1.本实用新型属于制动梁除锈技术领域,具体涉及一种铁路车辆制动梁激光除锈装置。
背景技术:
2.铁路车辆进行段修时需要对制动梁等关键部件进行除锈作业,目前制动梁除锈主要采用抛丸设备,存在环境污染大,除锈不彻底,作业效率低,职业危害大等缺点。
3.近年来随着激光除锈技术的发展,在各个行已得到广泛应用,该技术具有无接触、无损伤、无污染,可清洗难以到达的区域等优点,是一种具有无研磨、非接触式的新型环保清洗方式,可以解决传统清洗方式无法解决的问题。
技术实现要素:
4.本实用新型为了解决现有制动梁除锈主要采用抛丸设备,存在环境污染大,除锈不彻底以及作业效率低的问题,进而提供一种铁路车辆制动梁激光除锈装置;
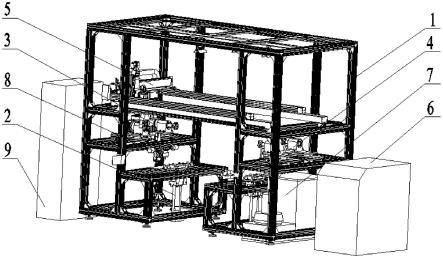
5.一种铁路车辆制动梁激光除锈装置,所述除锈装置包括主框架体、主动伸缩旋转机构、从动伸缩旋转机构、滑台模组、激光清洗机、除尘器、控制柜和两个气缸升降机构;
6.所述主框架体包括两个l型框架,l型框架相对设置,l型框架的顶部通过横梁相连,每个l型框架由上至下分为三层,且相邻两层之间通过横梁分隔;
7.所述两个气缸升降机构分别设置在一个l型框架的最下层,且两个气缸升降机构沿主框架体长度方向的中心线对称设置,每个气缸升降机构与所在的l型框架拆卸连接,主动伸缩旋转机构设置在一个l型框架的中间层,且主动伸缩旋转机构设置在位于同一个l型框架中气缸升降机构的后方,从动伸缩旋转机构设置在另一个l型框架的中间层,且从动伸缩旋转机构设置在位于同一个l型框架中气缸升降机构的后方,主动伸缩旋转机构和从动伸缩旋转机构沿主框架体长度方向的中心线对称设置,且主动伸缩旋转机构与所在的l型框架拆卸连接,从动伸缩旋转机构与所在的l型框架拆卸连接,滑台模组设置在两个l型框架的最上层,且滑台模组与两个l型框架均为拆卸连接;
8.所述激光清洗机、除尘器和控制柜均设置在主框架体的外部,激光清洗机的清洗端安装在滑台模组上,除尘器的吸尘端安装在滑台模组上,控制柜中的信号输出端通过导线分别与主动伸缩旋转机构上的信号输入端、从动伸缩旋转机构上的信号输入端、滑台模组上的信号输入端、激光清洗机上的信号输入端、除尘器上的信号输入端和两个气缸升降机构上的信号输入端相连;
9.进一步地,所述除锈装置还包括两个端部毛刷除锈机构,两个端部毛刷除锈机构分别安装一个l型框架上,一个端部毛刷除锈机构设置在主动伸缩旋转机构与位于同一个l型框架中的气缸升降机构之间,另一个端部毛刷除锈机构设置在从动伸缩旋转机构与位于同一个l型框架中的气缸升降机构之间;
10.本实用新型与现有技术相比具有以下有益效果:
11.1、本实用新型提供的一种铁路车辆制动梁激光除锈装置,利用高能量激光束作用在待清洗物表面,在快速光振动、汽化、分解和等离子体剥离等机理的共同作用下,使污物脱离基底,实现表面清洗,极大的提高了清洗除锈质量。
12.2、本实用新型提供的一种铁路车辆制动梁激光除锈装置,由于激光清洗除锈速度快,并且采用双制动梁同时清洗除锈方式,约3~4分钟完成两件制动梁的除锈作业,提高了清洗效率。
13.3、本实用新型提供的一种铁路车辆制动梁激光除锈装置,还引入了高压除尘系统,在激光清洗除锈作业过程中,利用高压除尘系统进行烟尘净化,保证作业区环境,有效防止环境污染。
14.4、本实用新型提供的一种铁路车辆制动梁激光除锈装置,设备可适用于不同车型的制动梁,通用性强,适合与推广使用。
附图说明
15.图1为本实用新型所述除锈装置的结构示意图:
16.图2为本实用新型所述除锈装置的左视示意图;
