1.本发明涉及用于机动车辆的轮模块,机动车辆可以借助该轮模块被转向和/或被驱动和/或借助弹簧/阻尼器单元被制动和/或被抑制。
背景技术:
2.从cn206679065 u已知一种具有轮模块的机动车辆,其中,轮模块的轮可以绕竖向转向轴线旋转90
°
,以用于停放机动车辆,甚至是在狭窄的停放空间中进行停放。
3.一直需要能够以节省空间的方式支承产生在轮模块中的力。
技术实现要素:
4.本发明的目的是确定能够节省空间的轮模块的措施。
5.该目的通过具有权利要求1的特征的轮模块来实现。本发明的优选设计在从属权利要求和以下描述中予以说明,这些优选设计中的每个设计均能够以单独形式或组合形式代表本发明的一方面。
6.提供的一个实施方式涉及用于机动车辆、特别是多轨载客机动车辆的轮模块,该轮模块具有能够绕旋转中心旋转并且用于推进机动车辆的轮,并且该轮模块具有摆臂,摆臂能够附接至机动车辆的支承框架,以便绕枢转轴线铰接,并且作用在轮上的力借助于摆臂被支承在支承框架上,其中,轮的旋转中心和摆臂的枢转轴线位于从轮的旋转中心开始的假想径向线上,其中,径向线相对于机动车辆的x-y平面以-40
°
≤α≤35
°
的角度延伸。
7.经由摆臂对轮的机械支承不是沿z方向设置在轮上方,而是尽可能向下。如果摆臂要尽可能靠近轮的圆周铰接在支承框架上,则摆臂的枢转轴线可以在轮壳体的边缘处和/或优选地在支承框架的梁的附近与轮的旋转中心在共同的高度范围内、特别地在x方向上铰接。作用在轮的接触点上的力、特别是转弯时产生的横向力与摆臂铰接在轮上方时显著更低的杠杆臂一起作用,从而可以减少绕基本上沿x方向延伸的弯曲轴线的弯矩。如果摆臂沿z方向铰接在轮上方,则对待支承的接合力有效的杠杆臂将对应于轮半径的至少两倍,而在所选择的角度α下,有效的杠杆臂可以小于轮半径的两倍。在角度α为负值的情况下,当摆臂铰接在包括轮的旋转中心的x-y平面下方时,对待沿y方向支承的接合力有效的杠杆臂在任何情况下都可以小于轮的简单半径。转弯时在摆臂的铰接处产生的弯矩和待支承的横向力可以显著减少,使得摆臂可以被设计成用于较低的载荷。因此,可以减少材料的使用,并且因此降低生产成本和摆臂的空间需求。此外,机动车辆的无论如何都设置的并且限制进入车辆内部的承载部件也可以被功能化以用于摆臂的铰接,因此可以进一步减少部件的数目和空间需求。借助于角度α,摆臂可以在较少使用材料和较小结构空间需求的情况下通过有利于支承作用在轮上的横向力的杠杆臂特别靠近于底层表面铰接,使得节省结构空间的轮模块成为可能。
8.x方向被理解成表示当轮模块安装在机动车辆中时沿着机动车辆的纵向轴线的坐标方向。当机动车辆停放在平坦的、水平延伸的底层表面上时,x方向基本上水平延伸。y方
向被理解成表示当轮模块安装在机动车辆中时沿着机动车辆的横向轴线的坐标方向。当机动车辆停放在平坦的、水平延伸的底层表面上时,y方向基本上水平延伸。z方向被理解成表示当轮模块安装在机动车辆中时沿着机动车辆的竖向轴线的坐标方向。当机动车辆停放在平坦的、水平延伸的底层表面上时,z方向基本上竖向延伸。x方向、y方向和z方向彼此正交对准。x方向和y方向可以跨越x-y平面,当机动车辆停放在平坦的、水平延伸的底层表面上时,该x-y平面在机动车辆的水平平面中沿z方向布置在特定高度处。x方向和z方向可以跨越基本竖向的x-z平面,该平面代表当机动车辆停放在平坦的水平延伸的底层表面上时在y方向上的特定位置处沿机动车辆的纵向方向延伸的机动车辆的纵向截面。y方向和z方向可以跨越基本竖向的y-z平面,该平面代表当机动车辆停放在平坦的、水平延伸的底层表面上时在x方向上的特定位置处沿机动车辆的横向方向延伸的机动车辆的横截面。
9.特别地,角度α为-30
°
≤α≤20
°
、特别地为-20
°
≤α≤0
°
。因此,摆臂可以特别紧密地铰接在支承框架的梁的区域中。因此,在摆臂的连接点处产生的接合力可以经由相应较短的杠杆臂传递至支承框架、特别地传递至梁。
10.优选地,枢转轴线距离底层表面的距离d为60mm≤d≤650mm、特别地为80mm≤d≤590mm、优选地为100mm≤d≤260mm。在距离路面的这样的距离的情况下,作用在摆臂上的横向力可以通过小的杠杆臂支承在支承框架上。此外,距离地面的距离足够大,使得在考虑到地面存在任何颠簸、例如道路中存在坑洞的情况下摆臂不会接触地面。
