1.本发明涉及自动化控制及电机控制技术,特别是涉及一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法。
背景技术:
2.超声电机激励信号受内部压电陶瓷片的工作频率限制,同型号但不同批次超声电机的激励信号频率会因加工工艺而存在差异。同时,随着运行过程中摩擦材料的损耗和温度上升等原因,超声电机的共振频率点会发生偏移。因此,超声电机工作过程中激励信号的频率范围是实时变化的。超声电机的这一特点对伺服系统的自适应度提出了更高的要求。
3.此外,超声电机加载瞬间和换向过程中存在一段无法工作的激励频率段,即死区。目前针对死区导致的不连续运动状态的改进算法有:采用滑模控制设计变结构系统观测器削弱死区影响,并实时调节滑模控制器状态变量,实现位置的精确控制;进一步增加输入参数数目,基于频率和相位设计二阶滑模控制方法;将输出关于输入的分段函数表达式,改写为条件导数形式的一阶关系式,再利用状态观测器实现对超声电机的位置控制,回避了因为输出关于输入不可微而限制了控制策略实施的情况。
4.共振频率点的变化和死区的存在均表现为对超声电机激励频率的限制,目前的控制算法主要针对已经存在的频率限制设计控制算法。考虑到激励频率范围难以通过解析式表达,为了进一步提高伺服系统的控制精度,有必要将时变的激励频率范围纳入控制策略中,以激励频率为约束条件寻找满足符合输出性能的输入。
技术实现要素:
5.发明目的:本发明的目的是提供一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法,弥补了经典超声电机伺服系统的无模型控制方法不能处理被控输入受限应用背景的缺陷。
6.技术方案:本发明的一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法,包括以下步骤:
7.s1、初始化伺服系统,包括设定初始化状态估计步长因子η、状态估计权重因子μ、输入估计权重因子β和伺服系统局部特征参数φ(k);
8.s2、预测伺服系统实时运行状态,并对预测的伺服系统实时运行状态进行纠偏;
9.s3、构造关于输入量的拉格朗日型增广罚函数表达式作为受限输入估计的等价无约束变式;
10.s4、选择最速-下降牛顿法寻找拉格朗日型增广罚函数的最优解,最速-下降牛顿法寻优初始化,定义粒子的移动方向为d、移动步长为α;在可行域内选择任意一点作为寻优的起点x0,设计初始移动步长为α0=1,规定寻优误差ε=1
×
10-2
;
11.s5、最优解判别:计算拉格朗日型增广罚函数关于输入估计值的一阶导数,若计算
结果不超过寻优误差ε,则认为此时极小值点xi为近似最优解x
*
,直接执行步骤s9;否则,顺序执行步骤s6;
12.s6、计算粒子移动方向:若关于第i次迭代粒子的移动方向di的等式g
idi
gi=0有解且gi为拉格朗日型增广罚函数关于输入估计值的二阶导数,gi为拉格朗日型增广罚函数关于自变量的一阶导数,则执行s7,否则di:=-gi,再执行s7;
13.s7、计算粒子移动步长:以armijo准则为判据,设定判别系数和步长衰减系数,计算第i次迭代粒子的移动步长αi;
14.s8、更新粒子位置:规定粒子每次迭代按照线性规则移动,xi为第i次迭代粒子的位置,x
i 1
为第i 1次迭代粒子的位置,αi为第i次迭代粒子的移动步长,di为第i次迭代粒子的移动方向,依据线性规则更新粒子位置,并返回步骤s5执行,直到超过规定迭代次数;
15.s9、拉格朗日型增广罚函数寻优判别;若近似最优解x
*
满足满足a=f
l
和b=fh分别是超声电机允许工作频率的下限和上限,σj是第j次构造拉格朗日型增广罚函数表达式时的惩罚因子,λj为第j次构造拉格朗日型增广罚函数表达式时的拉格朗日乘子,则认为近似最优解x
*
为本轮寻优的最优解u(k)=x
*
,直接执行步骤s11;否则,顺序执行步骤s10;
16.s10、更新损失函数系数:分别更新损失函数系数σ
