1.本公开涉及马达(motor)控制装置、马达系统及马达控制方法。
背景技术:
2.以往,熟知一种藉由使用与逆变器(inverter)电路的直流母线连接的1个分流(shunt)电阻来对用于控制马达的各相(phase)的相电流进行检测的1分流电流检测方式(例如,参见专利文件1)。
3.[引证文件]
[0004]
[专利文件]
[0005]
[专利文件1](日本)特开2015-208071号公报
技术实现要素:
[0006]
《要解决的技术问题》
[0007]
当藉由1分流电流检测方式对马达进行控制时,在逆变器使转子(rotor)旋转之前(马达启动之前),可能会检测流入1分流的电流检测器的电流。马达启动之前所检测的电流例如可用于马达启动之前的故障检测,或者可用于提高当马达被逆变器启动且逆变器正在使转子旋转时的电流检测和/或故障检测的精度。
[0008]
然而,如果当转子在逆变器使转子旋转之前正在进行空转时对流入1分流的电流检测器的电流进行检测,则转子的旋转可能会受到空转期间(即,正在进行空转的期间)内的转子中产生的再生制动(regenerative brake)的阻碍。空转期间内的转子的旋转受到阻碍后,例如可能会发生马达减速、异常噪音等的意外举动(behavior)。
[0009]
本公开的目的在于,提供一种通过检测流入电流检测器的电流可减轻转子空转受阻碍的马达控制装置、马达系统及马达控制方法。
[0010]
《技术方案》
[0011]
本公开的一个实施方式的马达控制装置具备:
[0012]
逆变器,通过导通(on)所有臂中的每个通电模式(pattern)都不同的一部分的臂,使具有转子的马达通电;
[0013]
电流检测器,与所述逆变器的直流侧连接;
[0014]
pwm信号生成部,藉由均为相同值的占空比(duty ratio)生成具有第1周期区间的各相的pwm信号,所述第1周期区间包括在所述转子的空转期间内以第1通电模式使所述一部分的臂导通的第1区间、在所述空转期间内以第2通电模式使所述一部分的臂导通的第2区间、及在所述空转期间内以第3通电模式使所述所有臂中的所有上臂或所有下臂导通的第3区间;及
[0015]
电流检测部,通过从所述第1区间内流入所述电流检测器的第1相的第1电流值或所述第2区间内流入所述电流检测器的所述第1相的第2电流值减去所述第1电流值和所述第2电流值之和的一半,计算所述空转期间内的所述第1相的偏移(offset)电流值。
[0016]
《有益效果》
[0017]
根据本公开,通过检测流入电流检测器的电流可减轻转子空转受阻碍。
附图说明
[0018]
[图1]本公开的实施方式1的马达系统的构成例的示意图。
[0019]
[图2]多个pwm信号的波形、这些pwm信号的每个周期的载波(carrier)的波形、及各相的相电压指令的波形的例示图。
[0020]
[图3]通电时的各臂的开关状态(switching state)的一例的示意图。
[0021]
[图4]不通电时的各臂的开关状态的一例的示意图。
[0022]
[图5]藉由基于占空比均为50%的各相的pwm信号使逆变器的所有臂中的一部分的臂导通而流入电流检测器的各相的偏移电流的例示时序图(timing chart)。
[0023]
[图6]当逆变器基于哪一个的占空比都不为50%的各相的pwm信号正在使转子旋转时藉由使与图5相同的一部分的臂导通而流入电流检测器的各相的相电流的例示时序图。
[0024]
[图7]当对在逆变器使转子旋转之前流入电流检测器的电流的电流值进行检测时的pwm信号的波形的1个比较例的示意图。
[0025]
[图8]在不通电区间内下臂都处于导通状态的情形的示意图。
[0026]
[图9]在不通电区间内上臂都处于导通状态的情形的示意图。
[0027]
[图10]在不通电区间内上下臂都处于断开(off)状态的情形的示意图。
[0028]
[图11]当对在逆变器使转子旋转之前流入电流检测器的电流的电流值进行检测时的pwm信号的波形的第1例的示意图。
[0029]
[图12]藉由基于占空比均为50%的各相的pwm信号使逆变器的所有臂中的一部分的臂导通而流入电流检测器的u相电流的电流波形的一例的放大图。
[0030]
[图13]当对在逆变器使转子旋转之前流入电流检测器的电流的电流值进行检测时的pwm信号的波形的第2例的示意图。
[0031]
[图14]负的u相电流
“‑
iu”流入电流检测器的开关状态的示意图。
[0032]
[图15]正的u相电流“ iu”流入电流检测器的开关状态的示意图。
[0033]
[图16]表示转子空转时的pwm信号的10个周期内的u相偏移电流值的计算处理的一例的波形图。
[0034]
[图17]图16所示的由虚线框包围的一部分的放大图。
[0035]
[图18]表示u相偏移电流值的计算处理的一例的波形图。
[0036]
[图19]表示w相偏移电流值的计算处理的一例的波形图。
具体实施方式
[0037]
下面参见附图对本公开的实施方式的马达控制装置、马达系统及马达控制方法进行详细说明。
[0038]
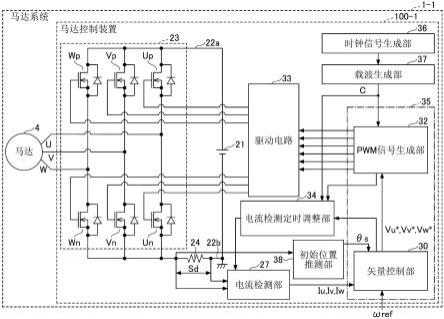
