技术特征:
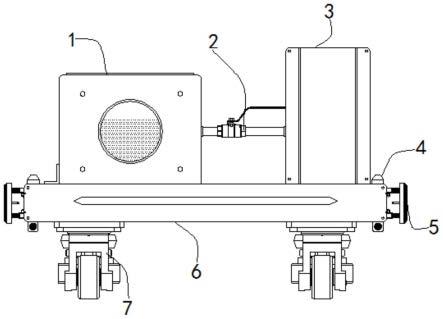
1.一种智能建造的建筑工地机器人,包括底座(6),其特征在于:所述底座(6)的下表面固定有驱动装置(7),所述底座(6)的上表面固定有水箱(1),所述水箱(1)的右侧连通有连接管(2),所述连接管(2)的右侧连通有固定在底座(6)上表面的安装箱(3),所述底座(6)的左右两侧设有用于防止施工人员被撞伤的防撞机构(5),所述底座(6)的上表面设有警示施工人员建筑工地机器人被撞击的报警机构(4);所述报警机构(4)包括固定在底座(6)上表面的两个警示灯(401),所述底座(6)的下表面固定有两个警示器(407),所述底座(6)的左右两侧均插接有两个卡板(403),所述卡板(403)远离底座(6)的一侧固定有连接板(404),所述连接板(404)的内部螺纹连接有第一螺钉(409),所述连接板(404)远离底座(6)的一侧固定有红外线感应器(405);所述连接板(404)远离底座(6)的一侧设有用于保护红外线感应器(405)的防护组件。2.根据权利要求1所述的一种智能建造的建筑工地机器人,其特征在于:所述防护组件包括固定在连接板(404)远离底座(6)一侧的固定箱(406),所述固定箱(406)内腔的正壁固定有第一橡胶垫(415),所述固定箱(406)的正面固定有连接块(416),所述连接块(416)的内部螺纹连接有第二螺钉(417),所述第二螺钉(417)的外侧螺纹连接有位于连接块(416)内部的防护罩(402),所述固定箱(406)的内部螺纹连接有螺杆(410),所述螺杆(410)的背面固定有把手(408),所述螺杆(410)的正面转动连接有位于固定箱(406)内部的限位板(412),所述限位板(412)远离防护罩(402)的一侧固定有滑动连接在固定箱(406)内部的滑块(413),所述红外线感应器(405)的背面固定有插接在限位板(412)内部的第一限位块(411),所述红外线感应器(405)远离防护罩(402)的一侧固定有插接在固定箱(406)内部的定位块(414)。3.根据权利要求1所述的一种智能建造的建筑工地机器人,其特征在于:所述报警机构(4)以底座(6)的中轴线为对称线左右互相对称,所述底座(6)的左右两侧均开设有两个连接槽,所述卡板(403)插接在连接槽内。4.根据权利要求1所述的一种智能建造的建筑工地机器人,其特征在于:所述连接板(404)远离底座(6)的一侧开设有两个第一螺纹孔,所述底座(6)的左右两侧均开设有两个第一螺纹槽,所述第一螺钉(409)螺纹连接在第一螺纹孔和第一螺纹槽内。5.根据权利要求2所述的一种智能建造的建筑工地机器人,其特征在于:所述固定箱(406)的背面开设有第二螺纹孔,所述螺杆(410)远离把手(408)的一端贯穿第二螺纹孔并螺纹连接在第二螺纹孔内,所述连接块(416)的正面开设有供以第二螺钉(417)贯穿的第三螺纹孔,且通过第三螺纹孔与第二螺钉(417)螺纹连接,所述防护罩(402)的正面开设有第二螺纹槽,所述第二螺钉(417)螺纹连接在第二螺纹槽内。6.根据权利要求2所述的一种智能建造的建筑工地机器人,其特征在于:所述固定箱(406)的内部开设有滑槽,所述滑块(413)通过滑槽与固定箱(406)间隙配合。7.根据权利要求2所述的一种智能建造的建筑工地机器人,其特征在于:所述限位板(412)的正面开设有第一限位槽,所述第一限位块(411)插接在第一限位槽内,所述定位块(414)的内部开设有定位槽,所述定位块(414)插接在定位槽内。8.根据权利要求1所述的一种智能建造的建筑工地机器人,其特征在于:所述防撞机构(5)包括分别固定在底座(6)左右两侧的固定仓(506),所述固定仓(506)的内部滑动连接有第二限位块(504),所述第二限位块(504)远离底座(6)的一侧固定有两个缓冲杆(503),所
述缓冲杆(503)远离第二限位块(504)的一端固定有防撞板(508),所述防撞板(508)远离缓冲杆(503)的一侧固定有橡胶板(501),所述防撞板(508)远离橡胶板(501)的一侧固定有分别位于两个缓冲杆(503)外侧的两个弹簧(507),所述防撞板(508)远离橡胶板(501)的一侧固定有位于两个弹簧(507)之间的挡板(502),所述挡板(502)远离防撞板(508)的一侧固定有第二橡胶垫(505)。9.根据权利要求8所述的一种智能建造的建筑工地机器人,其特征在于:所述防撞机构(5)以底座(6)的中轴线为对称线左右互相对称,所述弹簧(507)远离防撞板(508)的一侧固定在固定仓(506)靠近防撞板(508)的一侧。10.根据权利要求8所述的一种智能建造的建筑工地机器人,其特征在于:所述固定仓(506)的内部开设有第二限位槽,所述第二限位块(504)滑动连接在第二限位槽内,所述缓冲杆(503)远离防撞板(508)的一端贯穿并延伸至固定仓(506)内。
技术总结
本发明涉及一种智能建造的建筑工地机器人包括底座,所述底座的下表面固定有驱动装置,所述底座的上表面固定有水箱,所述水箱的右侧连通有连接管,所述连接管的右侧连通有固定在底座上表面的安装箱,所述底座的左右两侧设有用于防止施工人员被撞伤的防撞机构,所述底座的上表面设有警示施工人员建筑工地机器人被撞击的报警机构。该智能建造的建筑工地机器人,在报警机构的作用下通过挡板和红外线感应器时警示灯和警示器发出警示信号以提醒驾驶人员和施工人员建筑工地机器人受到撞击,避免了驾驶人员因未及时发现撞击到建筑工地机器人继续前进导致建筑工地机器人受损更严重,降低了建筑工地机器人损坏的可能。降低了建筑工地机器人损坏的可能。降低了建筑工地机器人损坏的可能。
技术研发人员:王杰 江爱军
受保护的技术使用者:重庆交通职业学院
技术研发日:2022.08.17
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。