1.本技术涉及火箭回收技术领域,尤其涉及一种叶面旋转栅格舵控制系统。
背景技术:
2.栅格舵,是一种火箭飞行姿态控制装置,在火箭回收精准落区发挥了重要作用,通过它们可以控制回收时的姿态,确保火箭残骸能够落在设定的区域。火箭的栅格舵利用这样气动特性原理,通过风作用在舵面上所产生的不同大小、不同方向的推力,导引火箭残骸朝目标点飞行。其中,栅格舵的舵面大小、栅格数量和厚度等因素都将影响其气动特性。如图1所示,为现有技术中的栅格舵,栅格舵具有安装孔1和栅格舵叶片2,栅格舵叶片2为固定不动的,无法调节其角度。安装孔1内连接固定控销,栅格舵通过固定控销连接在火箭外壁,固定控销连接步进电机,目前箭体栅格舵是在步进电机的作用下,进行角度调整,由于格栅舵的总体调整角度有限,使其在调整方向时候,角度受限。
3.目前,格栅舵存在如下缺陷:
4.1、目前使用栅格舵,结构不能够精确控制转动角度,火箭回收段不能精准回收。
5.2、格栅舵的角度受限,控制角度受限。
6.3、箭体需要多个格栅舵控制,一般为4个,数量多,增加结构质量。
7.因此,目前亟需解决的技术问题是:如何精准回收火箭回收段,增加栅格舵的角度调整范围,减少结构质量。
技术实现要素:
8.本技术的目的在于提供一种叶面旋转栅格舵控制系统,增加栅格舵的角度调整范围,精准回收火箭回收段,减少结构质量。
9.为达到上述目的,本技术提供一种叶面旋转栅格舵控制系统,包括两个对称设置在火箭两侧的叶面旋转栅格舵;所述叶面旋转栅格舵包括固定边框、舵片和舵片角度调节机构;所述固定边框固定在火箭回收段的侧壁;所述舵片转动连接在所述固定边框内;所述舵片角度调节机构连接在所述固定边框上,且与所述舵片连接;所述舵片角度调节机构用于调节所述舵片在所述固定边框内的转动角度。
10.如上所述的叶面旋转栅格舵控制系统,其中,所述舵片两端通过转动轴转动连接在所述固定边框上。
11.如上所述的叶面旋转栅格舵控制系统,其中,所述舵片包括横置舵片和纵置舵片;所述舵片角度调节机构包括横置舵片角度调节机构和纵置舵片角度调节机构;所述横置舵片和所述纵置舵片交叉连接在所述固定边框内;所述横置舵片角度调节机构与所述横置舵片连接;所述纵置舵片角度调节机构与所述纵置舵片连接,所述横置舵片角度调节机构用于调整所述横置舵片的转动角度;所述纵置舵片角度调节机构用于调整所述纵置舵片的转动角度。
12.如上所述的叶面旋转栅格舵控制系统,其中,所述横置舵片的侧边缘向内开设有
第一v形开口槽,所述纵置舵片垂直于所述横置舵片,并限位在所述第一v形开口槽内;所述纵置舵片角度调节机构带动所述纵置舵片在所述第一v形开口槽内摆动。
13.如上所述的叶面旋转栅格舵控制系统,其中,所述纵置舵片的侧边缘向内开设有第二v形开口槽;所述横置舵片限位在所述第二v形开口槽内;所述横置舵片角度调节机构带动所述横置舵片在所述第二v形开口槽内摆动。
14.如上所述的叶面旋转栅格舵控制系统,其中,所述横置舵片和所述纵置舵片均包括多个,多个所述横置舵片平行间隔开设置;多个所述纵置舵片平行间隔开设置。
15.如上所述的叶面旋转栅格舵控制系统,其中,所述横置舵片的侧边缘沿其长度方向间隔开设有多个所述第一v形开口槽;所述纵置舵片的侧边缘沿其长度方向间隔开设有多个所述第二v形开口槽。
16.如上所述的叶面旋转栅格舵控制系统,其中,所述横置舵片角度调节机构包括第一舵片连接机构和第一推拉驱动机构;所述第一舵片连接机构与所述横置舵片连接;所述第一推拉驱动机构于所述第一舵片连接机构连接,用于给所述第一舵片连接机构提供推拉力,以带动所述第一舵片连接机构沿其长度方向移动;所述第一舵片连接机构带动所述横置舵片摆动。