j 1
=2σj,λ
j 1
=λ
j-σjmin{(x
i-a)(b-xi),λj/σj},σ
j 1
是为寻找xi最优解时,第j 1次构造拉格朗日型增广罚函数表达式时的惩罚因子,λj是为寻找xi最优解时,第j 1次构造拉格朗日型增广罚函数表达式时的拉格朗日乘子,迭代时重复步骤s3至步骤s5;
17.s11、控制状态监测:依据控制要求,选择稳定时间、平均稳态误差、超调量、上升时间、单位控制时间中的全部或部分控制指标实时监测伺服系统运行状态,若控制效果不达标,执行步骤s12,否则,进入下一个(k 1)系统时刻,返回步骤s2,直到接收到控制结束指令;
18.s12、控制参数修正:依据各个控制参数对于伺服系统电机转速控制效果的影响规律,在各控制参数定义允许范围内,调节控制参数取值;随后系统进入下一个(k 1)系统时刻,返回步骤s2,直到接收到控制结束指令。
19.进一步的,步骤s1中初始化的状态估计步长因子η、状态估计权重因子μ和输入估计权重因子β为不大于1的随机数;初始化的伺服系统局部特征参数φ(1)为非正随机数。
20.进一步的,步骤s2中伺服系统实时运行状态的预测公式为:
[0021][0022]
其中,φ(k-1)为k-1时刻伺服系统局部特征参数,δu(k-1)=u(k-1)-u(k-2)是k-1时刻伺服系统输入的变化量,y(k)是k时刻伺服系统输出,y(k-1)为k-1时刻伺服系统输出。
[0023]
进一步的,步骤s2中伺服系统实时预测状态纠偏的方法为:
[0024][0025]
其中,sign(φ(k))为关于伺服系统局部特征参数φ(k)的符号函数,该符号函数保证伺服系统局部特征参数始终非正,为纠偏后的伺服系统局部特征参数。
[0026]
进一步的,步骤s3中拉格朗日型增广罚函数表达式为:
[0027][0028]
其中,xi为关于输入u(k)估计值第i次迭代估计的最优解,和表征伺服系统运行状态,为纠偏后的伺服系统局部特征参数,w(k)=ye(k 1)-y(k) φ(k)u(k-1),ye(k 1)是k 1时刻期望输出,σ为罚函数惩罚因子,λ为拉格朗日乘子,在每次寻优迭代过程中σ和λ按照步骤s10更新,a=f
l
和b=fh分别是超声电机允许工作频率的下限和上限。
[0029]
进一步的,步骤s5中拉格朗日型增广罚函数关于输入估计值的一阶导数gi的计算公式为:
[0030][0031]
其中,p为拉格朗日型增广罚函数,xi为关于输入u(k)估计值第i次迭代估计的最优解,和表征伺服系统运行状态,为纠偏后的伺服系统局部特征参数,w(k)=ye(k 1)-y(k) φ(k)u(k-1),ye(k 1)是k 1时刻期望输出,σ为罚函数惩罚因子,λ为拉格朗日乘子,σ和λ在每次寻优迭代过程中按照步骤s10更新,a=f
l
和b=fh分别是超声电机允许工作频率的下限和上限。
[0032]
进一步的,步骤s6中拉格朗日型增广罚函数关于输入估计值的二阶导数gi的计算公式为:
[0033][0034]
其中,p为拉格朗日型增广罚函数,xi为关于输入u(k)估计值第i次迭代估计的最优解,和表征伺服系统运行状态,为纠偏后的伺服系统局部特征参数,w(k)=ye(k 1)-y(k) φ(k)u(k-1),ye(k 1)是k 1时刻期望输出,σ为罚函数惩罚因子,λ为拉格朗日乘子,σ和λ在每次寻优迭代过程中按照步骤s10更新,a=f
l
和b=fh分别是超声电机允许工作频率的下限和上限。
[0035]
本发明的一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优系统,包括:
[0036]
控制器初始化模块,用于初始化控制器的控制参数,包括状态估计步长因子η、状
态估计权重因子μ、输入估计权重因子β和伺服系统局部特征参数φ(k);
[0037]
预测模块,用于预测伺服系统实时运行状态;
[0038]
纠偏模块,用于对预测的伺服系统实时运行状态进行纠正;
