1.本发明属于履带车避障方法技术领域,具体为一种煤矿井下履带车避障方法。
背景技术:
2.随着经济的持续发展和科学技术的进步,人类的各种需求日益增长,煤矿井辅助运输的工作环境较为恶劣,属于高危环境,对于如何减少财产损失及人员伤亡率,降低运输成本,提高采矿工作效率,是急需解决的问题。
3.煤矿井是一种人工开采的地下建筑结构,以网状狭长巷道为体,主要包括主副井、通风井、大巷、皮带运输巷、采煤工作面等具有不同结构、路面和环境特征的结构单元,并且井下巷道结构复杂、狭窄多弯,存在不同的路面环境,例如阶梯结构、井下积水和泥泞路面等,以及巷道内设备、物料等堆放物。因此履带车在煤矿井下行驶需要设计合理的避障方法,保障履带车行驶的安全。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供一种煤矿井下履带车避障方法,解决了背景技术中提到的问题。
5.为了解决上述问题,本发明提供了一种技术方案:
6.一种煤矿井下履带车避障方法,包括以下步骤:
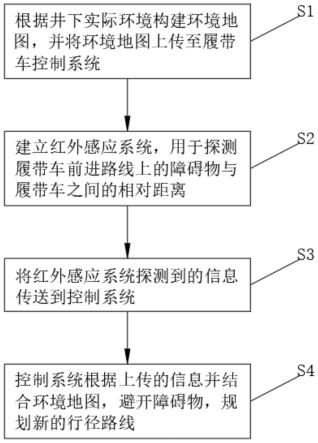
7.s1、根据井下实际环境构建环境地图,并将环境地图上传至履带车控制系统;
8.s2、建立红外感应系统,用于探测履带车前进路线上的障碍物与履带车之间的相对距离;
9.s3、将红外感应系统探测到的信息传送到控制系统;
10.s4、控制系统根据上传的信息并结合环境地图,避开障碍物,规划新的行径路线。
11.作为优选,所述步骤s1中构建环境地图,并将环境地图上传至履带车控制系统的具体操作步骤为:
12.s11、通过立体视觉相机和红外传感器采集井下具体环境,构建井下环境地图;
13.s12、根据井下各种巷道的结构条件以及巷道内设备、物料等堆放物以及自然形成的各种地质结构,对环境地图进行标注划分;
14.s13、将划分后的地图上传至履带车内部控制系统,并将履带车的定位标记在环境地图中。
15.作为优选,所述步骤s12中对环境地图进行标注划分的具体操作步骤为:
16.s121、将井下环境地图划分成若干个小地图,用a1-an、b1-bn、c1-cn、d1-dn对地图进行标准;
17.s122、其中a1-an表示每个小地图中地形的水平高度;
18.s123、其中b1-bn表示不同小地图起伏度信息,用于描述该小地图内部及其与相邻小地图之间高度变化的平均幅度信息;
19.s124、其中c1-cn表示该小地图属于哪种特定的地形特征,如可通过地形、阶梯、铁轨、泥泞、积水、未知等等;
20.s125、其中d1-dn表示可通过性代价,是通过起伏度、地形特征等数据计算参考的数据。
21.作为优选,所述步骤s1中将地图中比如积水较深区域、地势起伏较大的坡面等按照颜色由深至浅标记表示其危险性有大至小。
22.作为优选,所述步骤s2中建立红外感应系统的具体操作步骤为:
23.s21、在履带车上建立红外感应系统,包括视觉相机、红外传感器、雷达探测器等,并在履带车四周添加误碰警报装置;
24.s22、利用视觉相机对履带车前进路线环境进行探照,辅助红外传感器和雷达探测器适用于光线较差或者黑暗路径;
25.s23、利用红外感应系统探测履带车行径路线上的障碍物与履带车之间的相对距离。
26.作为优选,所述步骤s3中履带车控制系统包括定位模块、图像处理模块、信息处理模块、电源控制模块、信息收发模块。
27.作为优选,所述步骤s4中控制系统根据上传的信息并结合环境地图,避开障碍物,规划新的行径路线的具体操作步骤为:
28.s41、建立环境地图坐标系,标记履带车在环境地图中的坐标;
29.s42、控制系统接收到红外传感系统上传的信息,根据履带车自身坐标以及探测到的障碍物和履带车的相对距离,再结合环境地图坐标系,计算障碍物坐标并标记到环境地图坐标系;
30.s43、根据障碍物在环境地图坐标系的上的标记,以及环境地图,重新规划绕开障碍物的行径路线。
31.本发明的有益效果是:本发明通过构建井下环境地图,再根据井下各种巷道的结构条件以及巷道内设备、物料等堆放物以及自然形成的各种地质结构,对环境地图进行标注划分,将井下环境地图划分成若干个小地图;建立红外感应系统,探测履带车前进路线上的障碍物与履带车之间的相对距离,将红外感应系统探测到的信息传送到控制系统,控制系统根据上传的信息并结合环境地图,有利于快速避开障碍物,规划新的行径路线,有利于履带车在行驶过程中对井下不同的地形进行区分,可以及时发现行径路上的障碍物,并合理规避该障碍物继续前进,有效的提高了履带车井下作业的安全性。
附图说明:
32.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
33.图1是本发明一种煤矿井下履带车避障方法流程示意图;
34.图2是本发明图1构建环境地图,并将环境地图上传至履带车控制系统的具体操作流程示意图;
35.图3是本发明图1中对环境地图进行标注划分的具体操作流程示意图;
36.图4是本发明图1中建立红外感应系统的具体操作流程示意图。
具体实施方式:
37.如图1-4所示,本具体实施方式采用以下技术方案:
38.实施例:
39.一种煤矿井下履带车避障方法,包括以下步骤:
40.s1、根据井下实际环境构建环境地图,构建井下环境地图,将障碍物与可行径路线进行划分,并将环境地图上传至履带车控制系统,便于履带车在井下行驶路线中避开已知的位置固定的障碍物;
41.s2、建立红外感应系统,由于井下环境的复杂,巷道内的设备和堆放根据使用需求发生变化,因此不能仅根据已知地图进行导航,有必要建立红外感应系统,用于履带车井下行驶对外界环境探照,探测履带车前进路线上的障碍物与履带车之间的相对距离;
42.s3、将红外感应系统探测到的信息传送到控制系统,便于履带车及时作出反应;
43.s4、控制系统根据上传的信息并结合环境地图,有利于快速避开障碍物,规划新的行径路线。
44.其中,所述步骤s1中构建环境地图,并将环境地图上传至履带车控制系统的具体操作步骤为:
45.s11、通过立体视觉相机和红外传感器采集井下具体环境,构建井下环境地图;
46.s12、根据井下各种巷道的结构条件以及巷道内设备、物料等堆放物以及自然形成的各种地质结构,对环境地图进行标注划分;
47.s13、将划分后的地图上传至履带车内部控制系统,并将履带车的定位标记在环境地图中。
48.其中,所述步骤s12中对环境地图进行标注划分的具体操作步骤为:
49.s121、将井下环境地图划分成若干个小地图,用a1-an、b1-bn、c1-cn、d1-dn对地图进行标准;
50.s122、其中a1-an表示每个小地图中地形的水平高度;
51.s123、其中b1-bn表示不同小地图起伏度信息,用于描述该小地图内部及其与相邻小地图之间高度变化的平均幅度信息;
52.s124、其中c1-cn表示该小地图属于哪种特定的地形特征,如可通过地形、阶梯、铁轨、泥泞、积水、未知等等;
53.s125、其中d1-dn表示可通过性代价,是通过起伏度、地形特征等数据计算参考的数据。
54.其中,所述步骤s1中将地图中比如积水较深区域、地势起伏较大的坡面等按照颜色由深至浅标记表示其危险性有大至小。
55.其中,所述步骤s2中建立红外感应系统的具体操作步骤为:
56.s21、在履带车上建立红外感应系统,包括视觉相机、红外传感器、雷达探测器等,并在履带车四周添加误碰警报装置;
57.s22、利用视觉相机对履带车前进路线环境进行探照,辅助红外传感器和雷达探测器适用于光线较差或者黑暗路径;
58.s23、利用红外感应系统探测履带车行径路线上的障碍物与履带车之间的相对距离。
59.其中,所述步骤s3中履带车控制系统包括定位模块、图像处理模块、信息处理模块、电源控制模块、信息收发模块。
60.其中,所述步骤s4中控制系统根据上传的信息并结合环境地图,避开障碍物,规划新的行径路线的具体操作步骤为:
61.s41、建立环境地图坐标系,标记履带车在环境地图中的坐标;
62.s42、控制系统接收到红外传感系统上传的信息,根据履带车自身坐标以及探测到的障碍物和履带车的相对距离,再结合环境地图坐标系,计算障碍物坐标并标记到环境地图坐标系;
63.s43、根据障碍物在环境地图坐标系的上的标记,以及环境地图,重新规划绕开障碍物的行径路线。
64.具体的:在实际的应用中,首先通过立体视觉相机和红外传感器采集井下具体环境,构建井下环境地图。再根据井下各种巷道的结构条件以及巷道内设备、物料等堆放物以及自然形成的各种地质结构,对环境地图进行标注划分,将井下环境地图划分成若干个小地图,用a1-an、b1-bn、c1-cn、d1-dn对地图进行标准,其中a1-an表示每个小地图中地形的水平高度;其中b1-bn表示不同小地图起伏度信息,用于描述该小地图内部及其与相邻小地图之间高度变化的平均幅度信息;其中c1-cn表示该小地图属于哪种特定的地形特征,如可通过地形、阶梯、铁轨、泥泞、积水、未知等;其中d1-dn表示可通过性代价,是通过起伏度、地形特征等数据计算参考的数据。还要将地图中比如积水较深区域、地势起伏较大的坡面等按照颜色由深至浅标记表示其危险性有大至小。将划分后的地图上传至履带车内部控制系统,并将履带车的定位标记在环境地图中。根据井下实际环境构建环境地图,构建井下环境地图,将障碍物与可行径路线进行划分,并将环境地图上传至履带车控制系统,便于履带车在井下行驶路线中避开已知的位置固定的障碍物。
65.然后在履带车上建立红外感应系统,包括视觉相机、红外传感器、雷达探测器等,并在履带车四周添加误碰警报装置;利用视觉相机对履带车前进路线环境进行探照,辅助红外传感器和雷达探测器适用于光线较差或者黑暗路径;利用红外感应系统探测履带车行径路线上的障碍物与履带车之间的相对距离。
66.最后将红外感应系统探测到的信息传送到控制系统,建立环境地图坐标系,标记履带车在环境地图中的坐标,控制系统接收到红外传感系统上传的信息,根据履带车自身坐标以及探测到的障碍物和履带车的相对距离,再结合环境地图坐标系,计算障碍物坐标并标记到环境地图坐标系,根据障碍物在环境地图坐标系的上的标记,以及环境地图,重新规划绕开障碍物的行径路线。
67.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。