图1是本公开的实施方式1的马达系统1-1的构成例的示意图。图1所示的马达系统1-1用于控制马达4的旋转动作。可安装马达系统1-1的设备例如为复印机、个人计算机、冰箱、泵等,但该设备并不限定于此。马达系统1-1至少具备马达4和马达控制装置100-1。
[0039]
马达4为具有多个线圈的永磁同步马达。马达4例如具有包括u相线圈、v相线圈及w相线圈的3相线圈。作为马达4的具体示例,可列举出3相无刷直流马达(电动机)等。马达4具备配置有至少1个永磁体的转子和围绕该转子的轴而配置的定子(stator)。马达4为不使用对转子的磁铁的角度位置(磁极位置)进行检测的位置传感器的无传感器式马达。马达4例如是使送风用的风扇进行旋转的风扇马达。
[0040]
马达控制装置100-1藉由基于包括3相的pwm信号的通电模式对3相桥接的多个切换元件(也称开关元件)进行开(导通)关(切断)(on、off)控制而经由将直流转换为3相交流的逆变器对马达进行驱动。马达控制装置100-1具备逆变器23、电流检测部27、电流检测定时(timing)调整部34、驱动电路33、通电模式生成部35、载波生成部37及时钟信号生成部36。
[0041]
逆变器23是藉由通过多个切换元件的切换将从直流电源21供给的直流转换为3相交流并使3相交流的驱动电流流入马达4从而使马达4的转子进行旋转的电路。逆变器23根据由通电模式生成部35生成的多个通电模式(具体而言,由通电模式生成部35内的pwm信号生成部32生成的3相的pwm信号)对马达4进行驱动。pwm是指pulse width modulation(脉冲宽度调制)。
[0042]
逆变器23具有3相桥接的多个臂up、vp、wp、un、vn、wn。上臂up、vp、wp分别为与直流电源21的正极侧经由正侧母线(正母线)22a而连接的高端(high side)切换元件。下臂un、vn、wn分别为与直流电源21的负极侧(具体而言,接地侧)连接的低端(low side)切换元件。多个臂up、vp、wp、un、vn、wn分别根据基于上述通电模式中包含的pwm信号而从驱动电路33供给的多个驱动信号中的对应的驱动信号进行导通或切断。下面,在不需要对多个臂up、vp、wp、un、vn、wn进行特别区分的情况下,有时也将它们简称为臂。
[0043]
u相上臂up和u相下臂un的连接点与马达4的u相线圈的一端连接。v相上臂vp和v相下臂vn的连接点与马达4的v相线圈的一端连接。w相上臂wp和w相下臂wn的连接点与马达4的w相线圈的一端连接。u相线圈、v相线圈及w相线圈各自的另一端彼此相接。
[0044]
作为臂的具体示例,可列举出n通道型mosfet(metal oxide semiconductor field effect transistor)、igbt(insulated gate bipolar transistor)等。但是,臂并不限定于此。
[0045]
电流检测器24与逆变器23的直流侧连接,并输出与流入逆变器23的直流侧的电流的电流值对应的检测信号sd。图1所示的电流检测器24产生与流过负侧母线(负母线)22b的电流的电流值对应的检测信号sd。电流检测器24例如是配置在负母线22b上的电流检测元件,具体而言,为插入负母线22b的分流电阻。分流电阻等的电流检测元件生成与流过自身的电流的电流值对应的电压信号,并将其作为检测信号sd。
[0046]
电流检测部27基于由通电模式生成部35生成的多个通电模式(具体而言,3相的pwm信号)获取检测信号sd,由此对流入马达4的u、v、w各相的相电流iu、iv、iw进行检测。详言之,电流检测部27在与多个通电模式(具体而言,3相的pwm信号)同步的获取定时(timing)获得检测信号sd,藉此对流入马达4的u、v、w各相的相电流iu、iv、iw进行检测。检测信号sd的获取定时由电流检测定时调整部34设定。
[0047]
例如,电流检测部27在由电流检测定时调整部34设定的获取定时将由电流检测器24产生的模拟电压的检测信号sd输入ad(analog to digital)转换器。该ad转换器设置于
电流检测部27。之后,电流检测部27对输入的模拟检测信号sd进行ad转换以将其转换为数字检测信号sd,并对ad转换后的数字检测信号sd进行数字处理,由此对马达4的u、v、w各相的相电流iu、iv、iw进行检测。由电流检测部27检测的各相的相电流iu、iv、iw的检测值被供给至通电模式生成部35。
[0048]
时钟信号生成部36是藉由内置的振荡电路生成预定频率的时钟信号并将所生成的时钟信号输出至载波生成部37的电路。需要说明的是,时钟信号生成部36例如与马达控制装置100-1的电源被接通(投入)的同时开始进行动作(操作/工作)。
[0049]
载波生成部37根据由时钟信号生成部36生成的时钟信号生成载波c。载波c是电平(level)呈周期性增减的载波信号。
[0050]
通电模式生成部35生成使逆变器23通电的模式(逆变器23的通电模式)。逆变器23的通电模式也可被称为使马达4通电的模式(马达4的通电模式)。逆变器23的通电模式中包含使逆变器23通电的3相的pwm信号。通电模式生成部35具有pwm信号生成部32,该pwm信号生成部32根据由电流检测部27检测的马达4的相电流iu、iv、iw的检测值生成使逆变器23通电的3相的pwm信号,以使马达4进行旋转。