17.如上所述的叶面旋转栅格舵控制系统,其中,所述纵置舵片角度调节机构包括第二舵片连接机构和第二推拉驱动机构;
18.所述第二舵片连接机构与所述横置舵片连接;
19.所述第二推拉驱动机构于所述第二舵片连接机构连接,用于给所述第二舵片连接机构提供推拉力,以带动所述第二舵片连接机构沿其长度方向移动;
20.所述第二舵片连接机构带动所述纵置舵片摆动。
21.如上所述的叶面旋转栅格舵控制系统,其中,所述第一舵片连接机构包括连杆和枢转连接部件;所述连杆上沿其长度方向间隔开设置有多个枢转连接部件;每一个枢转连接部件上连接有一个所述横置舵片。
22.本技术实现的有益效果如下:
23.(1)本技术格栅舵包括横置舵片和纵置舵片,横置舵片和纵置舵片交叉配合设置,横置舵片和纵置舵片精准配合转动,能够精确控制横置舵片和纵置舵片的倾斜角度,流经横置舵片4和纵置舵片5的流体可以扫过的范围为360度,实现了增加栅格舵控制角度的可调节范围,提高火箭回收段回收精度。
24.(2)本技术相对于现有技术中在火箭回收段侧壁上安装的4个栅格舵而言,减少了格栅舵数量,减少附加重量,并且节约成本。
附图说明
25.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域技术人员来讲,还可以根据这些附图获得其他的附图。
26.图1为现有技术中栅格舵的结构示意图。
27.图2为本技术实施例的一种叶面旋转栅格舵控制系统的结构示意图。
28.图3为本技术实施例的横置舵片角度调节机构的结构示意图。
29.图4为本技术实施例的第一舵片连接机构的结构示意图。
30.图5为本技术实施例的摆动块的结构示意图。
31.图6为本技术实施例的传动机构的结构示意图。
32.图7为本技术实施例的仅安装纵置舵片的结构示意图。
33.图8为本技术实施例的纵置舵片的结构示意图。
34.图9为本技术实施例的仅安装横置舵片的结构示意图。
35.图10为本技术实施例的纵置舵片摆动后示意图。
36.图11为本技术实施例的横置舵片和纵置舵片摆动后示意图。
37.图12为本技术实施例的横置舵片摆动角度范围示意图。
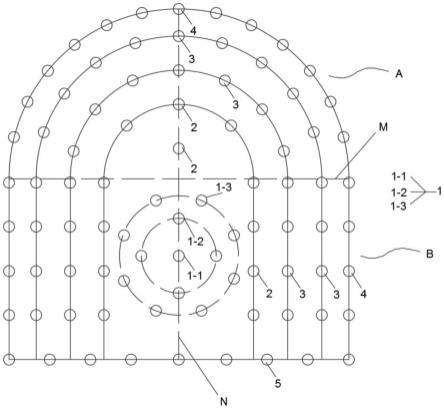
38.图13为本技术实施例的360度旋转格栅舵旋转后流体可以扫过方向示意图。
39.图14为本技术实施例的叶面旋转栅格舵控制系统安装在火箭上的结构示意图。
40.附图标记:1-安装孔;2-栅格舵叶片;3-固定边框;4-横置舵片;5-纵置舵片;6-横置舵片角度调节机构;7-纵置舵片角度调节机构;31-固定机构;32-转动轴;33-第一边框;34-第二边框;41-第一v形开口槽;51-第二v形开口槽;52-凹入槽;61-第一舵片连接机构;62-第一推拉驱动机构;71-第二舵片连接机构;72-第二推拉驱动机构;611-枢转连接部件;612-连杆;621-控制电机;622-减速机构;623-传动机构;6111-连接框;6112-摆动块;6113-连接轴;6231-齿条;6232-齿轮;6233-减速机构输出轴;6234-导向轨;61121-连接孔。
具体实施方式
41.下面结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