[0039]
增广罚函数构建模块,用于构造关于输入量的拉格朗日型增广罚函数;
[0040]
增广罚函数寻优模块,用于对最速-下降牛顿法寻优初始化,并选择最速-下降牛顿法寻找增广罚函数的最优解;
[0041]
监测模块,用于选择控制指标实时监测伺服系统运行状态;
[0042]
控制参数修正模块,用于根据各个控制参数对于伺服系统电机转速控制效果的影响规律,在各控制参数定义允许范围内,调节控制参数取值。
[0043]
本发明的一种装置设备,包括存储器和处理器,其中:
[0044]
存储器,用于存储能够在处理器上运行的计算机程序;
[0045]
处理器,用于在运行所述计算机程序时,执行如上述一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法的步骤。
[0046]
本发明的一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被至少一个处理器执行时实现如上述一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法的步骤。
[0047]
有益效果:与现有技术相比,本发明的技术效果有:(1)本发明采用罚函数方法将关于频率的约束优化问题转化为无约束变式,有助于提高运行状态跟踪准确性;(2)本发明选择牛顿-最速下降法为拉格朗日型损失函数寻优,简化了控制过程,对于提高控制可操作性至关重要;(3)本发明与经典无模型控制算法相比,具有状态跟踪实时性强、估计输入准确度高、控制精度高、自适应能力等优点。
附图说明
[0048]
图1是本发明伺服系统结构框图;
[0049]
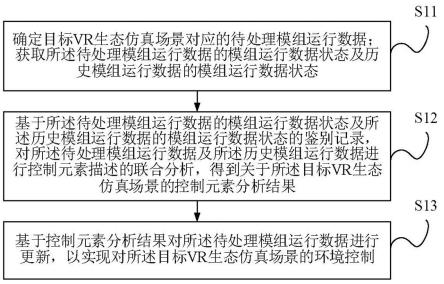
图2是本发明方法流程图;
[0050]
图3是本发明实施例中超声电机跟踪正弦信号空载时实验结果对比图;
[0051]
图4是本发明实施例中超声电机跟踪方波信号空载时实验结果对比图。
具体实施方式
[0052]
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
[0053]
本发明的一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法,在超声电机伺服系统中具体实施时的控制结构如图1所示,该伺服系统包括:超声电机、局部动态特征自适应辨识模块和被控输入拉格朗日-罚函数寻优估计模块,其中,被控输入拉格朗日-罚函数寻优估计模块接受目标输出作为寻找估计输入的参考值,采用拉格朗日罚函数寻优估计方法估计输入值,超声电机选择估计输入值作为激励电信号频率完成伺服系统输出;局部动态特征自适应辨识模块采用局部动态特征自适应辨识方法分析估计输入和对应伺服系统输出的数值关系,获得系统局部特征参数,与系统历史输出共同指导拉格朗日罚函数寻优估计方法调节寻优参数。
[0054]
本发明的一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法,借助拉格朗日乘子法,完成受约束工作频率的寻优问题,实现超声电机伺服控制。在不依赖系统物理模型的前提下,通过分析伺服系统输入输出数据,获得电机运行状态表征参数;基于罚函数将关于频率的约束优化问题转化为无约束变式,选择牛顿-最速下降法为拉格朗日型增广罚函数寻优,估计工作频率最优解,最终驱动超声电机工作。本发明方法具有状态跟踪实时性强、估计输入准确度高、控制精度高、自适应能力等优点。如图2所示,具体实施过程如下:
[0055]
步骤1,伺服系统参数初始化。设定初始化控制参数:状态估计步长因子η、状态估计权重因子μ和输入估计权重因子β为不大于1的随机数;设定伺服系统初始化局部特征参数φ(1)为非正随机数。
[0056]
步骤2,预测伺服系统实时运行状态。对于伺服系统,第k(k=2,3,4,
……
)时刻,控制器依据如下迭代公式计算伺服系统局部特征参数φ(k),以表征伺服系统实时运行状态。
