1.本实用新型涉及搬运设备,具体为一种适平衡性搬运机械。
背景技术:
2.叉车和起重机是常见的搬运设备,它们在平整路面能够满足大部分货物的搬运工作,但是,由于它们的体积相对庞大,需要较大的工作空间,在一些狭窄的地方操作则不方便;只适用于在近场工作,远距离运输较为困难;对于体积或重量超过单个叉车或起重机搬运能力的货物,通过多个设备协作较为困难,只能采用更大吨位的叉车或起重机;地形适应差,尤其高低不平路面,山形地面,难以保证被托举货物的稳定。
3.因此,设计一种适平衡搬运机械很有必要。
技术实现要素:
4.为此,本实用新型提供一种适平衡性搬运机械,通过自如行走和转向的车底盘,加上x、y、z三个方向的微调自由臂以及全方位调整的球摆托举机构,协同完成货物的搬运工作。该机械体积小巧,地形适应性好,可单台工作,也可多台协作,解决了场景适应性问题。
5.本实用新型采取的技术方案如下:
6.一种适平衡性搬运机械,包括有车底盘、三向微调机构、球摆托举机构和感知模块;
7.所述三向微调机构,包括有x向自由臂、z向自由臂和y向自由臂;其中,x向自由臂安装在车底盘上,z向自由臂安装在x向自由臂上,y向自由臂安装在z向自由臂上;
8.所述球摆托举机构,安装在所述y向自由臂上,包括有支架、托头、锁止销,所述支架和托头球铰接,所述支架和托头中可插拔安装所述锁止销。
9.进一步地:
10.所述x向自由臂为滑轨装置;
11.所述z向自由臂为升降装置;
12.所述y向自由臂为滑轨装置。
13.进一步地:
14.所述托头包括承载托盘和球头,所述承载托盘承载货物,所述球头与支架连接,所述锁止销插入时贯穿所述球头。
15.进一步地:
16.所述感知模块安装在所述球摆托举机构的底部;
17.所述感知模块包括视觉单元、姿态感知单元和测距单元。
18.一种适平衡性协作搬运系统,包括所述的适平衡性搬运机械,当搬运体积小和/或质量轻的货物时,使用一台所述的适平衡性搬运机械;当搬运体积大和/或质量重的货物时,使用多台所述的适平衡性搬运机械。
19.本实用新型相比于现有技术体现了如下的技术效果:
20.本实用新型提出的适平衡性搬运机械,体积小,重量轻,便于运输,操作灵活,在大型设备无法作业的工况下,能通过多台机械协作完成货物的搬运。
21.本实用新型提出的适平衡性搬运机械,具有多自由度,其地形适应性好,在路面条件较差时,通过协同作业能够保持货物稳定和安全的搬运。
附图说明
22.附图仅用于示出具体实施例的目的,而并不认为是对本实用新型的限制,在整个附图中,相同的参考符号表示相同的部件。
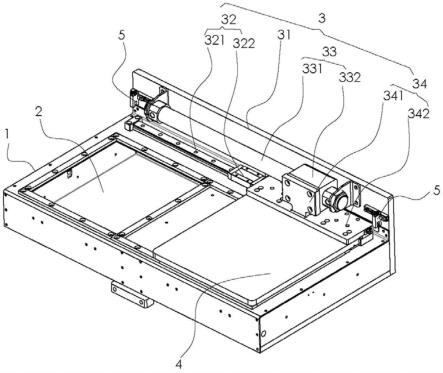
23.图1为本实用新型示出的单一机械结构拆解示意图;
24.图2为本实用新型示出的三向微调机构结构拆解图;
25.图3为本实用新型示出的球摆托举机构结构外观图;
26.图4为本实用新型示出的球摆托举机构结构剖视图;
27.图5为本实用新型示出的托头结构剖视图;
28.图6为本实用新型示出的多台机械协作搬运示意图。
具体实施方式
29.下面结合附图和实施例对本实用新型进行详细的描述,但本领域的技术人员应该知道,以下实施例并不是对本实用新型技术方案作的唯一限定,凡是在本实用新型技术方案精神实质下所做的任何等同变换或改动,均应视为属于本实用新型的保护范围。
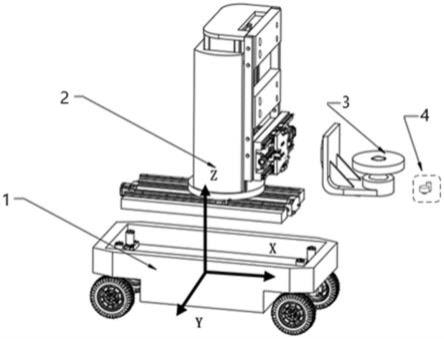
30.本实用新型提供了一种适平衡性搬运机械,如图1所示,包括有车底盘1、三向微调机构2、球摆托举机构3和感知模块4。
31.车底盘1具有车辆的基本行走功能,包括车轮、车体、行走控制组件和转向控制组件。在车体顶部安装有三向微调机构2。
32.三向微调机构2,如图2所示,包括有x向自由臂21、z向自由臂22和y向自由臂23。三个方向的规定:以车底盘中心为坐标原点,x方向平行于车底盘,x正方向指向货物;z方向垂直于车底盘,z正方向指向上方;y方向垂直于x方向和z方向,y正方向由右手法则确定。
33.其中,x向自由臂21安装在车底盘上,沿车体x方向布置,x向自由臂21设置有底板一211和滑轨装置212,底板一211的底部和车体固定连接,底板一211的上表面安装滑轨装置212,滑轨装置212包括电机、导轨和滑块,滑块在电机驱动下沿导轨滑动实现x向移动。
34.z向自由臂22安装在x向自由臂21的滑块上,z向自由臂22设置有底座221、升降装置222和举升支架223,底座221安装在x向自由臂21顶部的滑块上,升降装置222安装在底座221之上,举升支架223安装在升降装置222的侧面,升降装置222采用液压升降机构或者多级丝杠机构。
