1.本实用新型涉及机器人技术领域,更具体地说,是涉及一种适用于雨雪天气的机器人。
背景技术:
2.在机器人户外行进过程中,在天气环境变化时,遭遇雨雪、冰雹等天气,机器人如果还按之前的状态进行作业,雨雪就会直接落在机器人本体上。如果机器人本体的密闭性不好的情况下,恶劣天气情况下的雨雪就易造成机器人故障。
3.因此,现有技术还有待于改进和发展。
技术实现要素:
4.本实用新型的目的在于提供一种适用于雨雪天气的机器人,避免在恶劣天气情况下雨雪直接掉落到机器人本体上而造成机器人故障。
5.为实现上述目的,本实用新型采用的技术方案是:
6.本实用新型提供一种适用于雨雪天气的机器人,包括:
7.机器人本体;
8.雨雪感应器,雨雪感应器位于机器人本体的顶端;
9.升降组件,升降组件设置在机器人本体内,且顶端连接雨雪感应器;
10.雨雪遮挡器,雨雪遮挡器连接在升降组件上;
11.升降组件根据雨雪感应器的感应信号而将雨雪遮挡器伸出机器人本体,且雨雪遮挡器用于展开并遮挡机器人本体。
12.在一个实施例中,适用于雨雪天气的机器人还包括:
13.速度控制器,速度控制器设置在机器人本体内,并电连接雨雪感应器;
14.驱动轮组件,驱动轮组件设置在机器人本体的底部,并用于驱动机器人本体移动;
15.速度控制器通过雨雪感应的感应信号而控制驱动轮组件变速。
16.在一个实施例中,适用于雨雪天气的机器人还包括:主控器,主控器设置在机器人本体内,并电连接雨雪感应器和升降组件;
17.雨雪遮挡器包括:
18.充吸两用气泵,充吸两用气泵电连接主控器,并通过根据主控器的信号而充气或吸气;
19.第一气管,第一气管连通充吸两用气泵;
20.伸展气囊,伸展气囊连通第一气管;
21.伸展气囊通过充吸两用气泵的充气而膨胀以覆盖在机器人本体的上方。
22.在一个实施例中,伸展气囊位于雨雪感应器的下方并环绕升降组件设置;
23.当充气后,伸展气囊沿竖直平面的截面形状为锥形。
24.在一个实施例中,雨雪遮挡器还包括:
25.连接气囊,连接气囊的一端连接在升降组件上,另一端连接在伸展气囊上;
26.第三气管,第三气管连通连接气囊;
27.第一电磁换向阀,第一电磁换向阀电连接主控器,且连接第一气管上和第三气管;
28.第一电磁换向阀通过主控器的信号而使第一气管连通充吸两用气泵或使第三气管连通充吸两用气泵。
29.在一个实施例中,连接气囊设置有多个,多个连接气囊环绕升降组件且均连接在伸展气囊上。
30.在一个实施例中,连接气囊位于伸展气囊的上方;
31.当充气后,连接气囊沿竖直平面的截面形状为三角形。
32.在一个实施例中,雨雪遮挡器还包括:
33.第二气管,第二气管具有出气口,第二气管连通伸展气囊,且出气口设置在伸展气囊的外部;
34.第二电磁气阀,第二电磁气阀电连接主控器,并连接在第二气管上,用于关闭或开启出气口。
35.在一个实施例中,充吸两用气泵的进气端设置有加热体,加热体电连接主控器。
36.在一个实施例中,升降组件包括:直线运动模组,直线运动模组沿竖直方向设置在机器人本体内;
37.支撑杆,支撑杆沿竖直方向设置在直线运动模组上,雨雪遮挡器设置在支撑杆上;
38.导向管,导向管设置在机器人本体上,且支撑杆套设在导向管内。
39.本实用新型提供的一种适用于雨雪天气的机器人的有益效果至少在于:在雨雪天气时,通过设置在机器人本体顶端的雨雪感应器所感应到下雨或下雪,并产生感应信号而控制升降组件启动,升降组件驱动雨雪遮挡器上升,使雨雪遮挡器伸出机器人本体,且雨雪遮挡器启动并展开,使雨雪遮挡器遮挡机器人本体,通过雨雪遮挡器将直接掉落在机器人本体上的雨雪进行隔挡,从而使雨雪不会直接掉落到机器人本体上,实现了对机器人本体内的系统以及元器件的保护,避免在恶劣天气情况下雨雪直接掉落到机器人本体上而造成机器人故障。
附图说明
40.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