[0057][0058]
其中,φ(k-1)为k-1时刻伺服系统局部特征参数,δu(k-1)=u(k-1)-u(k-2)是k-1时刻伺服系统输入的变化量,y(k)是k时刻伺服系统输出,y(k-1)为k-1时刻伺服系统输出。
[0059]
步骤3,伺服系统实时预测状态纠偏。对于k时刻计算的伺服系统局部特征参数φ(k),依据如下规则给予纠正:
[0060][0061]
其中,为纠偏后的伺服系统局部特征参数,sign(φ(k))为关于φ(k)的符号函数,该符号函数保证局部特征参数始终非正,符合超声电机输出与输入负相关的规律,可避免伺服系统发散。
[0062]
步骤4,构造关于输入量的拉格朗日型增广罚函数表达式。依照如下表达式构造受限输入估计的等价无约束变式,本发明选用拉格朗日型增广罚函数表达式。
[0063][0064]
其中,xi为关于输入u(k)估计值第i次迭代估计的最优解,和表征伺服系统运行状态,w(k)=ye(k 1)-y(k) φ(k)u(k-1),ye(k 1)是k 1时刻期望输出,β是输入估计权重因子,σ为罚函数惩罚因子,λ为拉格朗日乘子,在每次寻优迭代过程中σ和λ按照步骤s10更新,a=f
l
和b=fh分别是超声电机允许工作频率的下限和上限。
[0065]
步骤5,最速-下降牛顿法寻优初始化。本发明选择最速下降牛顿法寻找步骤4增广罚函数的最优解。定义粒子x的移动方向为d、移动步长为α,规定粒子每次迭代按照线性规则移动,即xi为第i次迭代粒子的位置,x
i 1
为第i 1次迭代粒子的位置,αi为第i次迭代粒子的移动步长,di为第i次迭代粒子的移动方向。在可行域内选择任意一点
作为寻优的起点x0,设计初始移动步长为α0=1,规定寻优误差ε=1
×
10-2
。
[0066]
步骤6,最优解判别。依照如下公式计算增广函数关于输入估计值的一阶导数gi。若计算结果不超过寻优误差ε,则认为此时近似极小值点x
*
为xi,直接执行步骤10,否则顺序执行步骤7。
[0067][0068]
步骤7,计算粒子移动方向。依据以下公式计算增广函数关于自变量的二阶导数gi。
[0069][0070]
若解关于di的等式g
idi
gi=0有解且则执行步骤8,否则di∶=-gi,再执行步骤8。
[0071]
步骤8,计算粒子移动步长。以armijo准则为判据,计算αi数值,其中设定判别系数为0.55,步长衰减系数为0.4。
[0072]
步骤9,更新粒子数值。依据规则更新粒子数值,并重复步骤6,直到超过规定迭代次数。
[0073]
步骤10,增广函数寻优判别。若近似最优解x
*
满足则认为x
*
为本轮寻优的最优解u(k)=x
*
,直接执行步骤12;否则,顺序执行步骤11。
[0074]
步骤11,更新损失函数系数。分别更新损失函数系数σ
j 1
=2σj,λ
j 1
=λ
j-σjmin{(x
i-a)(b-xi),λj/σj},σj是为寻找xi最优解时,第j次构造拉格朗日型增广罚函数表达式时的惩罚因子,λj是为寻找xi最优解时,第j次构造拉格朗日型增广罚函数表达式时的拉格朗日乘子,σ
j 1
是为寻找xi最优解时,第j 1次构造拉格朗日型增广罚函数表达式时的惩罚因子,λj是为寻找xi最优解时,第j 1次构造拉格朗日型增广罚函数表达式时的拉格朗日乘子,重复步骤4至步骤6。
[0075]
步骤12,控制状态监测。依据控制要求,选择稳定时间、平均稳态误差、超调量、上升时间、单位控制时间中的全部或部分控制指标实时监测伺服系统运行状态。若控制效果不达标,执行步骤13,否则,进入下一个(k 1)系统时刻,重复步骤2至步骤6,直到接收到控制结束指令。
[0076]
步骤13,控制参数修正。依据下表1中总结的各个控制参数对于电机转速控制效果的影响规律,在各控制参数定义允许范围内,调节控制参数取值。随后系统进入下一个(k 1)系统时刻,重复步骤2至步骤6,直到接收到控制结束指令。
