕获大挠性失效卫星后的组合体的高精度姿态稳定控制。
5.本发明的目的是通过下述技术方案实现的。
6.本发明公开的基于有限时间控制的失效卫星捕获后组合体姿态控制方法,包括以下步骤:
7.步骤一:基于广义惯性力的自动组集算法建立柔性多体系统的动力学方程,即利用组合体系统的偏速度矩阵、偏角速度矩阵和模态选择矩阵先得到单体对组合体系统广义惯性力的贡献,进一步得到单个柔体或刚体对组合体系统质量矩阵和广义惯性力非线性项的贡献,较之递推算法能够给出组合体系统显式的动力学方程,从而便于步骤二进行控制器设计。
8.基于广义惯性力的自动组集算法建立组合体系统的动力学方程为
[0009][0010]
其中:是系统总体的质量矩阵;u=[u
1t u
2t
…unt
]
t
,是系统广义速度依次排列组成的列阵;fa是系统的广义主动力,包括外界施加的力和力矩,以及弹性体的广义
内力项;是系统广义惯性力的非线性项。其中,
[0011][0012][0013]
其中,和是坐标系fj相对于惯性系fe的速度和角速度;和定义为坐标系fj的偏速度矩阵和偏角速度矩阵,mj为体j的质量;δj为体j的模态选择矩阵;为体j变形后相对于本体系的静矩;为体j的模态动量系数;jj为体j变形后,相对于本体系的惯性张量;为体j变形后的模态角动量系数;ej为模态质量,如果是正则模态,则为单位阵。
[0014]
步骤二:基于步骤一建立的组合体系统的显式动力学方程,推导设计高精度高效率的扩张状态观测器,对实时观测得到的总扰动量进行快速估计和补偿,进而设计组合体有限时间控制器,加快组合体姿态稳定的收敛速度。通过在组合体系统姿态控制回路中增加扩张状态观测器和有限时间控制器,提高捕获后组合体系统的抗干扰性和鲁棒性,实现对机械臂捕获大挠性失效卫星后的组合体的高精度姿态稳定控制。
[0015]
所述组合体有限时间控制器采用双闭环姿态稳定控制器。内环以服务星的三轴惯性角速度为输入,利用二阶扩张状态观测器,输出不确定量的估计值,所述不确定量在外环反馈控制器输出控制量中加以补偿,能够提高姿态控制的精度。
[0016]
步骤2.1:基于建立的组合体系统的动力学方程推导得到关于角速度的一阶微分方程。
[0017]
控制器设计模型由动力学方程推导为关于角速度ω的一阶微分方程
[0018][0019]
其中,ub为控制量,为已知非线性项,ab(t)则为动力学方程中总的不确定量。其中,
[0020]
ub=b0t
[0021][0022]ab
(t)=bfb(
·
) δbt-δbfb(ω)
[0023]
b=(i
0t
δi
0t
)-1
[0024][0025]
δb=b-b0[0026]
其中,t为控制力矩;fb(
·
)为系统总的干扰量;i
0t
为系统总惯量矩阵中的已知部
分,取为机械臂处于标称位置时不考虑弹性位移的相应取值。
[0027]
步骤2.2:基于建立的组合体系统的动力学方程设计扩张状态观测器,采用内环补偿加外环反馈的双闭环控制。内环补偿环节采用二阶扩张状态观测器eso2,对组合体系统的三个通道均配置相同结构相同参数的二阶扩张状态观测器eso2:
[0028]eb0
=z
b1-yb[0029][0030][0031]
其中,β
b1
>0、β
b2
>0、0<α
b0
<1、δ
b0
均为标量。e
b0
、z
b1
、z
b2
、均为3
×
1的向量。其中,
[0032]
yb=ω=[ω
x ω
y ωz]
t
[0033][0034][0035]
需选取合适参数β
b1
,β
b2
,α
b0
,δ
b0
,满足稳定性条件:
[0036][0037]
使得稳态时,状态z
b2
收敛于ab(t)。利用估计值z
b2
,对组合体系统实施动态反馈补偿律:
[0038]
ub=u
b0-z
b2
[0039]
外环反馈控制器设计为
[0040][0041]
其中,
[0042][0043][0044][0045][0046]
[0047]
其中,“s”表示“sin”,“c”表示“cos”。
[0048]
通过所述扩张状态观测器对实时观测得到的总扰动量进行快速估计和补偿。
[0049]
步骤2.3:在步骤2.2设计的扩张状态观测器基础上,对组合体系统的三个通道均采用有限时间控制律设计稳定的组合体有限时间控制器,加快组合体姿态稳定的收敛速度。
[0050]
考虑非线性系统f(0)=0,x∈rn,非线性系统存在一个定义在原点的领域上的c1光滑的函数v(x),并且存在实数c>0和0<α<1,使得v(x)在上正定和在上半负定,则该非线性系统的原点是有限时间稳定的。停息时间依赖于系统初始值x(0)=x0,其上界是
