1.本实用新型涉及机械手技术领域,尤其涉及一种工业机器人连接臂。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中,相比于传统的工业设备,工业机器人有众多的优势,比如机器人具有易用性、智能化水平高、生产效率及安全性高、易于管理且经济效益显著等特点,使得它们可以在高危环境下进行作业;现有的机械手,其控制线一般内置于臂体中,但由于缺少固定结构,导致电线容易抽拉移动,导致接头容易松动,使其控制失灵。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人连接臂,将控制电线从壳体与臂体指间的通孔穿过,利用螺钉将连接座安装固定在固定座上,并根据电线的粗细,拧紧螺母,带动弧形压板移动,将电线夹紧固定,防止电线在移动,导致接头连接不稳定。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种工业机器人连接臂,包括臂体,臂体的两端分别设有a连接端和b连接端,且a连接端和b连接端上均设有连接孔,所述臂体的一侧连接有壳体,壳体与臂体之间形成通孔,通孔的两端均设有固定座,固定座与臂体相连,固定座上可拆卸连接有夹持结构。
6.优选地,所述夹持结构包括对称设置的连接座,连接座上连接有与其垂直设置的固定杆,两个连接座之间设有弧形压板,弧形压板的端部连接有连接耳,所述固定杆贯穿连接耳上开设的圆孔并螺纹连接有螺母。
7.优选地,所述连接座与连接耳之间设有弹簧,弹簧套接在固定杆上。
8.优选地,所述连接座上设有螺栓孔,螺栓孔内插接有连接螺钉,连接螺钉与固定座螺纹连接。
9.优选地,所述a连接端和b连接端均绕其中心连接有限位块,且限位块为弧形。
10.与现有技术相比,本实用新型的有益效果是:本实用新型结构简单,a连接端和b连接端用于安装伺服电机,控制臂体转动,将控制电线从壳体与臂体指间的通孔穿过,利用螺钉将连接座安装固定在固定座上,并根据电线的粗细,拧紧螺母,带动弧形压板移动,将电线夹紧固定,防止电线在移动,导致接头连接不稳定。
附图说明
11.为了更具体直观地说明本发明实施例或者现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简要介绍。
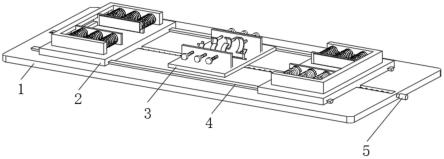
12.图1为本实用新型提出的结构示意图一;
13.图2为本实用新型提出的结构示意图二;
14.图3为图1中a部分结构放大图;
15.图4为本实用新型提出的结构示意图三;
16.图5为夹持结构的结构示意图。
17.图中:臂体1、壳体2、a连接端3、b连接端4、连接孔5、通孔6、固定座7、连接座8、弧形压板9、固定杆10、限位块11、弹簧12、螺母13。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
19.参照图1-5,一种工业机器人连接臂,包括臂体1,臂体1的两端分别设有a连接端3和b连接端4,且a连接端3和b连接端4上均设有连接孔5,臂体1的一侧连接有壳体2,壳体2与臂体1之间形成通孔6,通孔6的两端均设有固定座7,固定座7与臂体1相连,固定座7上可拆卸连接有夹持结构。
20.本实施方案中,夹持结构包括对称设置的连接座8,连接座8上连接有与其垂直设置的固定杆10,两个连接座8之间设有弧形压板9,弧形压板9的端部连接有连接耳,固定杆10贯穿连接耳上开设的圆孔并螺纹连接有螺母13,将控制电线从壳体2与臂体1指间的通孔6穿过,利用螺钉将连接座8安装固定在固定座7上,并根据电线的粗细,拧紧螺母13,带动弧形压板9移动,将电线夹紧固定,防止电线在移动,导致接头连接不稳定。
21.本实施方案中,连接座8与连接耳之间设有弹簧12,弹簧12套接在固定杆10上,利用弹簧12的回弹力,与螺母13配合,共同固定弧形压板9,防止其随意晃动。
22.本实施方案中,连接座8上设有螺栓孔,螺栓孔内插接有连接螺钉,连接螺钉与固定座7螺纹连接,a连接端3和b连接端4均绕其中心连接有限位块11,且限位块11为弧形,该限位块11用于限制其转动角度,防止其转动角度过度,导致其它零部件产生干涉。
23.本案中,a连接端3和b连接端4用于安装伺服电机,控制臂体1转动,将控制电线从壳体2与臂体1指间的通孔6穿过,利用螺钉将连接座8安装固定在固定座7上,并根据电线的粗细,拧紧螺母13,带动弧形压板9移动,将电线夹紧固定,防止电线在移动,导致接头连接不稳定。
24.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种工业机器人连接臂,包括臂体(1),臂体(1)的两端分别设有a连接端(3)和b连接端(4),且a连接端(3)和b连接端(4)上均设有连接孔(5),其特征在于,所述臂体(1)的一侧连接有壳体(2),壳体(2)与臂体(1)之间形成通孔(6),通孔(6)的两端均设有固定座(7),固定座(7)与臂体(1)相连,固定座(7)上可拆卸连接有夹持结构。2.根据权利要求1所述的一种工业机器人连接臂,其特征在于,所述夹持结构包括对称设置的连接座(8),连接座(8)上连接有与其垂直设置的固定杆(10),两个连接座(8)之间设有弧形压板(9),弧形压板(9)的端部连接有连接耳,所述固定杆(10)贯穿连接耳上开设的圆孔并螺纹连接有螺母(13)。3.根据权利要求2所述的一种工业机器人连接臂,其特征在于,所述连接座(8)与连接耳之间设有弹簧(12),弹簧(12)套接在固定杆(10)上。4.根据权利要求3所述的一种工业机器人连接臂,其特征在于,所述连接座(8)上设有螺栓孔,螺栓孔内插接有连接螺钉,连接螺钉与固定座(7)螺纹连接。5.根据权利要求4所述的一种工业机器人连接臂,其特征在于,所述a连接端(3)和b连接端(4)均绕其中心连接有限位块(11),且限位块(11)为弧形。
技术总结
本实用新型公开了一种工业机器人连接臂,包括臂体,臂体的两端分别设有A连接端和B连接端,且A连接端和B连接端上均设有连接孔,所述臂体的一侧连接有壳体,壳体与臂体之间形成通孔,通孔的两端均设有固定座,固定座与臂体相连,固定座上可拆卸连接有夹持结构。本实用新型结构简单,A连接端和B连接端用于安装伺服电机,控制臂体转动,将控制电线从壳体与臂体指间的通孔穿过,利用螺钉将连接座安装固定在固定座上,并根据电线的粗细,拧紧螺母,带动弧形压板移动,将电线夹紧固定,防止电线在移动,导致接头连接不稳定。致接头连接不稳定。致接头连接不稳定。
技术研发人员:储勇
受保护的技术使用者:宁国嘉翔智能装备科技有限公司
技术研发日:2022.07.07
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。