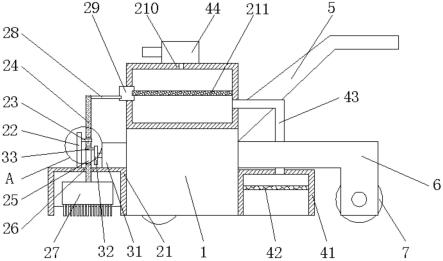
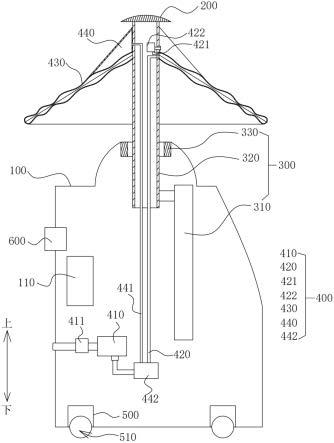
41.图1为本实用新型实施例提供的一种用适用于雨雪天气的机器人在雨雪遮挡器展开状态下的剖视图;
42.图2为本实用新型实施例提供的一种用适用于雨雪天气的机器人在雨雪遮挡器收缩状态下的剖视图;
43.图3为本实用新型实施例提供的一种适用于雨雪天气的机器人的伸展气囊的结构示意图;
44.图4为本实用新型实施例提供的一种适用于雨雪天气的机器人的电路原理框图。
45.其中,图中各附图标记:
46.100、机器人本体;110、主控器;200、雨雪感应器;300、升降组件;310、直线运动模组;320、支撑杆;330、导向管;400、雨雪遮挡器;410、充吸两用气泵;411、加热体;420、第一气管;421、第二气管;422、第二电磁气阀; 430、伸展气囊;431、凸起弧形部;432、下凹弧形部;440、连接气囊;441、第三气管;442、第一电磁换向阀;500、速度控制器;510、驱动轮组件;600、雨雪成像器。
具体实施方式
47.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
48.需要说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接或者间接位于该另一个部件上。当一个部件被称为“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。术语“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。术语“第一”、“第二”仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
49.当机器人在室外工作时,不可避免的会碰到天气变化的情况,例如在雨雪天气进行室外作业时,因此需要对机器人的主要部分(机器人本体)进行保护,而且需要根据天气状况调整机器人的行进速度,根据路面雨雪情况调整机器人的避雨/雪路线。从而避免在恶劣天气情况的机器人进水,保护机器人本体和系统。本实施所提出的适用于雨雪天气的机器人以实现上述功能。
50.请参阅图1、图4,本实施例的适用于雨雪天气的机器人具体包括:机器人本体100,雨雪感应器200,升降组件300,雨雪遮挡器400。机器人本体100 作为机器人的主要部分,其具有安装空间用于安装各电路元件,以及功能模块,以使机器人本体100实现所需要的功能。雨雪感应器200位于机器人本体100 的顶端,当下雨或下雪时,雨水或雪掉落到雨雪感应器200的表面,从而使雨雪感应器200感应到下雨或下雪,并发出相关控制信号,为减少雨雪感应器200 上的积水,雨雪感应器200可以设置为锥形或锥台形。升降组件300设置在机器人本体100内,且顶端连接雨雪感应器200,升降组件300根据雨雪感应器 200的感应信号而将雨雪遮挡器400伸出机器人本体100。雨雪遮挡器400连接在升降组件300上,通过升降组件300的上升而将雨雪遮挡器400伸出到机器人本体100的上方,雨雪遮挡器400通过雨雪感应器200的感应信号而启动并展开,展开的雨雪遮挡器400覆盖在机器人本体100的上方并遮挡机器人本体 100。
51.本实施例提供的一种适用于雨雪天气的机器人的工作原理如下:在雨雪天气时,通过设置在机器人本体100顶端的雨雪感应器200所感应到下雨或下雪,并产生感应信号而控制升降组件300启动,升降组件300驱动雨雪遮挡器400 上升,使雨雪遮挡器400伸出机器人本体100,且雨雪遮挡器400启动并展开,使雨雪遮挡器400遮挡机器人本体100,通过雨雪遮挡器400将直接掉落在机器人本体100上的雨雪进行隔挡,从而使雨雪不会直接掉落到机