35.y向自由臂23安装在z向自由臂22的举升支架223上,所述举升支架223上设有多组固定装置,例如螺栓或锁止销,可在不同高度固定y向自由臂23。y向自由臂23机构与x向自由臂类似,设置有底板二231和滑轨装置232,滑轨装置包括电机、导轨和滑块,滑块在电机驱动下沿导轨滑动实现y向移动。滑块上固定球摆托举机构3。
36.所述三向微调机构2,具有三个方向平移自由度,三个方向的平移自由度分别由各自的驱动机构控制,即x方向、z方向、y方向三个方向。
37.球摆托举机构3,如图3-5所示,球摆托举机构3包括支架31、托头32、锁止销33。所述支架31通过螺栓固定在y向自由臂23上,所述托头32通过球铰与支架31连接,所述锁止销33安装在支架31和托头32之间的销孔324中。
38.所述托头32包括承载托盘321和球头322。托头32的上部为承载托盘321,承载托盘321的中心位置有一凹槽323,所述凹槽323与锁止销33的头部形状相配,凹槽323的直径大于销孔324的直径,凹槽323的开槽深度比锁止销33的头部稍高一些。凹槽323下边有销孔324,销孔324为通孔,一直贯穿整个托头32。凹槽323和销孔324的中心线为同一个中心线。锁止销33可插到凹槽323和销孔324中,锁止销33的头部与凹槽323装配,锁止销33的销体插到销孔324中,并穿过销孔324,使锁止销33的底部突出于支架31下方。
39.所述托头32的下部为球头322,球头322为球形,球头322与底部的支架31配合在一起形成球铰连接。当球铰连接时,球头322自由摆动,就会带动所述托头32摆动,即所述球摆托举机构3自由摆动。
40.当锁止销33插入凹槽323和销孔324中,即锁止销33穿过支架31和托头32时,插入的锁止销33限制托头32在x方向和y方向的摆动,托头32只能绕z方向转动,因此限值了托头32的自由摆动,即限值了球摆托举机构3的自由摆动。此种情况适用于单一机械搬运工作时。
41.当锁止销33从凹槽323和销孔324中拔出,即锁止销33从支架31和托头32拔出时,托头32与支架31通过球铰连接,托头32能够实现各个方向的自由摆动,即球摆托举机构3可在各方向自由摆动。此种情况适用于多台机械协作搬运工作时。
42.感知模块4设置在球摆托举机构3的承载托盘321的下方位置。所述感知模块4包括视觉单元、姿态感知单元和测距单元。视觉单元用来引导车辆行驶至目标位置;姿态感知单元用来检测搬运过程中货物的姿态,避免货物发生倾覆;测距单元用来感知货物与目标位置之间的距离。
43.该适平衡性搬运机械可单一机械搬运工作,也可多台协同工作。
44.当单一机械进行搬运工作时,将锁止销33插入到支架31和托头32中,此时托头32只能绕z轴旋转,托头保持相对平稳,能够托住货物,即球摆托举机构3相对稳定。
45.当多台机械协作搬运体积大、质量大的货物时,将锁止销33拔出,支架31和托头32能够实现相对转动,使托头32能够和货物搬运底面更好贴合。
46.采用多机械协作工作时,首先多台机械同时运动到货物附近,将锁止销33从支架31和托头32中取出,使支架31和托头32通过球铰连接,此时托头32相对自由转动,使承载托盘321能与货物底部良好接触。
47.在搬运过程中,多台机械同时控制各自的三向微调机构2,通过驱动某一方向移动,从而带动货物向某一方向移动。
48.在搬运过程中,以目标地行驶方向定义为货物前方,调整货物俯仰角度时(使货物绕x轴转动),位于货物前方的机械通过调整三向微调机构2将货物向上(或向下)平移,位于货物后方的机械通过调整三向微调机构2将货物相对于前方向相反方向平移(向下/向上),从而调整货物的俯仰角度(使货物绕x轴转动)。
49.调整货物侧倾角度时(使货物绕y轴转动),位于货物右侧的机械通过调整三向微调机构2将货物向上(或向下)平移,位于货物左侧的机械将货物向相反方向平移,从而调整
货物的侧倾角度(使货物绕y轴转动)。
50.调整货物的横摆角度时,所有机械通过调整三向微调机构2,使货物顺时针或逆时针转动,从而调整货物的横摆角度(使货物绕z轴转动)。
51.在搬运过程中,如果出现承载托盘不能与货物底部良好接触,则通过调整球摆托举机构3相对自由转动,使其接触。
52.在搬运过程中,通过感知模块4的姿态感知单元对货物的姿态进行监控,并通过球摆托举机构3调整货物的姿态,防止货物脱落,通过感知模块4的视觉单元引导行驶到指定位置,通过感知模块4的测距单元判断货物与目标位置的距离,将货物移动到目标位置,完成搬运过程。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。