42.如图2所示,本技术提供一种叶面旋转栅格舵控制系统,包括两个对称设置在火箭两侧的叶面旋转栅格舵;叶面旋转栅格舵包括固定边框3、舵片和舵片角度调节机构;固定边框3通过固定机构31固定在火箭回收段的侧壁;舵片转动连接在固定边框3内;舵片角度调节机构连接在固定边框3上,且与舵片连接;舵片角度调节机构用于调节舵片在固定边框3内的转动角度。舵片两端通过转动轴32转动连接在固定边框3上。舵片包括横置舵片4和纵置舵片5;舵片角度调节机构包括横置舵片角度调节机构6和纵置舵片角度调节机构7;横置舵片4和纵置舵片5交叉连接在固定边框3内;横置舵片角度调节机构6与横置舵片4连接;纵置舵片角度调节机构7与纵置舵片5连接,横置舵片角度调节机构6用于调整横置舵片4的转动角度;纵置舵片角度调节机构7用于调整纵置舵片5的转动角度。横置舵片4和纵置舵片5精准配合转动,精准调节栅格舵的舵片角度,进而使火箭回收段回收的轨迹符合预先规划的轨迹,提高火箭回收段的回收精度。
43.作为本发明的具体实施例,固定机构31通过固定螺栓固定在火箭回收段的侧壁,在此不限制固定机构31如何固定在火箭回收段的侧壁,也可以是其他的固定方法。
44.如图2所示,固定边框3为四边形框架体;包括两个平行间隔开设置的第一边框33和两个平行间隔开设置的第二边框34,第一边框33垂直于第二边框34,第一边框33和第二
边框34之间围绕成安装横置舵片4和纵置舵片5的空间。
45.如图2所示,固定机构31固定连接在第一边框33上,固定机构31垂直固定连接在火箭回收段外壁,固定机构31用于在栅格舵与火箭回收段之间传递力,实现火箭回收段姿态控制。第二边框34垂直于火箭回收段外壁。横置舵片4的两端分别通过转动轴32转动连接在两个第二边框34上;纵置舵片5的两端分别通过转动轴32转动连接在两个第一边框33上。在舵片角度调节机构推拉时候,舵片绕着转动轴32旋转,实现舵片角度调整。
46.如图2所示,横置舵片角度调节机构6平行于第二边框34,设置在第二边框34上方,横置舵片角度调节机构6用于连接横置舵片4;纵置舵片角度调节机构7平行于第一边框33,设置在第一边框33下方,纵置舵片角度调节机构7用于连接纵置舵片5。
47.如图2和9所示,横置舵片4的侧边缘向内开设有第一v形开口槽41,纵置舵片5垂直于横置舵片4,并限位在第一v形开口槽41内;纵置舵片角度调节机构7带动纵置舵片5在第一v形开口槽41内摆动。优选的,第一v形开口槽41的开口角度为60度,从而限制纵置舵片5摆动角度范围为60度,通过纵置舵片角度调节机构7实现精确控制纵置舵片5的摆动角度。
48.如图2、7和8所示,纵置舵片5的侧边缘向内开设有第二v形开口槽51;横置舵片4限位在第二v形开口槽51内;横置舵片角度调节机构6带动横置舵片4在第二v形开口槽51内摆动。优选的,第二v形开口槽51的开口角度为60度,从而限制横置舵片4摆动角度范围为60度,通过横置舵片角度调节机构6实现精确控制横置舵片4的摆动角度。
49.如图7和9所示,第一v形开口槽41朝下开设,第二v形开口槽51朝上开设,从而实现第一v形开口槽41和第二v形开口槽51对接。
50.如图8所示,第二v形开口槽51的槽底部开设有凹入槽52,第二v形开口槽51的槽底部的凹入槽52用于卡入横置舵片4。同样的,第一v形开口槽41的槽底部也开设有凹入槽52,第一v形开口槽41的槽底部的凹入槽52用于卡入纵置舵片5。优选的,第一v形开口槽41的槽底部的凹入槽52与第二v形开口槽51的槽底部的凹入槽52对接在一起,实现横置舵片4和纵置舵片5的紧凑配合连接。