[0051]
通电模式生成部35在通过矢量控制来生成逆变器23的通电模式的情况下还具有矢量控制部30。需要说明的是,本实施方式中藉由矢量控制生成了逆变器的通电模式,但并不限定于此,还可使用vf控制等求得各相的相电压。
[0052]
当从外部被赋予了马达4的旋转速度指令ωref后,矢量控制部30根据马达4的旋转速度的测定值或推测值和旋转速度指令ωref之间的差分生成转矩(torque)电流指令iqref和励磁电流指令idref。矢量控制部30根据马达4的u、v、w各相的相电流iu、iv、iw并藉由使用了转子位置θ的矢量控制运算来计算转矩电流iq和励磁电流id。矢量控制部30例如对转矩电流指令iqref和转矩电流iq之间的差分进行pi控制运算,由此生成电压指令vq。矢量控制部30例如对励磁电流指令idref和励磁电流id之间的差分进行pi控制运算,由此生成电压指令vd。矢量控制部30使用上述转子位置θ将电压指令vq、vd转换为u、v、w各相的相电压指令vu*、vv*、vw*。转子位置θ表示马达4的转子的磁极位置。
[0053]
pwm信号生成部32通过将由矢量控制部30生成的相电压指令vu*、vv*、vw*与由载波生成部37生成的载波c的电平进行比较,生成包含3相pwm信号的通电模式。pwm信号生成部32也生成用于使上臂驱动用的3相pwm信号反转的下臂驱动用的pwm信号,并且,根据需要附加死区时间(dead time)后,将包含所生成的pwm信号的通电模式输出至驱动电路33。
[0054]
驱动电路33根据被赋予的包含pwm信号的通电模式输出使逆变器23中包含的6个臂up、vp、wp、un、vn、wn进行切换的驱动信号。据此,3相交流的驱动电流被供给至马达4,马达4的转子可进行旋转。
[0055]
电流检测定时调整部34根据从载波生成部37供给的载波c和包含由pwm信号生成部32生成的pwm信号的通电模式,确定用于使电流检测部27在载波c的1个周期内对3个相的相电流中的任一相的相电流进行检测的获取定时。
[0056]
电流检测部27在由电流检测定时调整部34确定的多个获取定时获取检测信号sd,藉此对相电流iu、iv、iw进行检测。电流检测部27按照从1个电流检测器24对多个相电流进行检测的方式(即,所谓的1分流电流检测方式)来检测相电流iu、iv、iw。
[0057]
另外,作为在无传感器式永磁同步电动机处于停止状态时对转子的磁极位置(初
始位置)进行推测的方法,存在一种被称为感应检测(inductive sensing)的方法。感应检测是指,利用电感的转子位置依赖性对永磁同步马达的转子磁铁的磁极位置进行检测的方法。该位置检测方法不使用马达的感应电压,故即使在马达的转子处于停止或极低速的状态下也可对转子磁铁的磁极位置进行检测。转子处于极低速的状态是指,转子以马达控制装置实质上无法检测感应电压的低速进行旋转的状态。本说明书中,为了便于描述,将“转子处于停止或极低速的状态”简称为“转子的停止状态”。
[0058]
本实施方式1的马达控制装置100-1具备藉由感应检测对马达的转子的停止状态下的磁极位置即初始位置θs进行推测的初始位置推测部38。通电模式生成部35使用由初始位置推测部38推测的初始位置θs将包含用于使马达4的转子进行旋转的pwm信号的通电模式输出至驱动电路33。矢量控制部30将由初始位置推测部38推测的初始位置θs使用为转子位置θ的初始值,由此将电压指令vq、vd转换为相电压指令vu*、vv*、vw*。需要说明的是,本公开中,作为一例,初始位置θs为具有30度的宽度的值。在这样的情况下,使用根据初始位置θs而确定的预定的值来进行马达4的控制。
[0059]
图2是对多个pwm信号u、v、w的波形、这些pwm信号的每个周期的载波c的波形、及各相的相电压指令vu*、vv*、vw*的波形进行例示的图。
[0060]
pwm信号生成部32根据各相的相电压指令vu*、vv*、vw*和载波c的电平之间的大小关系生成多个pwm信号u、v、w。
[0061]
pwm信号u是用于对构成u相的上下臂的2个切换元件进行驱动的pwm信号。该例子中,当pwm信号u为低电平时,u相的下臂的切换元件变为导通(on)(u相的上臂的切换元件变为切断(off)),当pwm信号u为高电平时,u相的下臂的切换元件变为切断(u相的上臂的切换元件变为导通)。构成u相的上下臂的2个切换元件响应于pwm信号u的电平的变化互补地进行导通/切断的动作。
[0062]
pwm信号v是用于对构成v相的上下臂的2个切换元件进行驱动的pwm信号。该例子中,当pwm信号v为低电平时,v相的下臂的切换元件变为导通(v相的上臂的切换元件变为切断),当pwm信号v为高电平时,v相的下臂的切换元件变为切断(v相的上臂的切换元件变为导通)。构成v相的上下臂的2个切换元件响应于pwm信号v的电平的变化互补地进行导通/切断的动作。
[0063]
pwm信号w是用于对构成w相的上下臂的2个切换元件进行驱动的pwm信号。该例子中,当pwm信号w为低电平时,w相的下臂的切换元件变为导通(w相的上臂的切换元件变为切断),当pwm信号w为高电平时,w相的下臂的切换元件变为切断(w相的上臂的切换元件变为导通)。构成w相的上下臂的2个切换元件响应于pwm信号w的电平的变化互补地进行导通/切断的动作。