器人本体100 上,实现了对机器人本体100内的系统以及元器件的保护,避免在恶劣天气情况下雨雪直接掉落到机器人本体100上而造成机器人故障。
52.请参阅图1、图4,本实施例中的适用于雨雪天气的机器人还包括主控器 110。主控器110设置在机器人本体100内部,并电连接于雨雪感应器200,在下雨/雪时,雨雪感应器200所发出的感应信号被主控器110所接收,主控器110 再向相应的器件发送控制信号,以控制各功能的启动。
53.请参阅图1、图2,适用于雨雪天气的机器人还包括:速度控制器500,驱动轮组件510。速度控制器500设置在机器人本体100内,并通过主控器110 电连接雨雪感应器200;驱动轮组件510设置在机器人本体100的底部,并用于驱动机器人本体100移动。当主控器110接收到雨雪感应器200所发出的感应信号后,并向速度控制器500发送减速信号,速度控制器500接收到减速信号而控制驱动轮组件510变速(如减速),驱动轮组件510减速后,使机器人在雨雪天气减速行驶,保证机器人本体100的户外行驶安全。
54.请参阅图1、图2、图4,本实施例中的适用于雨雪天气的机器人上设置有雨雪成像器600,所述雨雪成像器600用于拍摄路面的图片,并将图片信息发送到主控器110,在主控器110内形成场景图像。主控器110通过算法对场景图像中的积水面积和积雪部分进行识别,因此使场景图像中包括用于表征目标环境中雨或雪集中的积雨区域和积雪区域。场景图像可以理解为目标环境的栅格地图,而实际实施时,可以通过即时定位与地图构建(simultaneouslocalization and mapping,slam)算法,构建目标环境的栅格地图,基于slam 算法,被放置于未知环境中未知位置的机器人,能够在移动的同时,逐步描绘出该未知环境的完全地图,作为栅格地图。此外,可以理解的是,本技术实施例中,场景图像中包括用于表征目标环境中的积雨区域和积雪区域作为障碍区域,以及除障碍区域以外的可行驶区域,障碍区域不仅仅包括雨雪集中区,还可以是墙体、隔断、山石等。在预定的导航地图上标注出积水位置和积雪位置,以及相应的面积轮廓,并对本机器人的前进路线进行调整,使前进路线沿积水区域的边缘或积雪区域边缘偏移一预设距离,从而使机器人在沿重新规划后的前进路线的前进过程中避开积水区域或积雪区域。通过调整机器人的避雨/雪路线,使机器人不会进入到积雨和积雪区域,避免机器人进水而对机器人造成损坏。根据天气与地图导航,根据重新规划的机器人的前进路线以及前进速度,重新确定工作时间与工作计划。从而避免在恶劣天气情况的机器人故障,保护机器人本体100的各装置和系统。
55.请参阅图1、图2、图4,本实施例中的主控器110电连接升降组件300,并在接收到雨雪感应器200的感应信号后,向升降组件300发送启动信号以启动升降组件300,通过升降组件300将雨雪遮挡器400伸出机器人本体100的上方。雨雪遮挡器400具体包括:充吸两用气泵410,第一气管420,以及伸展气囊430。充吸两用气泵410电连接主控器110,并通过根据主控器110的信号而充气或吸气;充吸两用气泵410可以通过主控器110所发送的充气信号而对伸展气囊430进行充气,通过主控器110所发送的吸气信号对伸展气囊430进行吸气。第一气管420连通充吸两用气泵410,具体为充吸两用气泵410具有进气端和出气端,其出气端与第一气管420相连接,伸展气囊430连通第一气管420,当充吸两用气泵410启动并进行充气时,气体通过第一气管420而进入到伸展气囊430,使伸展气囊430膨胀以覆盖在机器人本体100的上方。
56.请参阅图1,具体过程中,当下雨/雪时,主控器110根据雨雪感应器200 的感应信