17.图3为本实用新型所述除锈装置的主视示意图(梁体端面清扫);
18.图4为本实用新型所述除锈装置的主视示意图(梁体表面清扫);
19.图5为本实用新型所述除锈装置的俯视示意图;
20.图6为本实用新型所述除锈装置中气缸升降机构的轴测示意图;
21.图7为本实用新型所述除锈装置中气缸升降机构的主视示意图;
22.图8为本实用新型所述除锈装置中气缸升降机构的俯视示意图;
23.图9为本实用新型所述除锈装置中主动伸缩旋转机构的主视示意图;
24.图10为本实用新型所述除锈装置中主动伸缩旋转机构的左视示意图;
25.图11为本实用新型所述除锈装置中主动伸缩旋转机构的俯视示意图;
26.图12为本实用新型所述除锈装置中从动伸缩旋转机构的轴测示意图;
27.图13为本实用新型所述除锈装置中从动伸缩旋转机构的主视示意图;
28.图14为本实用新型所述除锈装置中从动伸缩旋转机构的俯视示意图;
29.图15为本实用新型所述除锈装置中从动伸缩旋转机构的左视示意图;
30.图16为本实用新型所述除锈装置中滑台模组的主视示意图;
31.图17为本实用新型所述除锈装置中滑台模组的左视示意图;
32.图18为本实用新型所述除锈装置中滑台模组的俯视示意图;
33.图19为本实用新型所述除锈装置中端部毛刷除锈机构的轴测示意图;
34.图中1主框架体、2气缸升降机构、21支撑架、22升降气缸、23支撑块、24气缸安装板、25托板、26定位块、3主动伸缩旋转机构、31电机安装板、32电机、33减速机、34主动链轮、35链条、36从动链条、37一号轴承座、38一号传动轴、39一号连接座、310一号定位块、311一号滑块滑轨组件、312推动气缸、313推动气缸安装板、4从动伸缩旋转机构、41从动旋转单元安装板、42二号轴承座、43二号传动轴、44二号连接座、45二号定位块、46二号滑块滑轨组件、47从动推动气缸、48从动推动气缸安装板、5滑台模组、51横向滑台、52横向滑台驱动电机组、53纵向滑台、54纵向滑台驱动电机组、55滑台连接块、56滑台安装板、57竖向滑台、58
竖向滑台驱动电机组、59部件安装板、510激光除锈器安装支架、511激光除锈器、512吸尘罩安装支架、513吸尘罩、6激光清洗机、7除尘器、8端部毛刷除锈机构、81毛刷安装板、82毛刷驱动电机、83主动轮、84转动轴、85轴承架、86从动轮、87皮带、88毛刷和9控制柜。
具体实施方式
35.具体实施方式一:参照图1至图19说明本实施方式,本实施方式提供一种铁路车辆制动梁激光除锈装置,所述除锈装置包括主框架体1、主动伸缩旋转机构3、从动伸缩旋转机构4、滑台模组5、激光清洗机6、除尘器7、控制柜9和两个气缸升降机构2;
36.所述主框架体1包括两个l型框架,l型框架相对设置,l型框架的顶部通过横梁相连,每个l型框架由上至下分为三层,且相邻两层之间通过横梁分隔;
37.所述两个气缸升降机构2分别设置在一个l型框架的最下层,且两个气缸升降机构2沿主框架体1长度方向的中心线对称设置,每个气缸升降机构2与所在的l型框架拆卸连接,主动伸缩旋转机构3设置在一个l型框架的中间层,且主动伸缩旋转机构3设置在位于同一个l型框架中气缸升降机构2的后方,从动伸缩旋转机构4设置在另一个l型框架的中间层,且从动伸缩旋转机构4设置在位于同一个l型框架中气缸升降机构2的后方,主动伸缩旋转机构3和从动伸缩旋转机构4沿主框架体1长度方向的中心线对称设置,且主动伸缩旋转机构3与所在的l型框架拆卸连接,从动伸缩旋转机构4与所在的l型框架拆卸连接,滑台模组5设置在两个l型框架的最上层,且滑台模组5与两个l型框架均为拆卸连接;