51.作为本发明的具体实施例,横置舵片4和纵置舵片5均包括多个,多个横置舵片4平行间隔开设置;多个纵置舵片5平行间隔开设置。多个纵置舵片5和多个纵置舵片5交叉设置,多个纵置舵片5和多个纵置舵片5的倾斜角度可进行调整,从而调节流经多个纵置舵片5和多个纵置舵片5的流体方向,进而改变火箭回收段的回收方向,精准控制火箭回收段回收。
52.作为本发明的具体实施例,横置舵片4的侧边缘沿其长度方向间隔开设有多个第一v形开口槽41;纵置舵片5的侧边缘沿其长度方向间隔开设有多个第二v形开口槽51,每一个第一v形开口槽41分别与一个第二v形开口槽51配合对接,更好的实现横置舵片4和纵置舵片5角度范围的限制,以及提高横置舵片4和纵置舵片5角度调节精度。
53.如图3所示,横置舵片角度调节机构6包括第一舵片连接机构61和第一推拉驱动机构62;第一舵片连接机构61与横置舵片4连接;第一推拉驱动机构62于第一舵片连接机构61连接,用于给第一舵片连接机构61提供推拉力,以带动第一舵片连接机构61沿其长度方向移动;第一舵片连接机构61带动横置舵片4摆动。
54.如图3所示,纵置舵片角度调节机构7包括第二舵片连接机构71和第二推拉驱动机构72。
55.如图2和3所示,第二舵片连接机构71与纵置舵片5连接;第二推拉驱动机构72与第二舵片连接机构71连接,用于给第二舵片连接机构71提供推拉力,以带动第二舵片连接机构71沿其长度方向移动;第二舵片连接机构71带动纵置舵片5摆动。
56.如图3所示,第一舵片连接机构61包括连杆612和枢转连接部件611;连杆612上沿其长度方向间隔开设置有多个枢转连接部件611;每一个枢转连接部件611上连接有一个横置舵片4。第一舵片连接机构61与第一推拉驱动机构62连接的一端为连杆612,从而使得第一推拉驱动机构62通过连杆612方便推拉第一舵片连接机构61。
57.作为本发明的具体实施例,第二舵片连接机构71的结构与第一舵片连接机构61的结构相同。本发明通过连杆612连接多个枢转连接部件611,每一个枢转连接部件611上分别连接有一个横置舵片4,实现了多个横置舵片4连接在一起,形成铰链,形成联动,通过第一舵片连接机构61可整体调整多个横置舵片4的摆动角度,且多个横置舵片4的摆动角度一致。
58.如图3-5所示,第一舵片连接机构61中的枢转连接部件611包括连接框6111、摆动块6112和连接轴6113;摆动块6112开设有连接孔61121;连接框6111与连杆612固定连接,连接轴6113固定连接在连接框6111上,连接轴6113穿入摆动块6112的连接孔61121,摆动块6112转动连接在连接轴6113上,且摆动块6112的底部与横置舵片4固定连接。连杆612在第一推拉驱动机构62的推拉力作用下,实现拉动或推动枢转连接部件611沿着连杆612的长度方向运动的作用,连杆612拉动(或推动)枢转连接部件611的作用力作用在连接框6111上,连杆612拉动(或推动)连接框6111运动;由于摆动块6112底部与横置舵片4固定连接,而横置舵片4转动连接在固定边框3上,因此,连接框6111运动后,带动连接轴6113移动,摆动块6112在连接轴6113的拉动作用下,摆动一定角度,进而带动横置舵片4摆动一定角度。
59.如图5所示,摆动块6112的连接孔61121为长条状,或者连接孔61121为长槽;当摆动块6112摆动时,连接轴6113可在长条状的连接孔61121内滑动,使得横置舵片4顺利摆动。
60.作为本发明的具体实施例,第二舵片连接机构71中摆动块6112的底部与纵置舵片5固定连接。