[0064]
需要说明的是,图2中,用于防止上下臂短路的死区时间的图示被进行了省略。此外,图2中还进行了如下定义,即,当pwm信号为高电平时,与该pwm信号对应的相的上臂为导通,当pwm信号为低电平时,与该pwm信号对应的相的下臂为导通。但是,考虑到电路的构成等,也可采用相反的方式对pwm信号的逻辑电平和各臂的导通/切断之间的关系进行定义。
[0065]
多个pwm信号u、v、w各自的1个周期tpwm相当于载波c的周期(载波频率的倒数)。变化点(t1~t6)表示pwm信号的逻辑电平进行过渡(转变/变化)的时点(时刻)(timing)。
[0066]
如图2所示,pwm信号生成部32可使用各相共用的1个载波c来生成各相的pwm信号。
由于将以相位tb为中心的左右对称的三角波作为了载波c,所以可对用于生成各相的pwm信号的波形的电路结构进行简化。载波c的计数器至相位ta为止进行倒计时(down count),从相位ta开始至相位tb为止进行正计时(up count),从相位tb开始进行倒计时。正计时期间和倒计时期间以这种方式进行重复。需要说明的是,pwm信号生成部32也可使用与各相分别对应的多个载波c来生成各相的pwm信号,还可采用其它公知的方法来生成各相的pwm信号。
[0067]
图2例示了将第1电流检测定时tm1设定于通电期间t21并将第2电流检测定时tm2设定于通电期间t22的情况。需要说明的是,用来设定第1电流检测定时tm1和第2电流检测定时tm2的通电期间并不限定于这些期间。
[0068]
在逆变器23正在输出被进行了pwm调制的3相交流的状态下,电流检测部27可根据与上臂up、vp、wp对应的通电模式来对特定(预定)相的电流进行检测。或者,在逆变器23正在输出被进行了pwm调制的3相交流的状态下,电流检测部27可根据与下臂un、vn、wn对应的通电模式来对特定相的电流进行检测。
[0069]
例如,如图2所示,在通电期间t21内,电流检测器24的两端所产生的电压的电压值与从马达4的u相端子流出的正的u相电流“ iu”的电流值对应。通电期间t21是从t4开始至t5为止的时间(期间)。通电期间t21相当于下臂un和上臂vp、wp为导通且剩下的3个臂为切断的状态的期间。为此,电流检测部27藉由在通电期间t21内的第1电流检测定时tm1获取检测信号sd,可对从马达4的u相端子流出的正的u相电流“ iu”的电流值进行检测。
[0070]
电流检测定时调整部34在从pwm信号中的1相转变为与其它2相不同的逻辑电平的时刻(例如,u相的pwm信号从与v相和w相相同的高电平转变到与v相和w相不同的低电平的时刻:t4)起经过了预定的延迟时间td时设定第1电流检测定时tm1。此时,电流检测定时调整部34在通电期间t21内设定第1电流检测定时tm1。
[0071]
此外,例如,如图2所示,在通电期间t22内,电流检测器24的两端所产生的电压的电压值与从马达4的w相端子流入的负的w相电流
“‑
iw”的电流值对应。通电期间t22是从t5开始至t6为止的时间(期间)。通电期间t22相当于下臂un、vn和上臂wp为导通且剩下的3个臂为断开的状态的期间。为此,电流检测部27通过在通电期间t22内的第2电流检测定时tm2获取检测信号sd,可对从马达4的w相端子流入的负的w相电流
“‑
iw”的电流值进行检测。
[0072]
电流检测定时调整部34在从pwm信号中的1相转变为与其它2相不同的逻辑电平的时刻(例如,藉由v相的pwm信号从与w相相同的高电平转变为与u相相同的低电平而导致w相变为与u相和v相不同的逻辑电平的时刻:t5)起经过了预定的延迟时间td时设定第2电流检测定时tm2。此时,电流检测定时调整部34在通电期间t22内设定第2电流检测定时tm2。
[0073]
同理,电流检测部27也可对其它相电流的电流值进行检测。
[0074]
如上所述,如果根据包含3相的pwm信号的通电模式依次对相电流iu、iv、iw中的2相的相电流进行检测和存储,则可分时(in a time division manner)检测3相的电流。由于3相的相电流的总和为零(iu iv iw=0),所以电流检测部27如果可检测到3相的相电流中的2相的相电流,也就可对余下的1相的相电流进行检测(计算)。
[0075]
图3是对通电时各臂的开关状态的一例进行表示的图。图4是对不通电时各臂的开关状态的一例进行表示的图。如图3所示,在上臂up和下臂vn、wn为导通且剩下的3个臂为切断的状态的通电期间内,电流检测部27可对从马达4的u相端子流入的负的u相电流
“‑
iu”的电流值进行检测。另一方面,如图4所示,在所有的上臂up、vp、wp都为导通且所有的下臂un、
vn、wn都为断开的状态下,电流不会流入电流检测器24,故电流检测部27无法对各相的相电流进行检测。在所有的上臂up、vp、wp都为切断且所有的下臂un、vn、wn都为导通的状态下,电流也不会流入电流检测器24,故电流检测部27也不能对各相的相电流进行检测。
[0076]