38.所述激光清洗机6、除尘器7和控制柜9均设置在主框架体1的外部,激光清洗机6的清洗端安装在滑台模组5上,除尘器7的吸尘端安装在滑台模组5上,控制柜9中的信号输出端通过导线分别与主动伸缩旋转机构3上的信号输入端、从动伸缩旋转机构4上的信号输入端、滑台模组5上的信号输入端、激光清洗机6上的信号输入端、除尘器7上的信号输入端和两个气缸升降机构2上的信号输入端相连。
39.本实施方式中通过气缸升降机构2带动需要被清扫的制动梁体竖直上升,直至上升至主动伸缩旋转机构3与从动伸缩旋转机构4之间,在通过主动伸缩旋转机构3与从动伸缩旋转机构4配合对制动梁体进行夹持后,再沿制动梁体的轴线进行转动,同时利用位于滑台模组5上激光清洗机6的清洗端对转动的梁体进行激光清扫,进而达到除锈的目的;
40.本技术中激光清洗机6的厂家为苏州海奕激光科技有限公司,产品型号:hy-hc2000cw;
41.本技术中除尘器7的厂家为天津盛安机械设备有限公司,产品型号:sa-cyt80-yw;
42.本技术中控制柜9的厂家为哈尔滨威克轨道交通技术开发有限按公司,产品型号:veic-jgqx-05
43.具体实施方式二:参照图1至图19说明本实施方式,本实施方式是对具体实施方式一中所述的防咬部1作进一步限定,本实施方式中所述除锈装置还包括两个端部毛刷除锈机构8,两个端部毛刷除锈机构8分别安装一个l型框架上,一个端部毛刷除锈机构8设置在主动伸缩旋转机构3与位于同一个l型框架中的气缸升降机构2之间,另一个端部毛刷除锈机构8设置在从动伸缩旋转机构4与位于同一个l型框架中的气缸升降机构2之间。其它组成及连接方式与具体实施方式一相同。
44.本实施方式中增加了端部毛刷除锈机构8,考虑到激光除锈仅是对梁体周向进行
除锈处理,而端面也是制动梁的一部分,而且制动梁的端部上也会伴随着锈蚀,如果不对端部进行清扫,也容易影响梁体后期的使用,因此在主动伸缩旋转机构3与从动伸缩旋转机构4的下方设置有端部毛刷除锈机构8,可以保证在制动梁举升的过程中,利用钢丝滚刷旋转完成制动梁闸瓦托滑块端面的清洗除锈作业。
45.具体实施方式三:参照图1至图19说明本实施方式,本实施方式是对具体实施方式二所述的气缸升降机构2作进一步限定,本实施方式中所述气缸升降机构2包括支撑架21、升降气缸22、支撑块23、气缸安装板24、托板25和两个梁体定位块26;
46.所述升降气缸22的壳体沿竖直方向插装在支撑架21上,支撑块23设置在支撑架21的顶部,且支撑块23与支撑架21拆卸连接,气缸安装板24设置在支撑块23的顶部,且气缸安装板24与支撑块23拆卸连接,托板25设置在气缸安装板24的上方,且托板25的长度延伸方向与主框架体1的宽度延伸方向同向设置,升降气缸22中活塞杆的端部依次穿过支撑块23和气缸安装板24并与托板25拆卸连接,两个梁体定位块26沿托板25长度方向的中心线对称设置在托板25的上表面上,且每个梁体定位块26与托板25拆卸连接。其它组成及连接方式与具体实施方式二相同。
47.本实施方式中升降气缸22作为主要升降的动力装置,通过气缸安装板24将气缸升降机构2与所在的l型支架拆卸连接,具体是通过螺栓螺母机构实现的拆卸连接,以此来保证气缸升降机构2在工作时的稳定性,位于升降气缸22中活塞杆端的托板25作为梁体定位块26的支撑部件,梁体定位块26为v型块,通过螺栓与托板25拆卸连接。
48.具体实施方式四:参照图1至图19说明本实施方式,本实施方式是对具体实施方式三所述的主动伸缩旋转机构3作进一步限定,本实施方式中所述主动伸缩旋转机构3包括电机安装板31、电机32、减速机33、主动链轮34、链条35、从动链条36、一号滑块滑轨组件311、推动气缸312、推动气缸安装板313和两个主动旋转单元;