[0051][0052]
其中x0是原点某一开领域中的任何一点。如果并且v(x)是径向无界的(即,当||x||
→
∞时,v(x)
→
∞),则该非线性系统的原点是全局有限时间稳定的。
[0053]
设计基于状态反馈的有限时间控制律
[0054][0055]
其中,α∈(0,1),
[0056]
对每个通道均采用有限时间控制律,较之传统的pd控制器,收敛速度快、抗干扰和鲁棒性能好。
[0057]
步骤2.3得到的有限时间控制器是稳定的,稳定性分析过程如下
[0058]
选取正定lyapunov函数
[0059][0060]
v(x1,x2)的一阶导数为
[0061][0062]
其中,
[0063][0064][0065]
将上式带入,得v(x1,x2)沿着系统闭环轨迹的一阶导数为
[0066][0067]
由上式易见,对于固定的α∈(0,1),是连续的。且对于k>0,v(x1,x2)易证有如下性质
[0068]
v(k
2-α
x1,kx2)=k
3-α
v(x1,x2)
[0069][0070]
观察v(x1,x2)和的表达式,若r>1,且s<1,则v和在集合
[0071][0072]
上均为正定,其中集合ο为围绕原点的一个封闭曲线。
[0073]
由于对于任意的存在k>0使得(k
2-α
x1,kx2)∈o。因此,由上述性质可得v正定,负定。
[0074]
v为径向无限大函数,因此集合v={(x1,x2)|v(x1,x2)=1}是紧的。由于是连续的,易得在集合v上能够取到最大值。定义
[0075][0076]
由于易得c>0,且定义简记为由上述性质得
[0077][0078][0079]
因此,得
[0080][0081]
因此,
[0082][0083]
得有限时间控制器能够在有限时间稳定至原点(0,0)。注意到v是径向无限大函数,易得有限时间控制器是全局稳定的。
[0084]
有益效果:
[0085]
1、本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法,通过设计扩张状态观测器跟踪组合体的状态,进而设计组合体有限时间控制器,利用扩张状态观测器对实时观测得到的总扰动量进行快速估计和补偿,并通过有限时间控制方法加快组合体姿态稳定的收敛速度,提高捕获后组合体系统的抗干扰性和鲁棒性,实现对机械臂捕获大挠性失效卫星后的组合体的高精度姿态稳定控制。
[0086]
2、本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法,采用双闭环姿态稳定控制器。内环以服务星的三轴惯性角速度为输入,利用二阶扩张状态观测器,输出不确定量的估计值,所述不确定量在外环反馈控制器输出控制量中加以补偿,能够提高姿态控制的精度。
[0087]
3、本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法,在设计的高精度高效率扩张状态观测器基础上,对组合体系统的三个通道均采用有限时间控制律设计稳定性的组合体有限时间控制器,加快组合体姿态稳定的收敛速度。对每个通道均采用有限时间控制律,较之传统的pd控制器,收敛速度快、抗干扰和鲁棒性能好。
[0088]
4、本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法,将二阶扩张状态观测器与有限时间控制器相结合,能够对组合体系统未知扰动进行估计,并在控制中加以补偿,且能够使状态误差在有限时间内快速完成收敛,实现对组合体姿态的高精度控制。
[0089]
5、本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法,基于广义惯性力的自动组集算法建立柔性多体系统的动力学模型,即利用系统的偏速度矩阵、偏角速度矩阵和模态选择矩阵先得到单体对系统广义惯性力的贡献,进一步得到单个柔体或刚体对系统质量矩阵和广义惯性力非线性项的贡献,较之递推算法能够给出系统显式的动力学方程,提高动力学方程求解的效率和精度,从而便于进行控制器设计,适应对实时性要求高的星载环境。
附图说明
[0090]
图1为本发明实施例中捕获后组合体的构型图。
[0091]
其中:a——服务星;b——失效卫星;10、13——刚性机械臂;11、12——柔性机械臂;21、31——服务星的柔性帆板;41、51——失效卫星的柔性帆板。