如上所述,在1分流电流检测方式中,如果不设定通电区间(通电期间),则无法检测各相的相电流。另外,在1分流电流检测方式中,1个通电期间内所能检测的相电流仅为1相,故需要在pwm信号的1个周期内至少设置2个通电期间(参见图2),并根据公式(iu iv iw=0)来对3相的相电流进行区分和检测。但是,如果为了对各相的相电流进行区分和检测而设置通电期间,则流入电流检测器24的电流会被放大,故当流入电流检测器24的电流为零时,电流检测部27无法分别测定各相的相电流的检测值中所含的检测误差。
[0077]
为此,存在如下情况,即,当马达处于停止状态时,将藉由基于占空比均为相同值的各相的pwm信号使逆变器23的所有臂中的一部分的臂导通而流入电流检测器24的各相的电流定义为偏移(offset)电流。此情况下,电流检测部27将藉由根据占空比均为相同值的各相的pwm信号使逆变器23的所有臂中的一部分的臂导通而流入电流检测器24的各相的偏移电流的电流值检测为偏移电流值(检测误差)。
[0078]
图5是对作为一例的藉由根据占空比均为50%的情况下的各相的pwm信号使逆变器23的所有臂中的一部分的臂导通而流入电流检测器24各相的偏移电流进行例示的时序图。图6是对当逆变器23根据哪一个的占空比都不为50%的各相的pwm信号使转子正在进行旋转时藉由使与图5相同的一部分的臂接通而流入电流检测器24的各相的相电流进行例示的时序图。
[0079]
图5中,在逆变器23使转子旋转之前(马达4启动之前),电流检测部27在pwm信号的每个周期内至少进行2次电流检测,藉此对3相的偏移电流的每个的电流值进行检测。电流检测部27将检测到的每个电流值作为3相的偏移电流值而保存在存储器中。图5例示了如下情况,即,电流检测部27对正的u相电流“iu”和负的w相电流
“‑
iw”的每个的偏移电流值进行检测,并根据这些检测结果对剩下的v相电流的偏移电流值进行检测(计算),然后将检测到的3相的偏移电流值保存在存储器中。3相的偏移电流值被保存至存储器后,马达4被逆变器23启动,逆变器23使转子进行旋转。
[0080]
图6中,当逆变器23根据哪一个的占空比都不为50%的各相的pwm信号正在使转子旋转时,电流检测部27在pwm信号的每个周期内均采用与图5相同的通电模式进行至少2次的电流检测,由此对3相的相电流的每个的电流值进行检测。在pwm信号的每个周期,电流检测部27都从按照pwm信号的每个周期而检测的3相的相电流的每个的电流值减去存储器中预先保存的3相的偏移电流值,藉此对3相的相电流iu、iv、iw各自的电流检测值进行计算。据此,可从3相的相电流iu、iv、iw各自的电流检测值中去除检测误差。根据检测误差被去除了的3相的相电流iu、iv、iw各自的电流检测值,pwm信号生成部32生成当逆变器23正在使转子旋转时的3相的pwm信号,由此可通过逆变器23高精度地对马达4的旋转进行控制。
[0081]
另外,即使在逆变器23不通过3相交流电流使转子进行旋转的状态下,转子也可能因风等的干扰而进行空转。尤其是,就使摩擦电阻较小的风扇等的旋转体进行旋转的转子而言,更容易发生空转。在逆变器23藉由3相交流电流使转子进行旋转之前,当转子正在进行空转时,如果此时对流入电流检测器24的电流进行检测,则空转期间内的转子中产生的再生制动会阻碍转子的旋转。空转期间内的转子的旋转受到阻害后,例如可能会发生马达4
的减速、异常噪音等的意外举动(行为)。
[0082]
图7示出了当对在逆变器使转子旋转之前流入电流检测器的电流的电流值进行检测时的pwm信号的波形的1个比较例,其中例示了各相的pwm信号的占空比均为50%的情况。藉由各相的pwm信号的波形可知,发生了再生电流进行流动的期间(再生区间)和再生电流不进行流动的期间(非再生区间)。图7所示的不通电区间相当于再生区间。在再生区间(不通电区间)内,所有的上臂或所有的下臂都处于导通状态。
[0083]
图8是在不通电区间内下臂都处于导通状态的情形的示意图,其中示出了图7的两侧的不通电区间内的开关状态。图9是在不通电区间内上臂都处于导通状态的情形的示意图,其中示出了由图7的两侧的不通电区间所夹着的中间的不通电区间内的开关状态。风等的外力使马达4的转子进行空转后,转子的空转会导致马达4的各相的线圈产生感应电压。藉由这些感应电压,如图8和图9所示,在图7所示的不通电区间内会发生从马达4至逆变器23的再生电流,由此空转期间内的转子可被进行再生制动。空转期间内的转子的旋转受到再生制动的阻碍后,例如可能会发生马达减速、异常噪音等的意外举动。
[0084]
《转子空转时的电流检测方法1》
[0085]
在本公开的“转子空转时的电流检测方法1”中,为了在不通电区间内不使再生电流流动,如图10所示,pwm信号生成部32生成用于将逆变器23的所有臂都设定为切断状态的各相的pwm信号。据此,即使转子进行了空转,由于在不通电区间内逆变器23的所有臂都变成了断开状态,所以理论上也不会发生从马达4流向逆变器23的再生电流。为此,可减轻由空转期间内的转子中产生的再生制动所引起的对转子旋转的阻碍,例如,可降低发生马达4的减速、异常噪音等的意外举动的可能性。
[0086]