[0077]
表1各个控制参数对于电机转速控制效果的影响规律
[0078][0079]
本发明的一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优系统,包括:
[0080]
控制器初始化模块,用于初始化控制器的控制参数,包括状态估计步长因子η、状态估计权重因子μ、输入估计权重因子β和伺服系统局部特征参数φ(k);
[0081]
预测模块,用于预测伺服系统实时运行状态;
[0082]
纠偏模块,用于对预测的伺服系统实时运行状态进行纠正;
[0083]
增广罚函数构建模块,用于构造关于输入量的拉格朗日型增广罚函数;
[0084]
增广罚函数寻优模块,用于对最速-下降牛顿法寻优初始化,并选择最速-下降牛顿法寻找增广罚函数的最优解;
[0085]
监测模块,用于选择控制指标实时监测伺服系统运行状态;
[0086]
控制参数修正模块,用于根据各个控制参数对于伺服系统电机转速控制效果的影响规律,在各控制参数定义允许范围内,调节控制参数取值。
[0087]
本发明的一种装置设备,包括存储器和处理器,其中:
[0088]
存储器,用于存储能够在处理器上运行的计算机程序;
[0089]
处理器,用于在运行所述计算机程序时,执行如上述一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法的步骤,并能达到上述方法一致的技术效果。
[0090]
本发明的一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被至少一个处理器执行时实现如上述一种基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法的步骤,并能达到上述方法一致的技术效果。
[0091]
下面通过实施例详细阐述本发明基于拉格朗日乘子的超声电机无模型伺服系统罚函数寻优方法在超声电机伺服系统中具体实施时的实验结果。
[0092]
图3和图4分别是空载跟踪正弦信号和方波信号的外约束控制方法和本发明基于拉格朗日乘子的无模型罚函数方案特性比较,外约束控制方法将输入约束作为阈值,直接作用于估计输入值,本发明则将约束条件融入算法寻优过程中。两种控制方案均设置了相同的期望输入信号,频率为0.5hz,谷值为5r/min,峰值为85r/min,采样周期均选择为10ms。
分别设定经典无模型控制算法参数为η=1,μ=0.01,ρ=0.8,β=100,基于拉格朗日乘子的无模型罚函数控制算法参数为η=1,μ=0.01,ρ=0.8,β=100,α=2。
[0093]
对比两种算法下的实时误差可以发现:实现相同控制目标,本发明算法的超调量明显低于外约束控制方法,在转速较高时,两种算法的平均稳态误差曲线重合部分较多,彼此误差偏差不大;转速较低时,误差相应增大,其中外约束控制算法对于目标转速的增加更加敏感,特别是对于方波中转速突然降低的部分,误差显著增大,而本发明基于拉格朗日乘子的无模型罚函数方案误差变化不大,性能更加稳定。
[0094]
综上,本发明的一种基于拉格朗日乘子的超声电机伺服系统的无模型罚函数控制方法,是在经典无模型控制算法基础上提出的改进算法,考虑了超声电机系统特征和输入约束要求,综合无模型自适应控制的控制输入估计算法和约束条件构造拉格朗日型增广罚函数,应用拉格朗日乘子法构造拉格朗日型增广罚函数,并通过牛顿法-最速下降法求解等效的无约束问题,最终直接获得满足约束条件的控制输入估计。本发明改进后的方法将输入估计值的约束条件被包含在寻优过程内,输入估计结果可直接作为电机激励信号的工作频率,而不再被输入阈值约束制约,可有效避免状态估计结果失真,基于本发明的仿真验证显示相比于经典无模型自适应控制方法,引入罚函数方法的改进算法超调量大幅减小,控制效果有望改善。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。