49.所述一号滑块滑轨组件311中包括两条一号滑轨和两个一号滑块,两条一号滑轨沿主框架体1宽度方向的中心线平行对称设置在所在l型框架的中层梁体上,且每条一号滑轨与所在l型框架的中层梁体拆卸连接,每个一号滑块对应设置在一条一号滑轨上,且每个一号滑块与所在的一号滑轨滑动连接;
50.所述电机安装板31设置在两个一号滑块上,且电机安装板31与每个一号滑块拆卸连接,两个主动旋转单元沿电机安装板31长度方向的中心线平行对称,且每个主动旋转单元与电机安装板31拆卸连接,一个主动旋转单元的末端套装有主动链轮34,另一个主动旋转单元的末端套装有从动链条36,主动链轮34和从动链条36之间通过链条35传动连接,电机32的壳体固接在电机安装板31的上表面上,减速机33设置在电机32的动力输出端,且减速机33的壳体固接在电机安装板31的上表面上,电机32的动力输出轴与减速机33的动力输入端相连,减速机33的动力输出轴插装在主动链轮34上,推动气缸312设置在两条一号滑轨之间,且推动气缸312中活塞杆的端部上安装有固定块,固定块与电机安装板31的下表面固定连接,推动气缸312中壳体的尾部设有推动气缸安装板313,推动气缸安装板313与推动气缸312的壳体固定连接,推动气缸安装板313与主动伸缩旋转机构3所在l型框架的中层梁体拆卸连接。其它组成及连接方式与具体实施方式三相同。
51.本实施方式中,主动伸缩旋转机构3是夹持制动梁体的主要部件,通过推动气缸312中活塞杆的伸缩带动电机安装板31在一号滑块滑轨组件311上进行滑动,电机32工作将
动力传递给减速机33,减速机33带动主动链轮34转动,主动链轮34通过链条35带动从动链条36进行同步转动,主动链轮34与从动链条36同时驱动对应的主动旋转单元进行转动。
52.具体实施方式五:参照图1至图19说明本实施方式,本实施方式是对具体实施方式四所述的主动旋转单元作进一步限定,本实施方式中所述主动旋转单元包括一号轴承座37、一号传动轴38、一号连接座39和一号定位块310,所述一号轴承座37设置在电机安装板31的上表面上,且一号轴承座37与电机安装板31拆卸连接,一号轴承座37中设有一号轴承,一号轴承的轴承外圈与一号轴承座37固定连接,一号传动轴38插设在一号轴承中,且一号传动轴38与一号轴承的轴承内圈固定连接,一号传动轴38的两端均延伸至一号轴承座37的外部,一号传动轴38靠近电机32的一端上套装有一个主动链轮34或一个从动链条36,一号传动轴38的另一端端面上安装有一号连接座39,一号连接座39上安装有一号定位块310。其它组成及连接方式与具体实施方式四相同。
53.本实施方式中,主动旋转单元是主动伸缩旋转机构3中主要的夹持部件,其中一号定位块310的与所要夹持的梁体端部配合设置,通过主动链轮34或从动链条36带动一号传动轴38转动,进而带动通过一号定位块310夹持后的制动梁体进行转动。
54.具体实施方式六:参照图1至图19说明本实施方式,本实施方式是对具体实施方式五所述的从动伸缩旋转机构4作进一步限定,本实施方式中所述从动伸缩旋转机构4包括从动旋转单元安装板41、二号滑块滑轨组件46、从动推动气缸47、从动推动气缸安装板48和两个从动旋转单元;
55.所述二号滑块滑轨组件46中包括两条二号滑轨和两个二号滑块,两条二号滑轨沿主框架体1宽度方向的中心线平行对称设置在所在l型框架的中层梁体上,且每条二号滑轨与所在l型框架的中层梁体拆卸连接,每个二号滑块对应设置在一条二号滑轨上,且每个二号滑块与所在的二号滑轨滑动连接;