图11是当对在逆变器使转子旋转之前流入电流检测器的电流的电流值进行检测时的pwm信号的波形的第1例的示意图。逆变器23通过对所有臂中的每个通电模式都不同的一部分的臂进行导通,可使具有转子的马达4通电。pwm信号生成部32生成在1个周期内包括“在转子的空转期间内使所有臂都切断的第1期间”、“在转子的空转期间以第1通电模式使一部分的臂导通的第2期间”、及“在转子的空转期间内以第2通电模式使一部分的臂导通的第3期间”的各相的pwm信号。据此,可获得如图11所示的各臂的开关状态。
[0087]
在图11所示的例子中,所有臂都变成了处于切断状态的不通电区间t1是第1期间的一例,一部分的臂在第1通电模式下变成了处于导通状态的电流检测区间的前半区间t2为第2期间的一例,一部分的臂在第2通电模式下变成了处于导通状态的电流检测区间的后半区间t3为第3期间的一例。
[0088]
在电流检测区间的前半区间t2(第2期间的一例)内,由于下臂un和上臂vp、wp在第1通电模式下变成了处于导通状态,所以从马达4的u相端子流出的正的u相电流“ iu”可流入电流检测器24。在电流检测区间的后半区间t3(第3期间的一例)内,由于下臂un、vn和上臂wp在第2通电模式下变成了处于导通状态,所以从马达4的w相端子流入的负的w相电流
“‑
iw”可流入电流检测器24。据此,电流检测部27可对在前半区间t2内流入电流检测器24的第1基准电流(该例子中为正的u相电流“ iu”)和在后半区间t3内流入电流检测器24的第2基准电流(该例子中为负的w相电流
“‑
iw”)进行检测。
[0089]
如上所述,根据电流检测方法1,由于在不通电区间t1内所有臂都处于切断状态,所以可对能够产生再生制动的不必要的转矩的发生进行抑制。为此,在逆变器23藉由3相交
流电流使转子旋转之前,当转子进行空转时,即使此时电流检测部27在电流检测区间内对流入电流检测器24的电流进行检测,由于存在所有臂都处于切断状态的不通电区间t1,所以转子的空转也难以受到阻碍。
[0090]
在图11所示的例子中,第2期间和第3期间的合计期间的一例即电流检测区间被设定为短于第1期间的一例即不通电区间。在不通电区间内,由于再生制动状态被进行了切断,所以可对能够产生再生制动的不必要的转矩的发生进行抑制。另一方面,由于电流检测区间短于不通电区间,所以在电流检测区间中的通电时间(期间)内仅能流动微小的电流。为此,在逆变器23藉由3相交流电流使转子旋转之前,当转子进行空转时,即使此时电流检测部27在电流检测区间内对流入电流检测器24的电流进行检测,也可减轻空转期间内的转子旋转受到阻碍。其结果为,例如能够对马达4的减速、异常噪音等的意外举动的发生进行抑制。
[0091]
例如,电流检测部27可根据在第2期间内检测到的第1相的第1基准电流对逆变器23正在使转子旋转时流入电流检测器24的第1相的相电流进行校正。同样,电流检测部27也可根据在第2期间内检测到的第2相的第2基准电流对逆变器23正在使转子旋转时流入电流检测器24的第2相的相电流进行校正。例如,第1相为u相,第2相为w相,但也可为其它组合。由于在1个周期中的第1期间内电流不会流入电流检测器24,所以可将第2期间内流入电流检测器24的第1基准电流和第3期间内流入电流检测器24的第2基准电流视为上述偏移电流那样的2相的基准电流。
[0092]
电流检测部27例如可根据第2期间内检测到的第1相的第1基准电流和第3期间内检测到的第2相的第2基准电流,并利用3相的相电流的总和为零的公式,来检测(计算)在转子的空转期间内流入电流检测器24的第3相的第3基准电流。第3相的第3基准电流也可被视为上述偏移电流那样的1相的基准电流。第3相例如为v相。电流检测部27可根据所检测(计算)到的第3相的第3基准电流对逆变器23正在使转子旋转时流入电流检测器24的第3相的相电流进行校正。
[0093]
例如,将第1相的第1基准电流的值作为第1基准电流值,将第2相的第2基准电流的值作为第2基准电流值,并将第3相的第3基准电流的值作为第3基准电流值。电流检测部27在第2期间内检测第1基准电流值,在第3期间内检测第2基准电流值,并根据这些检测结果检测(计算)余下的第3基准电流值,然后将检测到的3相的基准电流值保存在存储器中。3相的基准电流值被保存至存储器之后,马达4被逆变器23启动,逆变器23使转子旋转。
[0094]
当逆变器23正在使转子旋转时,电流检测部27按照pwm信号的每个周期,以与图11相同的通电模式至少进行2次电流检测,由此对3相的相电流的每个的电流值进行检测。电流检测部27按照pwm信号的每个周期从依照pwm信号的每个周期而检测的3相的相电流的每个的电流值中减去存储器内预先保存的3相的基准电流值,藉此可对3相的相电流iu、iv、iw各自的电流检测值进行计算。据此,电流检测部27可根据各相的基准电流对当逆变器23正在使转子旋转时流入电流检测器24的各相的相电流进行校正,这样就可从3相的相电流iu、iv、iw各自的电流检测值中去除检测误差。pwm信号生成部32使用检测误差被去除了的校正后的3相的相电流iu、iv、iw各自的电流检测值来生成当逆变器23正在使转子旋转时的3相的pwm信号,由此可通过逆变器23高精度地控制马达4的旋转。
[0095]
需要说明的是,作为上述以外的方法,例如还可不使用pwm功能而是仅使用通用端
口功能来从端口输出导通/切断信号,藉此生成图10的状态。
[0096]
《转子空转时的电流检测方法2》
[0097]
