技术特征:
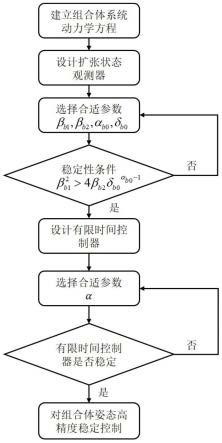
1.基于有限时间控制的失效卫星捕获后组合体姿态控制方法,其特征在于:包括以下步骤,步骤一:基于广义惯性力的自动组集算法建立柔性多体系统的动力学方程,即利用组合体系统的偏速度矩阵、偏角速度矩阵和模态选择矩阵先得到单体对组合体系统广义惯性力的贡献,进一步得到单个柔体或刚体对组合体系统质量矩阵和广义惯性力非线性项的贡献,结合非线性项能够给出组合体系统显式的动力学方程,从而便于步骤二进行控制器设计;步骤二:基于步骤一建立的组合体系统的显式动力学方程,推导设计高精度高效率的扩张状态观测器,对实时观测得到的总扰动量进行快速估计和补偿,进而设计组合体有限时间控制器,加快组合体姿态稳定的收敛速度;通过在组合体系统姿态控制回路中增加扩张状态观测器和有限时间控制器,提高捕获后组合体系统的抗干扰性和鲁棒性,实现对机械臂捕获大挠性失效卫星后的组合体的高精度姿态稳定控制;所述组合体有限时间控制器采用双闭环姿态稳定控制器;内环以服务星的三轴惯性角速度为输入,利用二阶扩张状态观测器,输出不确定量的估计值,所述不确定量在外环反馈控制器输出控制量中加以补偿,能够提高姿态控制的精度。2.如权利要求1所述的基于有限时间控制的失效卫星捕获后组合体姿态控制方法,其特征在于:步骤一实现方法为,基于广义惯性力的自动组集算法建立组合体系统的动力学方程为其中:是系统总体的质量矩阵;u=[u
1t u
2t
…
u
nt
]
t
,是系统广义速度依次排列组成的列阵;f
a
是系统的广义主动力,包括外界施加的力和力矩,以及弹性体的广义内力项;是系统广义惯性力的非线性项;其中,是系统广义惯性力的非线性项;其中,其中,和是坐标系f
j
相对于惯性系f
e
的速度和角速度;和定义为坐标系f
j
的偏速度矩阵和偏角速度矩阵,m
j
为体j的质量;δ
j
为体j的模态选择矩阵;为体j变形后相对于本体系的静矩;为体j的模态动量系数;j
j
为体j变形后,相对于本体系的惯性张量;为体j变形后的模态角动量系数;e
j
为模
态质量,如果是正则模态,则为单位阵。3.如权利要求2所述的基于有限时间控制的失效卫星捕获后组合体姿态控制方法,其特征在于:步骤二实现方法为,步骤2.1:基于建立的组合体系统的动力学方程推导得到关于角速度的一阶微分方程;控制器设计模型由动力学方程推导为关于角速度ω的一阶微分方程其中,u
b
为控制量,为已知非线性项,a
b
(t)则为动力学方程中总的不确定量;其中,u
b
=b0ta
b
(t)=bf
b
(
·
) δbt-δbf
b
(ω)b=(i
0t
δi
0t
)-1
δb=b-b0其中,t为控制力矩;f
b
(
·
)为系统总的干扰量;i
0t
为系统总惯量矩阵中的已知部分,取为机械臂处于标称位置时不考虑弹性位移的相应取值;步骤2.2:基于建立的组合体系统的动力学方程设计扩张状态观测器,采用内环补偿加外环反馈的双闭环控制;内环补偿环节采用二阶扩张状态观测器eso2,对组合体系统的三个通道均配置相同结构相同参数的二阶扩张状态观测器eso2:其中,β
b1
>0、β
b2
>0、0<α
b0
<1、δ
b0
均为标量;e
b0
、z
b1
、z
b2
、均为3
×
1的向量;其中,y
b
=ω=[ω
x ω
y ω
z
]
tt
需选取合适参数β
b1
,β
b2
,α
b0
,δ
b0
,满足稳定性条件:使得稳态时,状态z
b2
收敛于a
b
(t);利用估计值z
b2
,对组合体系统实施动态反馈补偿律:u
b
=u
b0-z
b2
外环反馈控制器设计为其中,
其中,“s”表示“sin”,“c”表示“cos”;通过所述扩张状态观测器对实时观测得到的总扰动量进行快速估计和补偿;步骤2.3:在步骤2.2设计的扩张状态观测器基础上,对组合体系统的三个通道均采用有限时间控制律设计稳定的组合体有限时间控制器,加快组合体姿态稳定的收敛速度;考虑非线性系统f(0)=0,x∈r
n
,非线性系统存在一个定义在原点的领域上的c1光滑的函数v(x),并且存在实数c>0和0<α<1,使得v(x)在上正定和在上半负定,则该非线性系统的原点是有限时间稳定的;停息时间依赖于系统初始值x(0)=x0,其上界是其中x0是原点某一开领域中的任何一点;如果并且v(x)是径向无界的(即,当||x||
→
∞时,v(x)
→
∞),则该非线性系统的原点是全局有限时间稳定的;设计基于状态反馈的有限时间控制律设计基于状态反馈的有限时间控制律其中,α∈(0,1),对每个通道均采用有限时间控制律,较之传统的pd控制器,收敛速度快、抗干扰和鲁棒性能好;步骤2.3得到的有限时间控制器是稳定的,稳定性分析过程如下选取正定lyapunov函数v(x1,x2)的一阶导数为
其中,其中,将上式带入,得v(x1,x2)沿着系统闭环轨迹的一阶导数为)沿着系统闭环轨迹的一阶导数为由上式易见,对于固定的α∈(0,1),是连续的;且对于k>0,v(x1,x2)易证有如下性质v(k
2-α
x1,kx2)=k
3-α
v(x1,x2)观察v(x1,x2)和的表达式,若r>1,且s<1,则v和在集合上均为正定,其中集合ο为围绕原点的一个封闭曲线;由于对于任意的存在k>0使得(k
2-α
x1,kx2)∈o;因此,由上述性质可得v正定,负定;v为径向无限大函数,因此集合v={(x1,x2)|v(x1,x2)=1}是紧的;由于是连续的,易得在集合v上能够取到最大值;定义由于易得c>0,且定义简记为由上述性质得
因此,得因此,得有限时间控制器能够在有限时间稳定至原点(0,0);注意到v是径向无限大函数,易得有限时间控制器是全局稳定的。
技术总结
本发明公开的一种基于扩张状态观测器的组合体姿态有限时间控制方法,属于航空航天技术领域。本发明实现方法为:通过设计扩张状态观测器跟踪组合体的状态,进而设计组合体有限时间控制器;所述组合体有限时间控制器采用双闭环姿态稳定控制器,内环以服务星的三轴惯性角速度为输入,利用二阶扩张状态观测器,输出不确定量的估计值,所述不确定量在外环反馈控制器输出控制量中加以补偿,能够提高姿态控制的精度;利用扩张状态观测器对实时观测得到的总扰动量进行快速估计和补偿,并通过有限时间控制方法加快组合体姿态稳定的收敛速度,提高捕获后组合体系统的抗干扰性和鲁棒性,实现对机械臂捕获大挠性失效卫星后的组合体的高精度姿态稳定控制。度姿态稳定控制。度姿态稳定控制。
技术研发人员:贺子轩 胡权
受保护的技术使用者:北京理工大学
技术研发日:2022.09.09
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。