56.所述从动旋转单元安装板41设置在两个二号滑块上,且从动旋转单元安装板41与每个二号滑块拆卸连接,两个从动旋转单元沿从动旋转单元安装板41长度方向的中心线平行对称,且每个从动旋转单元与从动旋转单元安装板41拆卸连接,从动推动气缸47设置在两条二号滑轨之间,且从动推动气缸47中活塞杆的端部上安装有固定块,固定块与从动旋转单元安装板41的下表面固定连接,从动推动气缸47中壳体的尾部设有从动推动气缸安装板48,从动推动气缸安装板48与从动推动气缸47的壳体固定连接,从动推动气缸安装板48与从动伸缩旋转机构4所在l型框架的中层梁体拆卸连接。其它组成及连接方式与具体实施方式五相同。
57.本实施方式中从动伸缩旋转机构4的结构与主动伸缩旋转机构3的结构相近,区别在于从动伸缩旋转机构4尽可以进行横向的伸缩运动,对于从动旋转单元并无驱动装置,而从动旋转单元与主动旋转单元同轴对应设置,从动旋转单元用对制动梁体的另一端进行夹紧,同时在主动旋转单元进行转动时,从动旋转单元作为从动部件配合主动旋转单元带动制动梁体转动。
58.具体实施方式七:参照图1至图19说明本实施方式,本实施方式是对具体实施方式六所述的从动旋转单元作进一步限定,本实施方式中所述从动旋转单元包括二号轴承座42、二号传动轴43、二号连接座44和二号定位块45,所述二号轴承座42设置在从动旋转单元安装板41的上表面上,且二号轴承座42与从动旋转单元安装板41拆卸连接,二号轴承座42
中设有二号轴承,二号轴承的轴承外圈与二号轴承座42固定连接,二号传动轴43插设在二号轴承中,且二号传动轴43与二号轴承的轴承内圈固定连接,二号传动轴43靠近电机32的一端隐藏在二号轴承座42中,二号传动轴43的另一端端面上安装有二号连接座44,二号连接座44上安装有二号定位块45。其它组成及连接方式与具体实施方式六相同。
59.本实施方式中,从动旋转单元的结构与主动旋转单元的结构相同,二号定位块45的也与所要夹持的梁体端部配合设置,通过一号定位块310和二号定位块45配合可以对制动梁体进行稳定夹持,同时通过一号传动轴38和二号传动轴43配合带动制动梁体进行转动。
60.具体实施方式八:参照图1至图19说明本实施方式,本实施方式是对具体实施方式七所述的滑台模组5作进一步限定,本实施方式中所述滑台模组5包括横向滑台51、横向滑台驱动电机组52、纵向滑台53、纵向滑台驱动电机组54、滑台连接块55、滑台安装板56、竖向滑台57、竖向滑台驱动电机组58、部件安装板59、激光除锈器安装支架510、激光除锈器511、吸尘罩安装支架512和吸尘罩513;
61.所述横向滑台51包括两条横向滚珠丝杆滑轨和两个横向滑台滑块,两条横向滚珠丝杆滑轨沿主框架体1宽度方向的中心线对称设置,且每条横向滚珠丝杆滑轨搭设在两个l型框架的最上层梁体上,且每条横向滚珠丝杆滑轨与所在的l型框架的最上层梁体拆卸连接,每个横向滑台滑块设置在一条横向滚珠丝杆滑轨上,且每个横向滑台滑块与横向滚珠丝杆滑轨滑动连接,横向滑台驱动电机组52设置在两条横向滚珠丝杆滑轨的一端上,且横向滑台驱动电机组52驱动两条横向滚珠丝杆滑轨工作;
62.所述纵向滑台53包括一条纵向滚珠丝杆滑轨和一个纵向滑台滑块,纵向滑台滑块设置在纵向滚珠丝杆滑轨上,且纵向滑台滑块与纵向滚珠丝杆滑轨滑动连接,纵向滚珠丝杆滑轨设置在两个横向滑台滑块上,且纵向滚珠丝杆滑轨与每个横向滑台滑块拆卸连接,纵向滑台驱动电机组54设置在纵向滚珠丝杆滑轨的一端上,纵向滑台驱动电机组54驱动纵向滚珠丝杆滑轨工作,滑台连接块55设置在纵向滑台滑块上,且滑台连接块55与纵向滑台滑块固定连接,滑台安装板56固接在滑台连接块55远离横向滑台驱动电机组52的一端上;