号,控制升降组件300伸出机器人本体100,伸展气囊430在升降组件300上升后位于机器人本体100的上方,主控器110再向充吸两用气泵410 发送充气指令,充吸两用气泵410在接收到充气指令后启动,使空气从进气端进入而在出气端进入到第一气管420,对伸展气囊430充气而使伸展气囊430 展开,展开的伸展气囊430完全覆盖在机器人本体100的上方。请参阅图2,当雨/雪停时,在预定时间内雨雪感应器200感应不到雨雪,从而使主控器110 向充吸两用气泵410发送吸气指令,充吸两用气泵410在接收到吸气指令后启动,使空气从第一气管420进入到出气端而在进气端输出,将伸展气囊430内的空气吸出而使伸展气囊430压缩,压缩后的伸展气囊430附着在升降组件300 上,主控器110再发送指令控制升降组件300进行下降,重新回到机器人本体100内。
57.本实施例中的伸展气囊430位于雨雪感应器200的下方并环绕升降组件 300设置;当充气后,伸展气囊430沿竖直平面的截面形状为锥形或类似锥形;即最外的侧边为倾斜边,且两侧边的下端之间的距离大于两侧边的上端之间的距离。从而当雨水下落到展开的伸展气囊430上时,可以顺着伸展气囊430的表面掉落,使展开的伸展气囊430的下端所占的区域范围覆盖整个机器人本体 100,从而使下落的水珠能掉落到机器人本体100外。
58.请参阅图1、图3,另外,本实施例中的伸展气囊430的外形还可以设置成其他结构,具体为在一高度方向的横截面上,伸展气囊430包括多个凸起弧形部431和多个下凹弧形部432,多个凸起弧形部431和多个下凹弧形部432间隔设置并依次连接,从而绕升降组件300一圈设置。使下凹弧形部432所在的区域错开机器人本体100上的成像器、感应器的位置。这样设置有以下好处:一是,可以使伸展气囊430表面的雨水和雪能流入到下凹弧形部432内,从而实现集中向下流动,使水和雪流有较大的下滑力,便于伸展气囊430上的雨或雪下排。二是,可以通过下凹弧形部432的延伸方向而错开机器人本体100的重要位置,例如机器人上的成像器的镜头位置,感应器的探头位置,从而可以减少落雨对检测的影响。
59.请参阅图1、图2、图4,本实施例中的雨雪遮挡器400还包括:第二气管421,以及第二电磁气阀422。第二气管421具有出气口,第二气管421连通伸展气囊430,且出气口设置在伸展气囊430的外部;具体为伸展气囊430具有充气通道,充气通道的形状可以是多种形式,只要实现使伸展气囊430在充气后完全展开即可,在充气通道的两端具有连接口,其中之一连接到第一气管 420,而另一连接口连接到第二气管421。第二电磁气阀422电连接主控器110,第二气管421用于放气并通过第二电磁气阀422的控制而开启或关闭。本实施例的出气口位于伸展气囊430的上表面,第二气管421为方便对伸展气囊430 进行放气,放气使,通过出气口对伸展气囊430上表面的冲击,将伸展气囊430 上表面的积水或积雨快速冲掉。
60.出气口进行放气的时候,充吸两用气泵410可以同时充气,这样仍能使伸展气囊430保持展开状态,对雨水也能进行阻挡。
61.请参阅图1、图2、图4,本实施例中的充吸两用气泵410的进气端设置有加热体411,加热体411电连接主控器110。加热体411可以采用两种方式使用,第一种在第二气管421连通的出气口关闭的情况下,充吸两用气泵410对伸展气囊430和连接气囊440进行充气前,先开启预定时间,使周围空气加热,再通过充吸两用气泵410充气,使热空气进入到伸展气囊430和连接气囊440,这样便于化雪。第二种是第二气管421连通的出气口打开的情况下,充吸两用气泵410不断对伸展气囊430内充气,可以一直保证伸展气囊430内是热空气,从而便于化雪。
