1.本发明涉及一种畜牧养殖设备,尤其涉及一种基于位姿变换的步进式散养禽类捕获装置。
背景技术:
2.中国是肉鸡生产和消费大国,三黄鸡具有肉质鲜嫩的特点,常以散养的方式饲养,但散养鸡灵活且畏声畏人;在捕获时通常以人工抓捕的方式,其在围捕、抓鸡、装笼的过程中需要耗费大量的劳动力;在此过程中易造成对鸡的外观损伤(如淤血,断翅等),且其鸡喙、利爪容易对工作人员造成损伤。鉴于鸡的蹲伏状态即鸡睡觉、下蛋时的身体姿态,鸡在蹲伏状态时喜静不易动;为此,特提出一种基于位姿变换的步进式散养禽类捕获装置,以解决上述问题。
技术实现要素:
3.本发明的目的是克服上述背景技术的不足,提供一种步进式散养禽类的捕捉装置;该装置应能显著降低鸡的外观损伤率,降低人工工作强度,实现散养禽类捕捉的高效率、低成本。
4.为实现上述目的,本发明采用如下技术方案:
5.一种步进式散养禽类捕捉装置,其特征在于:该装置包括设置在装置底端的底部输送机构、设置在装置前侧且其中的第一矩形板可竖直升降以阻隔鸡群的可升降隔断前门板机构、设置在装置顶部且其中的第二矩形板可竖直升降以压缩鸡群上方空间的龙门式顶板升降机构、设置在装置后侧且其中的第三矩形板可竖直升降以阻隔鸡群的可升降隔断后门板机构及设置在装置左右两侧的侧向限位机构;所有机构合围成一收捕鸡群的封闭空间。
6.所述底部输送机构包括由两个输送带型材支架及连接部件形成的底部骨架、可转动地设置在底部骨架上的输送带、通过传动辊驱动输送带的电机、设置在输送带前侧的倾斜踏板、设置在底部骨架前端的长度可调可收回地脚、设置在底部骨架中部的前脚轮机构以及安装在底部骨架后端的后脚轮机构。
7.所述后脚轮机构包括固定在两个输送带型材支架上的两个第二角度调节器、两端分别与两个第二角度调节器铰接的第二脚轮连接横梁、两端分别通过一伸缩杆连接在第二脚轮连接横梁下侧的第三脚轮连接横梁、安装在第二脚轮连接横梁与第三脚轮连接横梁之间的小型千斤顶以及分别固定在第三脚轮连接横梁两端下侧的两个万向轮。
8.进一步地,所述可升降隔断前门板机构包括分别竖直且对称安装在两个输送带型材支架前侧上方的两个第一型材立柱、一一安装在两个第一型材立柱上的第一直线导轨、布设着所述第一矩形板且通过滑块定位在第一直线滑轨上的第一口字形型材架以及驱使所述第一口字形型材架竖直运动的第一电机推杆;第一口字形型材架下侧边沿固定安装有防止鸡群受伤的矩形高弹性海绵块。
9.进一步地,所述龙门式顶板升降机构包括横向跨设在底部骨架上并且两侧底部竖直安装在输送带型材支架中部上侧的龙门型材架、分别竖直布置在每个输送带型材支架两侧的带座轴承支撑架、底端通过带座轴承竖直定位在带座轴承支撑架上且嵌套着直线轴承的圆柱导柱、水平安装着所述第二矩形板且四周分别通过直线轴承连接件一一连接所述直线轴承的顶板矩形型材架以及驱使顶板矩形型材架竖直运动的第二电机推杆。
10.进一步地,所述可升降隔断后门板包括竖直布置且两侧底部分别安装在两个输送带型材支架后端上侧的h形型材支架、安装着所述第三矩形板且通过第二直线导轨可竖直移动地定位在h形型材支架上的第二口字形型材架以及驱使第二口字形型材架竖直运动的第三电机推杆。
11.进一步地,所述侧向限位机构包括竖直固定在每个输送带型材支架上侧的两个第二型材立柱以及竖直安装两个第二型材立柱上的第三矩形板。
12.所述可升降隔断后门板机构还包括:固定在第三矩形板靠近出口处的光电传感器、固定在第三矩形板靠近出口处且与光电传感器对应位置的光电传感器反光板。
13.该装置还配设有控制器,该控制器与传感器以及各动力部件电导通,以控制工作次序和工作行程。
14.本发明的有益效果:
15.本发明为轻量化人工抓鸡辅助装置,造价成本低,重量轻巧,结构简单;本发明建立了一个鸡群易于接受并进入的暗室,待到鸡群进入输送带腔室后,隔断前门板降下,将鸡群关入输送带腔室暗室,同时顶板压下;顶板由控制系统控制,带有缓冲减速控制,可柔性压缩鸡群活动空间,将鸡群压低至蹲伏状态;鸡的蹲伏状态即鸡睡觉、下蛋时的身体姿态,该姿态安静不易动故能显著降低鸡的外观损伤率;随后隔断后门板抬起,工作人员将出口处的鸡抓入装笼;当出口处的光电传感器无法感受到鸡群时,输送带步进一段距离直至传感器再次检测到输送带腔室内后续鸡群为止。该方式有效减缓了工作人员的工作强度和成本,相较于其它抓鸡设备,结构轻巧,降低了鸡群受惊扰的概率,减少了鸡的外观损伤(如淤血,断翅等);抓鸡装笼的效率节奏与固定化流水线不同完全取决于工作人员的效率节奏,固易上手;该装置只要鸡群进入输送带腔室内即可捕捉成功入笼,捕捉难度较小,效率较高。
附图说明
16.图1为本发明的立体结构示意图之一。
17.图2为本发明的立体结构示意图之二。
18.图3为本发明中可升降隔断前门板机构的立体结构示意图(图中省略部分部件)。
19.图4为本发明中龙门式顶板升降机构的立体结构示意图(图中省略部分部件)。
20.图5为本发明中可升降隔断后门板的立体结构示意图(图中省略部分部件)。
21.图6为本发明的立体结构示意图之三(为凸显光电传感器位置,隐藏出口第三矩形板)。
22.图7是本发明中前脚轮机构的立体放大结构示意图。
23.图8是本发明中后脚轮机构的立体放大结构示意图。
24.附图标记:
25.01—底部输送机构、0101—倾斜踏板、0102—长度可调可收回地脚、0103—输送带型材支架、0104—前脚轮机构、0105—后角轮机构、0106—第一角度调节器、0106.1—铰接轴、0106.2—第一手动螺栓、0107—第一脚轮连接横梁、0107.1—短柱、0108—后脚轮机构、0109—伸缩杆、0110—第二角度调节器、0110.1—铰接销轴、0110.2—第二手动螺栓、0111—小型千斤顶、0112—第二脚轮连接横梁、0113—输送带、0114—电机、0115—第三脚轮连接横梁、02—可升降隔断前门板机构、0201—第一型材立柱、0202—第一直线导轨、0203—矩形高弹性海绵、0204—第一口字形型材架、0205—第一矩形板、0206—第一电机推杆连接件、0207—第一电机推杆、03—龙门式顶板升降机构、0301—带座轴承支撑架、0302—带座轴承、0303—圆柱导柱、0304—直线轴承、0305—直线轴承连接件、0306—第二矩形板、0307—顶板矩形型材架、0308—龙门型材架、0309—第二电机推杆、0310—第二电机推杆连接件、04—可升降隔断后门板机构、0401—第三电机推杆连接件、0402—第三矩形板、0403—第三电机推杆、0404—第二口字形型材架、0405—第二直线导轨、0406—h形型材支架、05—侧向限位机构、0501—光电传感器、0502—第四矩形板、0503—光电传感器反光板、0504—第二型材立柱。
26.下面结合附图对本发明作进一步描述。
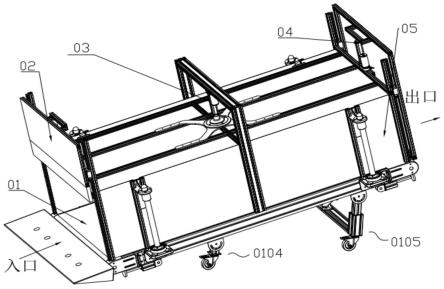
27.本发明提供的散养禽类的捕捉装置,包括底部输送机构01、可升降隔断前门板机构02、龙门式顶板升降机构03、可升降隔断后门板机构04、侧向限位机构05。上述机构中的用作底层支架支撑,其余机构相互支撑且固定在底层支架上方。
28.所述底部输送机构设置在整套捕捉装置的底侧(图1中显示位于机架的下方),用作底层支撑支架。所述可升降隔断前门板机构设置在底部输送机构前上方(图1中显示在整套装置的左侧)。所述龙门式顶板升降机构设置在底部输送机构的上方(图1中显示在整套装置的中部)。所述可升降隔断后门板机构设置在底部输送机构后侧上方(图1中显示在整套装置的右侧)。所述侧向限位机构设置在底部输送机构左右两侧(图1中显示在整套装置的前后两侧)。所有机构合围成一封闭空间,作为收捕鸡群的腔室。