61.如图3和6所示,第一推拉驱动机构62包括控制电机621、减速机构622和传动机构623;控制电机621的输出轴与减速机构622的输入轴连接;减速机构622的输出轴与传动机构623的输入轴连接;传动机构623与连杆612连接,减速机构622用于降低控制电机621输出的转速;传动机构623用于将控制电机621的转动转变为连杆612的直线运动。
62.优选的,控制电机621为步进电机,在减速机构622的作用下,实现减速,把步进电机的扭矩转化为连接机构的推拉力,实现舵片的控制。
63.如图6所示,传动机构623为齿轮齿条机构,齿轮齿条机构精准调节连杆612的移动距离,从而精准调节舵片的摆动角度。传动机构623包括啮合连接的齿轮6232和齿条6231。齿条6231滑移连接在导向轨6234上;导向轨6234固定在固定边框3上;齿条6231固定连接连杆612。减速机构输出轴6233与齿轮6232连接;控制电机621转动带动减速机构622转动,减速机构622带动齿轮6232转动,齿轮6232带动齿条6231沿其长度方向的直线运动;齿条6231带动连杆612沿其长度方向做直线运动,连杆612带动枢转连接部件611运动。
64.作为本发明的其他实施例,第一推拉驱动机构62和第二推拉驱动机构72也可以是其他能够为连杆612提供推拉力的机构,例如,气缸驱动机构或油缸驱动机构等。在此,不限
制第一推拉驱动机构62和第二推拉驱动机构72的结构,也可以是其他能够为连杆612提供推拉力的机构。
65.如图10所示,为纵置舵片5单独摆动后的状态示意图。多个纵置舵片5摆动角度一致,流体沿着纵置舵片5的叶面流过,纵置舵片5摆动后,调节了流体经流纵置舵片5的方向,进而调节火箭回收段的回收方向。
66.如图11所示,为纵置舵片5和横置舵片4均摆动的状态示意图。通过纵置舵片5和横置舵片4两组舵片的摆动,提高了流体经过栅格舵的方向可调节范围,进而提高了火箭回收段的回收精度。
67.如图12所示,横置舵片4的摆动角度范围均为60度。作为本发明的具体实施例,横置舵片4和纵置舵片5的摆动角度范围均为60度。横置舵片4和纵置舵片5两个叶片精确配合转动,能够实现360度旋转控制。
68.如图13所示为横置舵片4和纵置舵片5两个叶片精确配合转动后,流经横置舵片4和纵置舵片5的流体可以扫过的范围为360度,实现了增加栅格舵控制角度的可调节范围,提高火箭回收段回收精度。
69.如图14所示,火箭两侧对称设置有两个叶面旋转栅格舵,固定边框3垂直于火箭回收段侧壁,火箭发射飞行和回收的过程中,均可以通过调节横置舵片4和纵置舵片5的倾斜角度,改变流经横置舵片4和纵置舵片5的气流方向,从而改变火箭的飞行方向,以实现火箭精准飞行,提高火箭回收段的回收精度。
70.本技术实现的有益效果如下:
71.(1)本技术格栅舵包括横置舵片和纵置舵片,横置舵片和纵置舵片交叉配合设置,横置舵片和纵置舵片精准配合转动,能够精确控制横置舵片和纵置舵片的倾斜角度,流经横置舵片4和纵置舵片5的流体可以扫过的范围为360度,实现了增加栅格舵控制角度的可调节范围,提高火箭回收段回收精度。
72.(2)本技术相对于现有技术中在火箭回收段侧壁上安装的4个栅格舵而言,减少了格栅舵数量,减少火箭附加重量,并且节约成本。
73.以上所述仅为本发明的实施方式而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理内所做的任何修改、等同替换、改进等,均应包括在本发明的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。