11.特别优选地,设置有作用在摆臂上并且可以支承在机动车辆的支承框架上的减震器以用于抑制由路面不平引起的轮的振动,其中,出于消散力的目的,轮可以仅经由摆臂和减震器支承在机动车辆的支承框架上。减震器可以对轮施加足够的接触力并且抑制由路面颠簸引起的轮的振动。由于摆臂的铰接支承,因此摆臂可以跟随轮的这些振动。减震器的力方向优选地主要在z方向上对准。因此,减震器可以主要支承在z方向上产生的力,而摆臂可以主要支承在x方向上产生的力。减震器的力方向与从轮的旋转中心延伸至摆臂的旋转轴线的径向线之间的角度大于45
°
、特别地大于60
°
、优选地大于80
°
可以减少减震器中产生的力,并且在低的材料使用和小的空间需求的情况下具有低的侧向载荷的摆臂得到很好的支承。因此不需要并且可以节省另外的支承部件,因此可以保持低的空间需求和生产成本。
12.特别地,设置有以可旋转的方式安装在摆臂上并且附接至轮以用于使轮转向的轮承载件以及附接至摆臂并且作用在轮承载件上以用于使轮承载件旋转的可电操作的转向致动器。转向致动器附接至摆臂并且可以使用摆臂来支承使轮承载件扭转的力。没有设置转向致动器与支承框架的附接,而是仅经由摆臂间接提供。为控制转向致动器而设置的电线可以跟随转向致动器相对于支承框架的由于摆臂的枢转运动的相对运动,并且为此目的,电线可以具有合适的长度和合适的线缆布设。转向致动器可以具有联接至轴的转子,特别地,转向致动器可以布置成轴向地偏移,使得转子的电磁旋转导致附接至轴的轮承载件和连接至轮承载件的轮的旋转。通过使转向致动器相对于轮承载件的旋转轴线轴向地偏移,转向致动器可以设置在轮壳体内的区域中,这意味着不必在轮壳体的外侧为转向致动器预留安装空间。
13.优选地,摆臂具有下支承部和基本上沿z方向设置在下支承部上方的上支承部,以用于使轮绕穿过下支承部和上支承部延伸的z轴转动,其中,下支承部和上支承部经由由摆臂形成的、特别地以弯曲的方式延伸的摆臂本体彼此连接,以使轮能够以至少90
°
转向锁
定,其中,至少一个转向杆从摆臂本体延伸,以用于铰接连接至机动车辆的支承框架。例如,可以与轮壳体的轮廓对应的弯曲的摆臂本体为轮腾出安装空间,即使在超过90
°
的非常大的旋转角度下,轮也可以在该安装空间中旋转。与沿z方向延伸的直杆状摆臂相比,轮不会碰到摆臂的转向杆,因此轮的转向角度不受转向杆的阻挡和限制。由于可以实现大的转向角度,因此机动车辆可以横向于行驶方向行驶和/或原地转动。因此,机动车辆的可操作性可以非常高。
14.特别优选地,为了使轮能够以至少90
°
彼此转向锁定,摆臂在x-y平面内以弓形方式延伸且在y-z平面内以弓形方式延伸。当转向角度非常大时,这可靠地防止了轮与摆臂碰撞。
15.特别地,摆臂是刚性的,特别地形成为一件。摆臂的单侧铰接使得其可以通过将作用在轮上的减震器不支承在摆臂上而是支承在机动车辆的其余部分上、特别地直接或间接支承在支承框架上来避免摆臂的铰接的两件式设计。这经由摆臂提高了力支承件的刚性并且使部件的数目保持最少。
16.一个实施方式涉及一种具有支承框架和支承在支承框架上的用于使机动车辆转向的轮模块的机动车辆,轮模块可以如上所述地设计和开发,其中,每个轮模块能够使轮的转向角度为至少90
°
。由于可以实现大的转向角度,因此机动车辆可以横向于行驶方向行驶和/或原地转动。借助于角度α,轮模块的摆臂可以在较少使用材料和较小结构空间需求的情况下通过有利于支承作用在轮上的横向力的杠杆臂特别靠近于底层表面铰接,使得节省结构空间的机动车辆成为可能。
17.优选地,支承框架具有形成在x方向上的前轮模块与x方向上的后轮模块之间的梁,其中,摆臂在梁的高度处铰接至支承框架、特别地直接铰接至梁。这使得可以经由具有低分量载荷的摆臂支承沿x方向产生在轮上的力。无论如何,所设置的摆臂可以容易地支承由摆臂引入的力和力矩。
附图说明
18.在下文中,参照附图使用优选的示例性实施方式通过示例的方式对本发明进行说明,其中,下面示出的特征既能够单独地也能够组合地代表本发明的一方面。在附图中:
19.图1:示出了电驱动式机动车辆的一部分的示意性侧视图,