62.请参阅图1、图2、图4,本实施例中的雨雪遮挡器400还包括:连接气囊 440,第三气管441,以及第一电磁换向阀442。连接气囊440的一端连接在升降组件300上,另一端连接在伸展气囊430上,具体连接气囊440位于伸展气囊430的上方或下方均可,本实施例中以设置在伸展气囊430的上方为例进行结构说明。第三气管441连通连接气囊440,第一电磁换向阀442电连接主控器110,且连接第一气管420上和第三气管441。第一电磁换向阀442通过主控器110的信号而使第一气管420连通充吸两用气泵410或使第三气管441连通充吸两用气泵410。在下雨时,升降组件300上升出机器人本体100后,通过主控器110向第一电磁换向阀442发送控制指令,使第一电磁换向阀442启动,并将第三气管441与充吸两用气泵410进行连通,再控制充吸两用气泵410进行充气,使连接气囊440充气,充气后的连接气囊440向两侧伸开,且与竖直方向呈一定锐角,这样通过连接气囊440对伸展气囊430进行限位,对伸展气囊430进行有效支撑或拉扯,保证伸展气囊430在充气后形状的稳定性;当连接气囊440充气后,再通过主控器110控制第一电磁换向阀442进行换向,使第一气管420与充吸两用气泵410连通,从而对伸展气囊430进行充气。在雨停后,主控器110控制充吸两用气泵410进行吸气,从而先将连接气囊440进行压缩,从而将伸展气囊430先聚拢到升降组件300位置,再对伸展气囊430 进行吸气,从而实现伸展气囊430的压缩。
63.本实施例中的连接气囊440设置有多个,多个连接气囊440环绕升降组件 300且均连接在伸展气囊430上。通过将连接气囊440设置多个,可以同时对所有连接气囊440进行充气和吸气,从而便于将伸展气囊430呈辐射状展开。
64.本实施例中的连接气囊440当充气后,连接气囊440沿竖直平面的截面形状为三角形。连接气囊440的外形轮廓倾斜设置,不仅方便雨水滑落,避免了积雪和积水,而且还能对伸展气囊430实现稳定拉伸。在雨雪较大时也能对机器人本体100进行有效保护。
65.本实施例中通过对连接气囊440的控制,还可以实现抖雨雪的功能,具体为,在雨雪停后,通过充吸两用气泵410对第二气囊进行吸气,使第二气囊收缩,然后再通过充吸两用气泵410对第二气囊进行充气,使第二气囊伸展,反复循环预定次数,从而可以将伸展气囊430上的雨水抖赶紧,再对伸展气囊430 进行吸气,使伸展气囊430收纳。
66.请参阅图1、图2、图4,本实施例的升降组件300包括:直线运动模组310,支撑杆320,以及导向管330。直线运动模组310沿竖直方向设置在机器人本体 100内,且直线运动模组310电连接主控器110,通过主控器110的控制而启动。支撑杆320沿竖直方向设置在直线运动模组310上,雨雪遮挡器400设置在支撑杆320上,导向管330设置在机器人本体100上,且支撑杆320套设在导向管330内。直线运动模组310通过主控器110的控制而驱动支撑杆320进行上升和下降,支撑杆320可以通过导向管330进行导向,且在伸展气囊430在收缩过程中,通过导向管330的限位,进一步压缩伸展气囊430,减少伸展气囊 430所占用的收纳空间。
67.综上所述,在雨雪天气时,通过设置在机器人本体100顶端的雨雪感应器 200所感应到下雨或下雪,通过雨雪感应器200所发出的感应信号后,速度控制器500根据感应信号而控制驱动轮组件510减速,驱动轮组件510减速后,使机器人在雨雪天气减速行驶,保证机器人本体100的户外行驶安全。根据天气与地图导航,根据重新规划的机器人的前进路线以及前进速度,避开雨雪区域而重新确定工作时间与工作计划。从而避免在恶劣天气情况的机器人故障,保护机器人本体100的各装置和系统。通过雨雪感应器200产生感应信号而控
制升降组件300启动,升降组件300驱动雨雪遮挡器400上升,使雨雪遮挡器 400伸出机器人本体100,且雨雪遮挡器400启动并展开,使雨雪遮挡器400 遮挡机器人本体100,通过雨雪遮挡器400将直接掉落在机器人本体100上的雨雪进行隔挡,从而使雨雪不会直接掉落到机器人本体100上,实现了对机器人本体100内的系统以及元器件的保护,避免在恶劣天气情况下雨雪直接掉落到机器人本体100上而造成机器人故障。
68.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。