63.所述竖向滑台57包括一条竖向滚珠丝杆滑轨和一个竖向滑台滑块,竖向滑台滑块设置在竖向滚珠丝杆滑轨上,且竖向滑台滑块与纵向滚珠丝杆滑轨滑动连接,竖向滚珠丝杆滑轨沿竖直方向设置在滑台安装板56上,且竖向滚珠丝杆滑轨的背侧与滑台安装板56拆卸连接,竖向滑台驱动电机组58设置在竖向滚珠丝杆滑轨的顶端,且竖向滑台驱动电机组58驱动竖向滚珠丝杆滑轨工作,部件安装板59为l型板,部件安装板59的一侧侧板安装在竖向滑台滑块上,激光除锈器安装支架510与吸尘罩安装支架512均安装在部件安装板59的另一侧侧板上,且激光除锈器安装支架510靠近竖向滑台57设置,激光除锈器511安装在激光除锈器安装支架510上,吸尘罩513安装在吸尘罩安装支架512上。其它组成及连接方式与具体实施方式七相同。
64.本实施方式中,滑台模组5是激光清扫机中清洗端与除尘器中吸尘端的主要移动部件,其中包含了x(横向)、y(纵向)、z(竖向)空间中三个方向的移动,其中横向滑台51中包含两个横向滚珠丝杠滑轨,每个横向滚珠丝杠滑轨上安装有一个横向滑台滑块,横向滑台驱动电机组52中包括一个双输出轴正反转电机,此种电机中两个输出轴同轴相背设置,两个输出轴的输出端均延伸出电机壳体,每个输出轴上设有一个减速机,每个输出轴与对应
减速机的动力输入端相连,每个减速机的动力输出端通过联轴器与一个横向滚珠丝杠滑轨中的丝杠相连,电机工作,带动两个减速机工作,每个减速机带动对应的滚珠丝杠转动,随着滚珠丝杠转动位于滚珠丝杠上的滑块沿着丝杠的轴线方向进行滑动,纵向滑台53中的纵向滚珠丝杠滑轨安装在横向滚珠丝杠滑轨上的两个横向滑台滑块上,并且随着横向滑台滑块的运动而运动,纵向滑台驱动电机组54包括一个正反转电机和一个减速器,正反转电机的输出轴与减速器的动力输入端相连,减速器的动力输出端通过联轴器与纵向滚珠丝杠滑轨中的滚珠丝杠相连,随着纵向滚珠丝杠转动位于滚珠丝杠上的纵向滑台滑块沿着丝杠的轴线方向进行滑动,竖向滑台57的组成与纵向滑台53的组成相同,其驱动方式也相同,在此不做过多赘述。
65.具体实施方式九:参照图1至图19说明本实施方式,本实施方式是对具体实施方式八所述的端部毛刷除锈机构8作进一步限定,本实施方式中所述端部毛刷除锈机构8包括毛刷安装板81、毛刷驱动电机82、主动轮83、转动轴84、从动轮86、皮带87、两个轴承架85和两个毛刷88;
66.所述毛刷安装板81安装在所在l型框架的中层梁体上,毛刷驱动电机82设置在毛刷安装板81内侧的下部,且毛刷驱动电机82的壳体与毛刷安装板81拆卸连接,两个轴承架85沿毛刷安装板81长度方向的中心线对称设置在毛刷安装板81内侧的上部,且每个轴承架85与毛刷安装板81拆卸连接,每个轴承架85上设有一个转动轴承,每个转动轴承的轴承外圈与所在的轴承架85固定连接,转动轴84插设在两个转动轴承中,且转动轴84与每个转动轴承的轴承内圈固定连接,主动轮83套装在毛刷驱动电机82的动力输出轴上,从动轮86套装在转动轴84上,且主动轮83与从动轮86通过皮带87传动连接,两个毛刷88分别套装在转动轴84的一端上,且每个毛刷88位于一个梁体定位块26的正上方。其它组成及连接方式与具体实施方式八相同。