20.图2:示出了来自图1的具有不同转向角度的机动车辆的轮模块的示意性平面图,
21.图3:示出了来自图2的轮模块的示意性正视图,
22.图4:示出了来自图1的机动车辆的第一实施方式的简化的详细视图,以及
23.图5:示出了来自图1的机动车辆的第二实施方式的简化的详细视图。
具体实施方式
24.机动车辆10(在图1中仅部分示出)可以设置为例如用于在城市内移动的零排放电动车辆。机动车辆10具有支承框架12,特别地,该支承框架是基本矩形的。例如,直接或间接地支承在支承框架上的轮模块14附接至支承框架的拐角中的每个拐角。在行驶方向上位于前部处的轮模块14与位于后部处的轮模块14之间,支承框架12具有设计为侧构件的梁16,该梁可以界定和/或支承进入到机动车辆内部的入口的下边缘。轮模块14具有可旋转轮18,
该可旋转轮可以借助于转向致动器20进行转向。道路颠簸可以通过作用在轮18上的减震器22来抑制,其中,减震器22在轮18上方至少间接地支承在支承框架12上,以便支承沿z方向产生在轮18上的力。轮18经由摆臂24以铰接的方式支承在支承框架12上,以便支承沿x方向和y方向产生在轮18上的力。由于摆臂24的铰接连接,可以跟随由减震器22实现的轮18的上下运动。
25.如图2中所示,轮18可以转动超过90
°
。因此,机动车辆10也可以横向于行驶方向行驶和/或原地转动。为此目的,特别地,相应的轮模块的每个轮18可以被单独控制和驱动,使得可以针对每个轮18单独指定特定的转向角度和特定的旋转方向,以便实现相对大量的机动车辆。在示出的示例性实施方式中,轮18可以从用于直线向前行驶的位置开始在一个旋转方向上偏转至少90
°
、特别地偏转大约95
°
,并且在另一旋转方向上偏转大约40
°
。为此目的,摆臂24在x-y平面内充分弯曲,使得轮18不会碰到摆臂24。
26.如图3中所示,摆臂24可以具有同样在y-z平面内弯曲的摆臂本体26,铰接在支承框架12上的至少一个转向杆28从该摆臂本体突出。摆臂本体26具有上支承部30和下支承部32,轮承载件34借助于上支承部和下支承部绕基本沿z方向延伸的旋转轴线以可旋转的方式安装。轮承载件34连接至轮18并且可以通过转向致动器20旋转。转向致动器20相对于轮承载件34的旋转轴线偏移并且例如经由齿轮配对和/或牵引驱动基本上轴向地平行于使轮承载件旋转的轴联接。转向致动器20径向向内突出,这节省了安装空间,并且转向致动器20可以在轮18的转向区域之外容易地附接至摆臂24,例如以防止转向致动器20与轮承载件34一起转动。
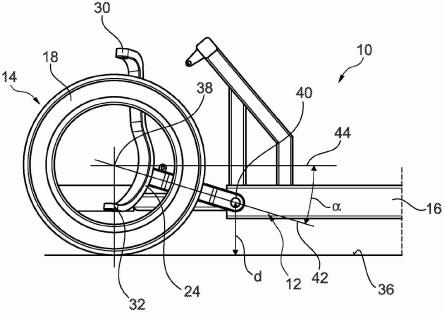
27.在图4中图示的示例性实施方式中,在轮18的轮胎尺寸为125/70r15的情况下,摆臂24以距离基板36的距离d——d=590mm——铰接在支承框架12上。从轮18的旋转中心38延伸穿过支承框架12上的摆臂24的铰接点处的枢转轴线40的假想径向线42相对于x-y平面44倾斜在数学上为正的角度α——α=35
°
,并且靠近于梁16铰接。距离底层表面36的距离d很小,使得在转弯时沿y方向作用在轮18上的横向力仅需要由支承框架12上的摆臂24以小的弯矩支承。
28.在图5中图示的机动车辆10的示例性实施方式中,与图4中所示的机动车辆10的示例性实施方式相比,摆臂24以距离d=80mm和径向线的在数学上为负的角度α——α=-40
°
——直接铰接至支承框架12的梁16,由此,由摆臂24支承至支承框架12的弯矩可以在足够的离地间隙的情况下进一步减少。摆臂也可以以不同的角度α值、例如以α=0
°
的角度铰接。
29.附图标记列表
30.10 机动车辆
31.12 支承框架
32.14 轮模块
33.16 梁
34.18 轮
35.20 转向致动器
36.22 减震器
37.24 摆臂
38.26 摆臂本体
39.28 转向杆
40.30 上轴承部
41.32 下支承部
42.34 轮承载件
43.36 底层表面
44.38 旋转中心
45.40 枢转轴线
46.42 径向线
47.44 x-y平面
48.d 距离
49.α 角度
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
