技术特征:
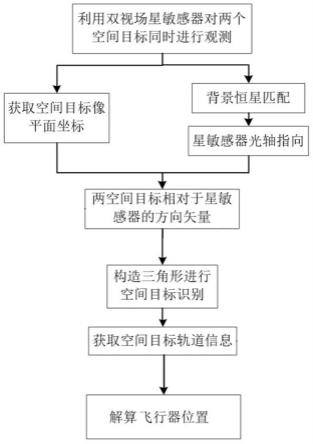
1.一种基于已知空间目标双方向矢量观测的自主导航方法,其特征在于,具体步骤如下:步骤s1:利用双视场星敏感器对两个不同方向的已编目空间目标进行观测,根据观测图像分别获取两个空间目标在星敏感器像平面的坐标;步骤s2:利用观测图像中的背景恒星与恒星星表进行匹配,分别获得星敏感器两个视场的光轴在惯性空间中的指向;步骤s3:根据空间目标的像平面坐标和星敏感器光轴指向,分别计算两个空间目标相对于星敏感器的方向矢量;步骤s4:根据两个空间目标的方向矢量以及星敏感器的预估位置,在已知空间目标编目数据库中对两个空间目标进行识别,获得两个空间目标的轨道位置信息;步骤s5:根据两个空间目标的轨道位置信息及其相对于星敏感器的方向矢量,解算出星敏感器的位置。2.根据权利要求1所述的基于已知空间目标双方向矢量观测的自主导航方法,其特征在于,所述步骤s3具体是:根据空间目标的像平面坐标以及星敏感器光轴在惯性空间中的指向,计算出两个空间目标的天球坐标,分别记为和,其中和为分别为两个空间目标的赤经,和分别为两个空间目标的赤纬;则两个空间目标相对于星敏感器的方向矢量和分别表示为:分别表示为:。3.根据权利要求1所述的基于已知空间目标双方向矢量观测的自主导航方法,其特征在于,所述步骤s4具体是:根据两个观测的空间目标的方向矢量以及星敏感器的预估位置构造观测三角形,在已知空间目标编目数据库中任选两个空间目标,同样与星敏感器的预估位置构成模板三角形;将观测三角形与模板三角形进行匹配,实现在已知空间目标编目数据库中对两个观测的空间目标进行识别,从而分别获得两个观测的空间目标相对于地心惯性系的位置矢量和。4.根据权利要求3所述的基于已知空间目标双方向矢量观测的自主导航方法,其特征在于,所述星敏感器的预估位置由惯性导航提供。5.根据权利要求1-4任意一项所述的基于已知空间目标双方向矢量观测的自主导航方法,其特征在于,所述步骤s5中根据下式计算星敏感器的位置矢量:
其中,和分别为两个空间目标相对于地心惯性系的位置矢量;和分别为两个空间目标到星敏感器的距离;和分别为两个空间目标相对于星敏感器的方向矢量。6.根据权利要求5所述的基于已知空间目标双方向矢量观测的自主导航方法,其特征在于,和的计算方法如下:构建两个空间目标、星敏感器以及地心之间的几何位置关系,其中:将空间目标1到星敏感器的距离记为,将空间目标2到星敏感器的距离记为,将空间目标1与空间目标2之间的距离记为,将与之间的夹角记为,将与之间的夹角记为,将与之间的夹角记为,则有:根据三角形正弦定理,得:根据三角形正弦定理,得:。7.根据权利要求1-4任意一项所述的基于已知空间目标双方向矢量观测的自主导航方法,其特征在于,所述步骤s5具体如下:建立两个空间目标方向矢量的观测方程:其中,为观测噪声;和分别为两个空间目标相对于地心惯性系的位置矢量;和分别为两个空间目标相对于星敏感器的方向矢量;根据该观测方程,利用非线性最小二乘算法解算出星敏感器的位置矢量。
技术总结
本发明提供一种基于已知空间目标双方向矢量观测的自主导航方法:利用双视场星敏感器对两个不同方向的已编目空间目标进行观测,根据观测图像分别获取两个空间目标在星敏感器像平面的坐标;利用观测图像中的背景恒星与恒星星表进行匹配,分别获得星敏感器两个视场的光轴在惯性空间中的指向;根据空间目标的像平面坐标和星敏感器光轴指向,分别计算两个空间目标相对于星敏感器的方向矢量;根据两个空间目标的方向矢量以及星敏感器的预估位置,在已知空间目标编目数据库中对两个空间目标进行识别,获得两个空间目标的轨道位置信息;根据两个空间目标的轨道位置信息及其相对于星敏感器的方向矢量,解算出星敏感器的位置;该方法能提高定位精度。法能提高定位精度。法能提高定位精度。
技术研发人员:郑伟 王奕迪 张士峰 李钊
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2022.10.17
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。