接着,对本公开的“转子空转时的电流检测方法2”进行说明。
[0098]
图12是表示作为一例的藉由基于占空比均为50%的各相的pwm信号使逆变器的所有臂中的一部分的臂导通而流入电流检测器24的u相电流的电流波形的一例的放大图。图12中,上面的波形表示转子停止时的波形,下面的波形表示转子空转时的波形。图12例示了pwm信号的大约16个周期的波形。两个波形几乎没有变化地上下偏移(错位),该上下偏移是由于转子的空转而在马达4的各相的线圈中产生的感应电压所引起的。
[0099]
图13是当对在逆变器使转子旋转之前流入电流检测器24的电流的电流值进行检测时的pwm信号的波形的第2例的示意图。逆变器23通过对所有臂中的每个通电模式都不同的一部分的臂进行导通,使具有转子的马达4通电。pwm信号生成部32藉由均为相同值的占空比生成具有第1周期区间的各相的pwm信号,该第1周期区包括在转子的空转期间内以第1通电模式使一部分的臂导通的第1区间、在转子的空转期间内以第2通电模式使一部分的臂导通的第2区间、及在转子的空转期间内以第3通电模式使所有的上臂或所有的下臂导通的第3区间。据此,可获得图13所示那样的各臂的开关状态。
[0100]
在图13所示的例子中,一部分的臂在第1通电模式下变成了处于导通状态的第1电流检测区间p1(包含第1次检测定时的期间)是第1区间的一例,一部分的臂在第2通电模式下变成了处于导通状态的第2电流检测区间p2(包含第2次检测定时的期间)是第2区间的一例。所有的上臂处于导通状态且所有的下臂处于切断状态的不通电区间p3是第3区间的一例。该例子中,第3区间位于第1区间和第2区间之间。
[0101]
在第1电流检测区间p1(第1区间的一例)内,上臂up和下臂vn、wn在第1通电模式下变成了处于导通状态,故从马达4的u相端子流入的负的u相电流
“‑
iu”可流入电流检测器24(参见图14)。在第2电流检测区间p2(第2区间的一例)内,下臂un和上臂vp、wp在第2通电模式下变成了处于导通状态,故从马达4的u相端子流出的正的u相电流“ iu”可流入电流检测器24(参见图15)。据此,电流检测部27可对在第1区间内流入电流检测器24的第1相的第1电流值和在第2区间内流入电流检测器24的第1相的第2电流值进行检测。该例子中,第1电流值为负的u相电流
“‑
iu(=iv iw)”的电流值,第2电流值为正的u相电流“ iu”的电流值。
[0102]
在电流检测方法2中,电流检测部27利用在pwm信号的1个周期内所检测的第1相的相电流为成对(pair)的情况,将第1相的第1电流值和第1相的第2电流值之和的一半与零之间的差分检测为感应电压的影响量。之后,电流检测部27从在第1次或第2次的检测定时所检测到的第1电流值或第2电流值减去所检测到的感应电压的影响量,由此可计算第1相的偏移电流值。此外,对于第1相之外的第2相或第3相,电流检测部27藉由采用相同的方法,即使在转子的空转期间内也可同样地计算偏移电流值。
[0103]
图16是表示转子空转时的pwm信号的10个周期(例如,400μs)内的u相偏移电流值的计算处理的一例的波形图。图17是图16所示的由虚线框包围的部分的放大图,其为表示转子空转时的pwm信号的1个周期(例如,40μs)内的u相偏移电流值的计算处理的一例的波形图。u相是第1相的一例。
[0104]
电流检测部27通过计算第1区间的第1次检测时流入电流检测器24的u相的第1电流值(-iu e)和第2区间的第2次检测时流入电流检测器24的u相的第2电流值(iu e)之和的
一半,可导出感应电压的影响分量e。在图16和图17所示的例子中,电流检测部27通过从第2次检测的u相的第2电流值(iu e)中减去影响分量e,可计算出u相偏移电流值iu。
[0105]
如上所述,根据电流检测方法2,能够在pwm信号的1个周期的时间(期间)内计算出u相偏移电流值。换言之,即使在转子的空转期间内也可短时间(迅速)地计算u相偏移电流值,故转子的空转难以受到阻碍。其结果为,例如可对马达4的减速、异常噪音等的意外举动的发生进行抑制。
[0106]
图18是表示u相偏移电流值的计算处理的一例的波形图。图19是表示w相偏移电流值的计算处理的一例的波形图。如图19所示,就w相偏移电流值(或v相偏移电流值)而言,也与u相偏移电流值同样对其进行计算。
[0107]
图18例示了pwm信号生成部32藉由均为50%的占空比生成具有第1周期区间的各相的pwm信号的情形。pwm信号生成部32生成具有第1周期区间的各相的pwm信号,该第1周期区间包括用于使一部分的臂在转子的空转期间以第1通电模式进行导通的第1区间q1、用于使一部分的臂在转子的空转期间内以第2通电模式进行导通的第2区间q2、及用于使所有的上臂或所有的下臂在转子的空转期间内以第3通电模式进行导通的第3区间q3。在图18所示的例子中,第1周期区间包括包含第1次检测定时的第1区间q1、包括第2次检测定时的第2区间q2、及使所有的上臂都进行导通的第3区间q3。电流检测部27从第1区间q1内流入电流检测器24的第1相的第1电流值或第2区间q2内流入电流检测器24的第1相的第2电流值减去第1电流值和第2电流值之和的一半。该例子中,电流检测部27通过进行从第2电流值中减去的运算,可计算出第1相的偏移电流值。图18例示了第1相为u相的情况。
