1.本技术涉及机械领域,尤其涉及一种无线遥控举升装置。
背景技术:
2.举升装置,尤其是带有千斤顶单元的举升装置广泛应用于生活的各个领域,例如车辆维修、抢险救灾、特种作业等场景。对于需要具备无线遥控能力的举升装置,通常需要具备举升及自主移动的能力,这使得现有的举升装置往往将车架作为千斤顶的支撑点,使的对车身的强度、材料、结构设计等有较高的要求;而,一般半自动的举升装置,其可以以底面作为直接的受力支撑点,但这使得其行动能力受限或者需要对千斤顶设置单独的转向结构。
3.如何解决上述问题,提供一种轻量化、便捷、低成本的无线遥控举升装置,是本领域技术人员需要考虑的。
技术实现要素:
4.有鉴于此,本技术提供一种轻量化、便捷、低成本的无线遥控举升装置。
5.本技术实施例提供一种无线遥控举升装置,包括:
6.车架;
7.驱动模组,包括舵轮组件、定向轮以及多个弹性支撑件,所述舵轮组件及所述定向轮分别通过至少一个所述弹性支撑件与所述车架连接;
8.举升模组,包括液压千斤顶,所述液压千斤顶与所述车架连接,所述液压千斤顶为立式设置,所述液压千斤顶包括间隔的第一端部及第二端部,所述第一端部设于所述车架靠近所述弹性支撑件一侧,所述第二端部设于所述车架远离所述弹性支撑件一侧,所述第一端部设有容置槽;
9.影像模组,包括摄像头,所述摄像头设于所述容置槽内;以及
10.控制模组,包括控制箱和遥控器,所述控制箱与所述遥控器建立无线通讯连接,所述控制箱与所述驱动模组、所述举升模组以及所述影像模组通讯连接。
11.在一种可能的实施方式中,所述无线遥控举升装置包括举升状态及非举升状态;在所述非举升状态下,所述第二端部悬空,所述舵轮组件及所述定向轮为所述车架提供支撑;在所述举升状态下,所述第二端部接地,所述第二端部、所述舵轮组件及所述定向轮为所述车架提供支撑。
12.在一种可能的实施方式中,所述弹性支撑件在所述举升状态下的形变压缩量大于所述弹性支撑件在所述非举升状态下的形变压缩量。
13.在一种可能的实施方式中,所述容置槽由所述第一端部的表面朝向所述第二端部凹陷形成,所述摄像头完全容纳于所述容置槽内。
14.在一种可能的实施方式中,所述摄像头具备独立电源,所述摄像头与所述控制模组或所述遥控器建立无线通讯连接,所述遥控器还包括显示屏,所述显示屏至少用于显示
所述摄像头获取的图像数据。
15.在一种可能的实施方式中,所述车架包括主骨架以及连接架,所述连接架与所述主骨架连接并设于所述主骨架同一侧,所述连接架与所述第二端部连接;所述舵轮组件及所述定向轮设于所述主骨架的同一侧,所述连接架、所述舵轮组件以及所述定向轮设于所述主骨架的同一侧。
16.在一种可能的实施方式中,所述液压千斤顶设于所述舵轮组件与所述定向轮之间,所述舵轮组件的数量为一个,所述定向轮的数量为两个。
17.在一种可能的实施方式中,所述舵轮组件包括轮毂电机、舵机驱动电机、舵机传动齿轮以及第一连杆,所述轮毂电机与所述第一连杆固定连接,所述舵机传动齿轮与所述第一连杆传动连接,所述舵机驱动电机与所述舵机传动齿轮传动连接,所述弹性支撑件设于所述第一连杆远离所述轮毂电机一侧;一个所述定向轮通过一第二连杆与一个所述弹性支撑件连接,所述弹性支撑件设于所述第二连杆远离所述定向轮一侧。
18.在一种可能的实施方式中,所述举升模组还包括气动助力器、第一气动电磁阀、第二气动电磁阀以及液压电磁阀,气动助力器与所述第二端部连接,所述第一气动电磁阀与所述气动助力器连接,所述第二气动电磁阀连接于所述液压千斤顶的第一端部,液压电磁阀连接于所述液压千斤顶的第二端部。
19.在一种可能的实施方式中,还包括动力模组,所述动力模组包括气动单元及电动单元所述气动单元与所述举升模组连通,所述电动单元与所述舵轮组件及控制模组电连接。
20.相较于现有技术,本技术的无线遥控举升装置,通过设置弹性支撑件,使得当无线遥控举升装置在非举升状态时,液压千斤顶不与地面接触,无线遥控举升装置可藉由舵轮组件及定向轮实现便捷地运动;当无线遥控举升装置在举升状态时,液压千斤顶可与地面接触,藉由地面提供足够的方向支撑,从而降低了对车架、舵轮组件及定向轮的强度要求,使得无线遥控举升装置可更加轻便。同时,本技术的无线遥控举升装置,通过将具备独立电源的摄像头设置于液压千斤顶端部的容置槽中,使得在不增加过多摄像头的情况下可获得更好的视野,在提升精度的同时有效控制成本。
附图说明
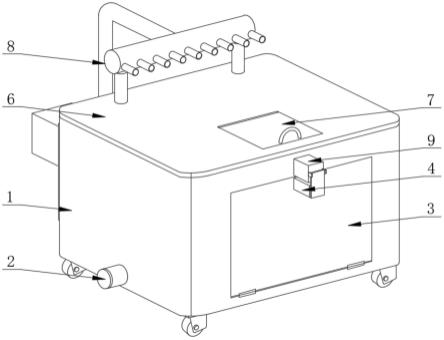
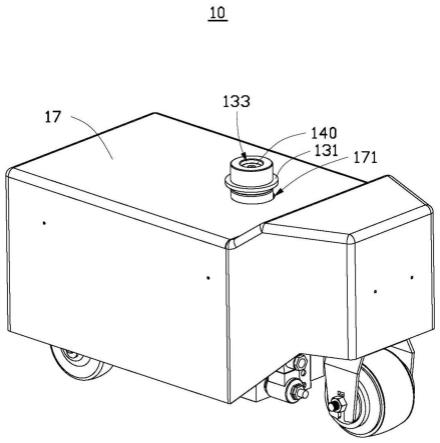
21.图1为本技术实施例提供的无线遥控举升装置的立体示意图。
22.图2为图1的无线遥控举升装置隐藏壳体后的立体示意图。
23.图3为图2的局部立体示意图。
24.图4为图1的无线遥控举升装置的车架及驱动模组的立体示意图。
25.图5为图1的无线遥控举升装置的舵轮组件的立体示意图。
26.图6为图1的无线遥控举升装置的举升模组的立体示意图。