[0092]
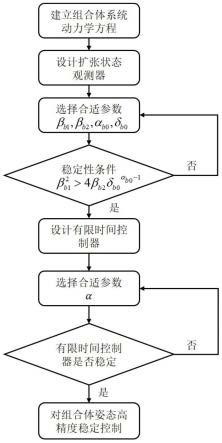
图2为本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法的总流程图。
[0093]
图3为本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法的结构框图。
[0094]
图4为本发明实施例中服务星本体的姿态角变化曲线图。
[0095]
图5为本发明实施例中服务星本体的姿态角速度变化曲线图。
具体实施方式
[0096]
下面结合实施例和附图对本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法作详细说明。
[0097]
本实例所采用的仿真模型为图1所示的组合体模型,由边长2m的服务星及两块挠性帆板、6自由度机械、边长2m的失效卫星及两块挠性帆板组成。其中服务星、失效卫星和两端较短机械臂为刚体,服务星帆板与失效卫星帆板和中间两个较长机械臂视为柔体。
[0098]
取本体星体质量mb=1000kg,主轴转动惯量
[0099]
目标星体质量m
bt
=1500kg,主轴转动惯量
[0100]
帆板质量m
p
=37.6546kg,几何参数取宽为b
p
=1.72m,长为h
p
=6.795m,厚为d
p
=0.002m。
[0101]
考虑机械臂质量参数时,需要考虑铰接对系统质量参数的影响,假设机械臂的三处铰接质量均为m
joint
=1kg。机械臂的内径rm=0.03m,外径rm=0.05m,材料密度ρ=7850kg/m3,长度尺寸参数分别为l
10
=0.2m,l
11
=1m,l
12
=1.2m,l
13
=0.3m。其中,机械臂10、11、12均为柱铰,机械臂13末端为3自由度球铰。
[0102]
各组成部分几何尺寸参数和质量特性参数可以根据研究要求进行改变,但期望目标星体质量特性参数满足大于本体星体,柔性帆板尺寸几何参数大于星体本体以满足研究内容对大挠性附件的要求。
[0103]
如图2所示,本实施例公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法的总流程图,包括如下步骤:
[0104]
步骤一:基于广义惯性力的自动组集算法建立柔性多体系统的动力学方程,即利用组合体系统的偏速度矩阵、偏角速度矩阵和模态选择矩阵先得到单体对组合体系统广义惯性力的贡献,进一步得到单个柔体或刚体对组合体系统质量矩阵和广义惯性力非线性项的贡献,较之递推算法能够给出组合体系统显式的动力学方程,从而便于步骤二进行控制器设计。
[0105]
基于广义惯性力的自动组集算法建立组合体系统的动力学方程为
[0106][0107]
其中:u=[u
1t u
2t
…unt
]
t
,是系统广义速度依次排列组成的列阵,本实施例中的广义速度在表1中给出。是系统总体的质量矩阵;fa是系统的广义主动力,包括外界施加的力和力矩,以及弹性体的广义内力项;是系统广义惯性力的非线性项。
[0108]
表1系统广义速度
[0109][0110]
其中,对于刚体部分,有
[0111][0112][0113]
对于柔性体部分,有
[0114][0115]
[0116]
其中,和是坐标系fj相对于惯性系fe的速度和角速度;和定义为坐标系fj的偏速度矩阵和偏角速度矩阵,mj为体j的质量;δj为体j的模态选择矩阵;为体j变形后相对于本体系的静矩;为体j的模态动量系数;jj为体j变形后,相对于本体系的惯性张量;为体j变形后的模态角动量系数;ej为模态质量,如果是正则模态,则为单位阵。
[0117]
步骤二:基于步骤一建立的组合体系统的显式动力学方程,推导设计高精度高效率的扩张状态观测器,对实时观测得到的总扰动量进行快速估计和补偿,进而设计组合体有限时间控制器,加快组合体姿态稳定的收敛速度。通过在组合体系统姿态控制回路中增加扩张状态观测器和有限时间控制器,提高捕获后组合体系统的抗干扰性和鲁棒性,实现对机械臂捕获大挠性失效卫星后的组合体的高精度姿态稳定控制。
[0118]
步骤2.1:控制器设计模型由动力学方程可推导为关于角速度ω的一阶微分方程
[0119][0120]
其中,ub为控制量,为已知非线性项,ab(t)则为方程中总的不确定量。其中,
[0121]
ub=b0t
[0122][0123]ab
(t)=bfb(