[0108]
图19例示了pwm信号生成部32藉由均为50%的占空比生成具有第2周期区间的各相的pwm信号的情形。pwm信号生成部32生成具有第2周期区间的各相的pwm信号,该第2周期区间包括使一部分的臂在转子的空转期间内以第4通电模式进行导通的第4区间q4、使一部分的臂在转子的空转期间内以第5通电模式进行导通的第5区间q5、及使所有的上臂或所有的下臂在转子的空转期间内以第6通电模式进行导通的第6区间q6。在图19所示的例子中,第2周期区间包括包含第1次检测定时的第4区间q4、包含第2次检测定时的第5区间q5、及使所有的上臂都进行导通的第6区间q6。电流检测部27从第4区间q4内流入电流检测器24的第2相的第3电流值或第5区间q5内流入电流检测器24的第2相的第4电流值减去第3电流值和第4电流值之和的一半。该例子中,电流检测部27通过进行从第4电流值中减去的运算,可计算出第2相的偏移电流值。图19例示了第2相为w相的情况。需要说明的是,第2周期区间可为与第1周期区间相邻的区间,也可为与第1周期区之间夹着一或多个周期区间的区间,还可为与第1周期区间相同的区间。
[0109]
例如,电流检测部27可根据第1相的偏移电流值对当逆变器23正在使转子旋转时流入电流检测器24的第1相的相电流的电流值进行校正。同样,电流检测部27可根据第2相的偏移电流值对当逆变器23正在使转子旋转时流入电流检测器24的第2相的相电流的电流值进行校正。例如,第1相为u相,第2相为w相,但也可为其它组合。
[0110]
电流检测部27例如可根据第1相的偏移电流值和第2相的偏移电流值并利用3相的相电流的总和为零的公式来对第3相的偏移电流值进行检测(计算)。第3相例如为v相。电流检测部27可根据所检测(计算)到的第3相的偏移电流值对当逆变器23正在使转子旋转时流入电流检测器24的第3相的相电流进行校正。
[0111]
例如,电流检测部27计算第1相的偏移电流值,并计算第2相的偏移电流值,再根据这些运算结果计算余下的第3相的偏移电流值,然后将计算出的3相的偏移电流值保存在存储器中。3相的偏移电流值被保存至存储器之后,马达4被逆变器23启动,逆变器23使转子进行旋转。
[0112]
当逆变器23正在使转子旋转时,电流检测部27执行至少2次电流检测,以对3相的相电流的每个的电流值进行检测。电流检测部27按照pwm信号的每个周期从依照pwm信号的每个周期而检测的3相的相电流各自的电流值减去存储器中预先保存的3相的偏移电流值,由此计算3相的相电流iu、iv、iw的每个的电流检测值。据此,电流检测部27可根据各相的偏移电流值对当逆变器23正在使转子旋转时流入电流检测器24的各相的相电流进行校正,故可从3相的相电流iu、iv、iw各自的电流检测值中去除检测误差。pwm信号生成部32通过使用检测误差被去除了的校正后的3相的相电流iu、iv、iw各自的电流检测值来生成当逆变器23正在使转子旋转时的3相的pwm信号,可藉由逆变器23高精度地控制马达4的旋转。
[0113]
需要说明的是,就电流检测部27、通电模式生成部35、电流检测定时调整部34及初始位置推测部38的各功能而言,由可读取地存储在未图示的存储装置中的程序使cpu(central processing unit)进行运行而实现。例如,这些功能由包含cpu的微机中的硬件和软件的协作而实现。
[0114]
上面通过实施方式对马达控制装置、马达系统及马达控制方法进行了说明,但本发明并不限定于上述实施方式,只要不脱离权利要求书记载的技术范围,还可对上述实施方式进行各种各样的变形和改良。
[0115]
例如,就输出与流入逆变器的直流侧的电流的电流值对应的检测信号的电流检测器而言,也可为输出与流入正母线(正侧母线)的电流的电流值对应的检测信号的电流检测器。另外,电流检测器还可为ct(current transformer)等的传感器。
[0116]
本国际申请主张基于2020年3月31日申请的日本国专利申请第2020-064148号的优先权,并将日本国专利申请第2020-064148号的内容全部援引于本国际申请。
[0117]
附图标记说明:
[0118]
1-1
ꢀꢀꢀ
马达系统
[0119]4ꢀꢀꢀꢀꢀ
马达
[0120]
21
ꢀꢀꢀꢀ
直流电源
[0121]
22a
ꢀꢀꢀ
正侧母线
[0122]
22b
ꢀꢀꢀ
负侧母线
[0123]
23
ꢀꢀꢀꢀ
逆变器
[0124]
24
ꢀꢀꢀꢀ
电流检测器
[0125]
27
ꢀꢀꢀꢀ
电流检测部
[0126]
30
ꢀꢀꢀꢀ
矢量控制部
[0127]
32
ꢀꢀꢀꢀ
pwm信号生成部
[0128]
33
ꢀꢀꢀꢀ
驱动电路
[0129]
34
ꢀꢀꢀꢀ
电流检测定时调整部
[0130]
35
ꢀꢀꢀꢀ
通电模式生成部
[0131]
36
ꢀꢀꢀꢀ
时钟信号生成部
[0132]
37
ꢀꢀꢀ
载波生成部
[0133]
38
ꢀꢀꢀꢀ
初始位置推测部
[0134]
100-1
ꢀꢀꢀꢀ
马达控制装置
[0135]
up、vp、wp、un、vn、wn
ꢀꢀ
臂。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。