27.图7为图1的无线遥控举升装置的遥控器的立体示意图。
28.主要元件符号说明
29.无线遥控举升装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
30.车架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
31.主骨架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111
32.连接架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112
33.驱动模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
34.舵轮组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120
35.轮毂电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121
36.舵机驱动电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122
37.舵机传动齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123
38.第一连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
124
39.定向轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
125
40.第二连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
126
41.弹性支撑件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
127
42.举升模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
43.液压千斤顶
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130
44.第一端部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131
45.第二端部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132
46.容置槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
133
47.气动助力器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
134
48.第一气动电磁阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
135
49.第二气动电磁阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
136
50.液压电磁阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
137
51.管道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
138
52.影像模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
53.摄像头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
140
54.控制模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15
55.控制箱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
151
56.遥控器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
152
57.显示屏
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
153
58.动力模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16
59.气动单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
161
60.电动单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
162
61.气源连接管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
163
62.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17
63.第一开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
171
64.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
65.以下描述将参考附图以更全面地描述本技术内容。附图中所示为本技术的示例性实施例。然而,本技术可以以许多不同的形式来实施,并且不应该被解释为限于在此阐述的示例性实施例。提供这些示例性实施例是为了使本技术透彻和完整,并且将本技术的范围充分地传达给本领域技术人员。类似的附图标记表示相同或类似的组件。
66.本文使用的术语仅用于描述特定示例性实施例的目的,而不意图限制本技术。如本文所使用的,除非上下文另外清楚地指出,否则单数形式“一”,“一个”和“该”旨在也包括复数形式。此外,当在本文中使用时,“包括”和/或“包含”和/或“具有”,整数,步骤,操作,组件和/或组件,但不排除存在或添加一个或多个其它特征,区域,整数,步骤,操作,组件,组件和/或其群组。
67.除非另外定义,否则本文使用的所有术语(包括技术和科学术语)具有与本技术所属领域的普通技术人员通常理解的相同的含义。此外,除非文中明确定义,诸如在通用字典中定义的那些术语应该被解释为具有与其在相关技术和本技术内容中的含义一致的含义,并且将不被解释为理想化或过于正式的含义。
68.以下内容将结合附图对示例性实施例进行描述。须注意的是,参考附图中所描绘的组件不一定按比例显示;而相同或类似的组件将被赋予相同或相似的附图标记表示或类似的技术用语。
69.下面参照附图,对本技术的具体实施方式作进一步的详细描述。
70.如图1至图7所示,本技术实施例提供一种无线遥控举升装置10,包括车架11、驱动模组12、举升模组13、影像模组14、控制模组15、动力模组16以及壳体17。
71.驱动模组12包括舵轮组件120、定向轮125以及多个弹性支撑件127,舵轮组件120及定向轮125分别通过至少一个弹性支撑件127与车架11连接。
72.举升模组13包括液压千斤顶130,液压千斤顶130与车架11连接,液压千斤顶130为立式设置。液压千斤顶130包括间隔的第一端部131及第二端部132,第一端部131设于车架11靠近弹性支撑件127一侧,第二端部132设于车架11远离弹性支撑件127一侧。第一端部131设有容置槽133。
73.影像模组14包括摄像头140,摄像头140设于容置槽133内。
74.控制模组15包括控制箱151和遥控器152,控制箱151与遥控器152建立无线通讯连接,控制箱151与驱动模组12、举升模组13以及影像模组14通讯连接。
75.于一实施例中,无线遥控举升装置10包括举升状态及非举升状态。在非举升状态下,第二端部132悬空,舵轮组件120及定向轮125为车架11提供支撑。在举升状态下,第二端部132接地,第二端部132、舵轮组件120及定向轮125为车架11提供支撑。
76.进一步的,在非举升状态下,液压千斤顶130未处于工作状态,舵轮组件120及定向轮125为车架11提供支撑并引导无线遥控举升装置10移动。在举升状态下,无线遥控举升装置10停止运动,液压千斤顶130开始工作,第一端部131升起并与待支撑物(例如汽车底盘)接触,在反作用力下,弹性支撑件127的弹力被克服,使车架11向下移动至第二端部132与地面接触并获得支撑,随后由第一端部131顶起待支撑物。
77.本技术的无线遥控举升装置10,通过设置弹性支撑件127,使得当无线遥控举升装置10在非举升状态时,液压千斤顶130不与地面接触,无线遥控举升装置10可藉由舵轮组件120及定向轮125实现便捷地运动;当无线遥控举升装置10在举升状态时,液压千斤顶130可与地面接触,藉由地面提供足够的方向支撑,从而降低了对车架11、舵轮组件120及定向轮125的强度要求,使得无线遥控举升装置10可更加轻便。同时,本技术的无线遥控举升装置10,通过将具备独立电源的摄像头140设置于液压千斤顶130端部的容置槽133中,使得在不增加过多摄像头140的情况下可获得更好的视野,在提升精度的同时有效控制成本。
78.于一实施例中,弹性支撑件127在举升状态下的形变压缩量大于弹性支撑件127在非举升状态下的形变压缩量。
79.进一步的,弹性支撑件127自然状态下(非举升状态)处于压缩状态,多个弹性支撑件127对车架11提供的支撑力之和略大于车架11以及车架11所承载的其他单元组件的重量之和,在没有其它外力作用时能够托起车架11,目的是使装于车架11上的液压千斤顶130的底部悬于地面之上保持适当距离,此外,弹性支撑件127的另一作用是在无线遥控举升装置10行驶时起到减震的作用。