29.参见图2;所述底部输送机构包括底部骨架、倾斜踏板0101、长度可调可收回地脚0102、前脚轮机构0104、脚轮型材支架0105、第一角度调节器0106、第一脚轮连接横梁0107、后脚轮机构0108、伸缩杆0109、第二角度调节器0110、小型千斤顶0111、第二脚轮连接横梁0112、输送带0113、电机0114。其中:底部骨架由相互平行布置的两个输送带型材支架0103以及连接在两个输送带型材支架之间的连接部件(优选支撑平板)组成;底部骨架的前后两端(图2中是左右两侧)分别安装一可转动的传动辊(每个传动辊的两端分别通过轴承定位在两个输送带型材支架端部;图中省略),输送带套设在两个传动辊之间;所述电机安装在输送带型材支架的一端,可通过联轴器驱动传动辊,为传动输送带提供动力。所述倾斜踏板布置在输送带前方(图2中是左侧),其作用为弥补输送带的厚度带来的高度误差,便于鸡群进入输送带上方的腔室。输送带型材支架单侧前后固定有两个长度可调可收回地脚(可外购的常规部件),可调节高度及收放。所述前脚轮机构布置在输送带型材支架中部下侧,包括固定在输送带型材支架下侧的第一角度调节器0106(可外购的常规部件)以及通过第一脚轮连接横梁连接角度调节器的万向轮;由图7可知:两个第一角度调节器0106分别固定在两侧的输送带型材支架中部下侧,第一脚轮连接横梁的两端分别通过一铰接轴0106.1与两个第一角度调节器铰接;第一脚轮连接横梁的两端下侧还分别固定一短柱0107.1,短柱的
底端固定一万向轮;此外,第一手动螺杆0106.2穿插在第一角度调节器的弧形槽(弧形槽边制作有显示角度的刻度)中并且可与第一脚轮连接横梁拧紧配合;在第一手动螺杆未拧紧时,通过转动短柱调节该手动螺杆在弧形槽中的位置,然后拧紧第一手动螺杆,即可确定短柱与输送带型材支架的倾斜角度。
30.所述后脚轮机构布置在输送带型材支架后侧(图2中是右侧)下方,包括分别固定在输送带型材支架上的第二角度调节器0110(可外购的常规部件)、两端分别通过铰接销轴0110.1与两个第二角度调节器铰接的第二脚轮连接横梁0112、两端分别通过一伸缩杆0109连接在第二脚轮连接横梁0112下侧的第三脚轮连接横梁0113、安装在第二脚轮连接横梁与第三脚轮连接横梁之间的小型千斤顶0111以及分别固定在第三脚轮连接横梁两端下侧的两个万向轮。所述伸缩杆的支座上配设有固定其伸缩内杆的螺钉(图中省略),以便根据需要确定伸缩杆的伸出长度。通过调节小型千斤顶,可调节整个输送带的倾斜程度,以适合鸡群进入腔室的需要。另外,通过第二手动螺杆0110.2调节伸缩杆在第二角度调节器弧形槽上的固定位置(调节方式与前述的短柱相同),即可确定伸缩杆与输送带型材支架的倾斜角度。
31.参见图3;所述可升降隔断前门板机构包括第一型材立柱0201、第一直线导轨0202、矩形高弹性海绵0203、第一口字形型材架0204、第一矩形板0205、第一电机推杆连接件0206、第一电机推杆0207。其中:两个第一型材立柱对称安装在两个输送带型材支架前侧上方,且垂直于输送带型材支架表面,作用在于为升降隔断前门板机构其余部件提供支撑;所述直线导轨安装在第一型材立柱的侧边并且面向装置整体的入口方向;所述第一口字形型材架与直线导轨滑块相连,能沿直线导轨上下移动;所述第一矩形板布置在第一口字形型材架的表面,其作用在于阻挡鸡群;所述矩形高弹性海绵沿着第一口字形型材架的下侧边沿布置,其作用在于挡板快速落下时不会损伤鸡群。所述第一口字形型材架沿直线导轨滑动的驱动力由第一电机推杆提供,所述第一电机推杆通过第一电机推杆连接件与第一口字形型材架的上横梁相连,第一电机的底座端与顶板矩形型材架相连。