67.本实施方式中,端部毛刷除锈机构8用于对制动梁的端部锈迹进行清扫,通过毛刷驱动电机82带动主动轮83转动,主动轮83通过皮带87带动从动轮86转动,从动轮86带动转动轴84转动,进而带动位于转动轴84两端的毛刷88转动,通过转动的毛刷与制动梁的端面接触通过机械摩擦的方式去除制动梁体端部的锈迹。
68.具体实施方式十:参照图1至图19说明本实施方式,本实施方式是对具体实施方式一所述的主框架体1作进一步限定,本实施方式中所述主框架体1的外侧安装有密封防尘板。
69.如此设置,用于保护主框架体1内部结构不会受到外部灰尘的影响,放置外部灰尘进入,保护除锈装置内部部件,同时也防止激光除锈产生的锈粉外泄,造成环境污染。
70.本实用新型已以较佳实施案例揭示如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,但是凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施案例所做的任何简单修改、等同变化与修饰,均仍属本实用新型技术方案范围。
71.工作原理
72.本装置在使用时,首先将需要进行除锈处理的制动梁体放置在两个气缸升降机构2中对应设置的一组梁体定位块26上,通过梁体定位块26上的v型槽对制动梁体进行定位,
待制动梁体定位好后,控制两个气缸升降机构2中的升降气缸22上升,带动制动梁体上升,同时启动毛刷驱动电机82,使其带动转动轴84及位于转动轴84端部的毛刷88转动,随着制动梁体上升,制动梁体的端部与转动的毛刷88接触,在制动梁体上升过程中通过机械摩擦的方式使毛刷88对制动梁体的端部进行清扫,制动梁体上升至主动伸缩旋转机构3与从动伸缩旋转机构4之间时,气缸升降机构2停止工作,同时通过推动气缸312工作带动电机安装板31靠近制动梁体,通过从动推动气缸47工作带动从动旋转单元安装板41靠近制动梁体,待一号定位块310与二号定位块45夹持住制动梁体后,控制两个气缸升降机构2中的升降气缸22下降,使梁体定位块26远离制动梁体,为制动梁体提供旋转工作空间,此时通过滑台模组5中的横向滑台51、纵向滑台53和竖直滑台57调整激光除锈器511的工作位置,使其可以设置在制动梁体的上方,且位于制动梁体的一端上,待位置调节固定后,启动激光清洗机6和除尘器7使激光除锈器511和吸尘罩513工作,通过横向滑台驱动电机组52带动横向滑台51工作,使位于横向滑台51上纵向滑台53沿横向滑台51的延伸方向进行移动,进而使激光除锈器511可以沿着制动梁长度方向运动,对制动梁体表面进行激光除锈工作,进行一次运动后,横向滑台驱动电机组52反转,使激光除锈器511回归于原位,此时控制电机32工作,带动主动旋转单元转动90
°
,主动旋转单元带动制动梁体和从动旋转单元也相应转动90
°
,此时重复上述动作,使激光除锈器511继续沿着制动梁体的长度方向进行往复运动一次,对制动梁体表面进行除锈,以此类推,使激光除锈器511对制动梁的四个表面进行除锈,待对梁体进行彻底除锈后,控制两个气缸升降机构2中的升降气缸22上升,使梁体定位块26对制动梁体进行支撑,此时,控制主动伸缩旋转机构3与从动伸缩旋转机构4远离制动梁体,控制两个气缸升降机构2中的升降气缸22下降,带动制动梁体下降,待制动梁体下降到初始位置,再将除锈后的制动梁体从装置上取下即可;
73.值得注意的是,由于制动梁体的四面的形面不同,因此在激光除锈器511对不同表面进行除锈时,也需要竖向滑台57工作去适应性的调节激光除锈器511的工作高度,避免与制动梁体发生碰撞,同时对梁体表面进行准确清理。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。