80.于一实施例中,容置槽133由第一端部131的表面朝向第二端部132凹陷形成,摄像头140完全容纳于容置槽133内。
81.进一步的,容置槽133的深度可大于摄像头140放入容置槽133后的最大深度,即,摄像头140放入容置槽133后被第一端部131的侧壁结构保护。
82.于一实施例中,摄像头140具备独立电源,摄像头140与控制模组15或遥控器152建立无线通讯连接,遥控器152还包括显示屏153,显示屏153至少用于显示摄像头140获取的图像数据。
83.进一步的,摄像头140的视野可朝向正上方设置,以提升拍摄精度,摄像头140将获取的图像数据传输至遥控器152的显示屏153,便于操作人员进行判断及操作,以确定液压千斤顶130的举升点。
84.于一实施例中,车架11包括主骨架111以及连接架112,连接架112与主骨架111连接并设于主骨架111同一侧,连接架112与第二端部132连接;舵轮组件120及定向轮125设于主骨架111的同一侧,连接架112、舵轮组件120以及定向轮125设于主骨架111的同一侧。
85.于一实施例中,液压千斤顶130设于舵轮组件120与定向轮125之间,舵轮组件120的数量为一个,定向轮125的数量为两个;其中,舵轮组件120作为进行驱动及导向的主动轮,定向轮125作为从动轮。
86.进一步的,舵轮组件120设于主骨架111的前端,两个定向轮125间隔设于主骨架111的后端,举升模组13设于主骨架111单侧的容纳空间内,液压千斤顶130大致位于中间位置。第一端部131与第二端部132位于主骨架111相背的两侧,即,第一端部131位于主骨架111上侧,第二端部132位于主骨架111下侧。
87.于一实施例中,舵轮组件120包括轮毂电机121、舵机驱动电机122、舵机传动齿轮123以及第一连杆124。轮毂电机121与第一连杆124固定连接,舵机传动齿轮123与第一连杆124传动连接,舵机驱动电机122与舵机传动齿轮123传动连接;弹性支撑件127设于第一连杆124远离轮毂电机121一侧;一个定向轮125通过一第二连杆126与一个弹性支撑件127连接,弹性支撑件127设于第二连杆126远离定向轮125一侧。
88.在本实施例中,轮毂电机121通过正反转实现无线遥控举升装置10的前进后退,舵机驱动电机122正反转通过舵机传动齿轮123传动实现无线遥控举升装置10的左右转向。
89.于一实施例中,举升模组13还包括气动助力器134、第一气动电磁阀135、第二气动电磁阀136、液压电磁阀137以及管道138。气动助力器134与第二端部132连接,第一气动电磁阀135与气动助力器134通过管道138连接,第二气动电磁阀136通过管道138连接于液压千斤顶130的第一端部131,液压电磁阀137连接于液压千斤顶130的第二端部132。
90.进一步的,气动助力器134是一种专用气液转换器,气动助力器134的活塞气腔在
气压和弹簧外力作用下使活塞作循环往复运动使活塞的液体侧具有循环泵油的功能,进而使液压千斤顶130在活塞的作用下完成举升动作。液压千斤顶130执行举升动作时液压千斤顶130活塞向上运动,当液压千斤顶130活塞顶到重物后,重物支撑点的反作用力作用下克服弹性支撑件127的弹力使第二端部132向下运动直至其底部接触地面,此时液压千斤顶130活塞继续上升将重物顶起。液压电磁阀137用于液压千斤顶130的泄油,通过引入液压电磁阀137可解决传统结构中需进行手动泄油的问题,提升无线遥控举升装置10的自动化程度。第一气动电磁阀135用于气动助力器134的控制,第二气动电磁阀136用于液压千斤顶130的复位。
91.于一实施例中,动力模组16包括气动单元161及电动单元162,气动单元161与举升模组13连通,电动单元162与舵轮组件120及控制模组15电连接。
92.在本实施例中,气动单元161用于驱动举升模组13,气动单元可以为单独的气体存储仓或连接有气源连接管163的气源,也可以是包括有前述的气动助力器134、第一气动电磁阀135及第二气动电磁阀136的气动驱动模组结构,并不限于此。
93.在本实施例中,电动单元162可以为包括有至少一组储能单元的储能包,该储能包可以为蓄电池或小型发电机;电动单元162设于液压千斤顶130的一侧,控制箱151设于液压千斤顶130的另一侧。
94.壳体17套设于车架11上以保护无线遥控举升装置10内部电子元器件,壳体17上开设有第一开口171,第一端部131通过第一开口171伸出壳体17外部。
95.上文中,参照附图描述了本技术的具体实施方式。但是,本领域中的普通技术人员能够理解,在不偏离本技术的精神和范围的情况下,还可以对本技术的具体实施方式作各种变更和替换。这些变更和替换都落在本技术所限定的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。