·
) δbt-δbfb(ω)
[0124]
b=(i
0t
δi
0t
)-1
[0125][0126]
δb=b-b0[0127]
其中,t为控制力矩;fb(
·
)为系统总的干扰量;i
0t
为系统总惯量矩阵中的已知部分,可取为机械臂处于标称位置时不考虑弹性位移的相应取值。:
[0128]
步骤2.2:设计扩张状态观测器跟踪组合体的状态,采用内环补偿加外环反馈的双闭环控制,对实时观测得到的总扰动量进行快速估计和补偿。
[0129]
内环补偿环节采用二阶扩张状态观测器,对系统的三个通道均配置相同结构相同参数的二阶扩张状态观测器:
[0130]eb0
=z
b1-yb[0131][0132][0133]
其中,β
b1
>0、β
b2
>0、0<α
b0
<1、δ
b0
均为标量。e
b0
、z
b1
、z
b1
、z
b2
、z
b2
均为3
×
1的向量。其中,
[0134]
yb=ω=[ω
x ω
y ωz]
t
[0135]
[0136][0137]
需选取合适参数β
b1
,β
b2
,α
b0
,δ
b0
,满足稳定性条件:
[0138][0139]
使得稳态时,状态z
b2
收敛于ab(t)。利用估计值z
b2
,对系统实施动态反馈补偿律:
[0140]
ub=u
b0-z
b2
[0141]
内环以服务星的三轴惯性角速度为输入,利用二阶扩张状态观测器,输出不确定量的估计值,所述不确定量在外环反馈控制器输出控制量中加以补偿,以提高姿态控制的精度。
[0142]
外环反馈控制器设计为
[0143][0144]
其中,
[0145][0146][0147][0148][0149][0150]
其中“s”表示“sin”,“c”表示“cos”。
[0151]
通过所述扩张状态观测器对实时观测得到的总扰动量进行快速估计和补偿。
[0152]
步骤2.3:在步骤2.2设计的扩张状态观测器基础上,对组合体系统的三个通道均采用有限时间控制律设计稳定的组合体有限时间控制器,加快组合体姿态稳定的收敛速度。
[0153]
设计基于状态反馈的有限时间控制律
[0154][0155]
其中α∈(0,1),
[0156]
对每个通道均采用有限时间控制律,较之传统的pd控制器,收敛速度快、抗干扰和鲁棒性能好。
[0157]
步骤2.3得到的有限时间控制器是稳定的,稳定性分析过程如下:
[0158]
由上式易见,对于固定的α∈(0,1),是连续的。且对于k>0,v(x1,x2)易证有如下性质:
[0159]
v(k
2-α
x1,kx2)=k
3-α
v(x1,x2)
[0160][0161]
观察v(x1,x2)和的表达式,若r>1,且s<1,则v和在集合
[0162][0163]
上均为正定,其中集合ο为围绕原点的一个封闭曲线。
[0164]
由于对于任意的存在k>0使得(k
2-α
x1,kx2)∈o。因此,由上述性质可得v正定,负定。
[0165]
v为径向无限大函数,因此集合v={(x1,x2)|v(x1,x2)=1}是紧的。由于是连续的,易得在集合v上能够取到最大值。定义
[0166][0167]
由于易得c>0,且定义简记为由上述性质可得:
[0168][0169][0170]
因此,可得:
[0171][0172]
因此,
[0173][0174]
能够得系统有限时间稳定至原点(0,0)。注意到v是径向无限大函数,易得系统是全局稳定的。
[0175]
结合图3的基于扩张状态观测器的组合体姿态有限时间控制方法结构框图说明本实施例的实施方式,控制方法与实现方法与发明内容相同。
[0176]
本实施例中考虑机械臂各关节锁定时的情况,仿真任务为服务星本体到达期望姿
态。设置服务星初始姿态角为[π/35,π/60,-π/100]
t
,初始角速度为[0,0,0]
t
。本实施例中控制器参数设定如下:β
b1
=200,β
b2
=2,α
b0
=0.5,δ
b0
=5
×
10-8
,α=0.8。
[0177]
经过50s仿真,结果表明,本实施例中,本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法能实现对组合体姿态的稳定控制。图4表明,本实施例中的控制方案能实现对于服务型本体的姿态稳定控制。图5表明服务星在控制器的作用下角速度能快速收敛到平衡点。
[0178]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。