32.参见图4;所述龙门式顶板升降机构包括带座轴承支撑架0301、带座轴承0302、圆柱导柱0303、直线轴承0304、直线轴承连接件0305、第二矩形板0306、顶板矩形型材架0307、龙门型材架0308、第二电机推杆0309、第二电机推杆连接件0310。其中:所述带座轴承支撑架二二对称分布在输送带型材支架的两侧(每个输送带型材支架的两侧分别竖直布置一带座轴承支撑架);所述带座轴承安装在带座轴承支撑架上;所述圆柱导柱竖直布置且底端固定在带座轴承内,每个圆柱导柱上可滑动地嵌套一直线轴承;所述直线轴承连接件二二对称分布在顶板矩形型材架的四个角落;所述第二矩形板水平安装在顶板矩形型材架的表面;所述直线轴承与直线轴承连接件相连,其作用在于使得顶板矩形型材架能够在保持水平状态同时,沿着导轨圆柱方向上下移动,进行定向运动;所述龙门型材架横向跨越底部骨架并且两侧竖直安装在输送带型材支架的中部上侧;所述第二电机推杆的底端安装在龙门型材架横梁下方,该推杆顶端通过第二电机推杆连接件与顶板矩形型材架的中部相连;作用在于为调节顶板矩形型材架的上下高度提供驱动力。
33.参见图5;所述可升降隔断后门板机构包括第三电机推杆连接件0401、第三矩形板0402、第三电机推杆0403、第二口字形型材架0404、第二直线导轨0405、h形型材支架0406。其中:所述h形型材支架安装在两侧的输送带型材支架后端上侧,且垂直于输送带型材支架
表面,作用在于为升降隔断后门板机构其余部件提供支撑;所述第二直线导轨安装在h形型材支架的侧边并且面向装置的出口方向;所述第二口字形型材架与所述第二直线导轨中的滑块相连,能沿直线导轨上下移动;所述第三矩形板布置在第二口字形型材架的表面,其作用在于阻挡鸡群;所述第三电机推杆的推杆端通过第三电机推杆连接件与第二口字形型材架的上横梁相连,所述第三电机推杆的底端与h形型材支架横梁相连,从而为第二口字形型材架的上下运动提供动力。
34.参见图6;所述侧向限位机构包括第三矩形板0502、第二型材立柱0504。其中:每个输送带型材支架的上侧竖直固定着两个第二型材立柱(由图可知:两个第二型材立柱又分别设置在输送带型材支架的左右两边);所述第三矩形板竖直安装两个第二型材立柱上,从而将该捕捉装置的侧面完全封闭。
35.所述可升降隔断后门板机构还包括:光电传感器0501、光电传感器反光板0503;所述光电传感器固定在第三矩形板靠近出口处,所述光电传感器反光板固定在第三矩形板靠近出口处,与光电传感器相对。
36.本发明中,各机构及组件的工作位置信号分别由若干个传感器(包括重力传感器、光电传感器)输至控制器(优选单片机;图中省略),再由控制器对各机构及组件的工作次序与动作行程分别进行控制;这些均为常规控制技术,本文不再一一细述。
37.本发明的运行过程,包括如下步骤:
38.步骤一、坐在装置后方的操作人员按下启动开关,底部输送机构、可升降隔断前门板机构、龙门式顶板升降机构、可升降隔断后门板机构、侧向限位机构恢复至起始位置,位置参见图1,鸡笼放置在操作人员周围以装笼方便为准;
39.步骤二、操作人员驱赶鸡群至输送带腔室内(鸡群重量由输送带下方的支撑平板支撑,输送带能够保持平整),此时输送带未启动,腔室内光线较暗,鸡群易于接受且易进入,降低了操作人员的驱赶难度;
40.步骤三、操作人员按下开始按钮,前门板及龙门式顶板同时落下,由于第一电机推杆的底部固定在龙门式顶板上,因此前门板的下降速度为电机推杆伸出速度的两倍,大幅度降低了留给鸡群的反应时间,同时前门板下方的高弹性海绵在一定程度上规避了鸡头被压入前门板下方的风险,顶板由控制系统控制,带有缓冲减速控制,鸡群被柔性压缩上方的活动空间,同时鸡群感受到上方顶板压下,不自觉蜷缩腿部,保持一个易静不易动的蹲伏状态,减少了损伤风险。
41.步骤四、后门板上升,露出出口通道,操作人员将蹲伏状态的鸡抓入笼内,当离出口最近的鸡全被抓入笼内后,出口处的光电传感器没有信号,输送带开始动作,直到后边移动过来的鸡再次触发光电传感器信号后停止,操作人员重复抓捕操作,抓捕节奏感针对操作人员较为友好,操作人员可自己掌握抓捕节奏;
42.步骤五、当输送带内的全部的鸡都被抓入笼内后,操作人员按下复位按钮,前门板提升及龙门式顶板同时上升,后门板下降,再次形成输送带腔室;一轮抓捕完成。
43.重复上述步骤,即可进行新一轮抓捕作业。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。