1.本发明涉及雷达信号处理的技术领域,具体涉及一种投影矩阵预处理的主瓣干扰抑制方法。
背景技术:
2.自适应波束成形技术广泛应用于雷达,通信和声纳中。自适应波束形成方法在干扰处于旁瓣区域时能展现出较好的特性。但在干扰处于主瓣区域内时,常规宽带阵列自适应波束形成算法存在主波束波峰偏移,方向图旁瓣过高和波束畸变,极大地影响了算法性能。
3.近年来大量文献和研究表明,基于阻塞矩阵(bmp)以及特征投影矩阵预(emp)处理的方法运用到宽带阵列中,可以有效地从频域上抑制主瓣干扰,但是仍然很难达到准确的主瓣保形以及主瓣偏移目的,所以在加强主瓣干扰和旁瓣干扰的抑制的前提下实现主瓣保形主瓣不偏移越来越重要。
4.李帅等人在其发表的论文“宽带恒定波束形成的主瓣干扰抑制方法”(2016(06):21-24.doi:10.19297/j.cnki.41-1228/tj.2016.06.005.)中公开了一种恒定波束成形抑制主瓣干扰的方法。该方法能保证方向图主瓣宽度不变,同时能有效地抑制主瓣干扰。但是不能抑制旁瓣干扰,并且引入二阶锥规划获得权系数从而加重运算负担。
5.国防科技大学的胡海涛在其发表的论文“雷达抗主瓣干扰算法研究”(2019.doi:10.27052/d.cnki.gzjgu.2019.000710.)中提出了以emp算法为基础对协方差矩阵重构的方法。步骤一先求得接收信号的协方差矩阵对其进行特征值分解并构造特征投影矩阵。步骤二对接收到的信号进行特征投影矩阵预处理。步骤三对预处理后的信号进行协方差矩阵的重构。最后进行自适应波束形成。但是整个算法对特征向量与导向矢量相关性的标量参数的选取存在局限性,会使最后得到的波束发生偏移。
技术实现要素:
6.鉴于现有技术的不足,本发明旨在于提供一种投影矩阵预处理的主瓣干扰抑制方法,通过本发明的方法降低运算量,确保方向图中主瓣方向正确的同时降低副瓣电平。
7.为了实现上述目的,本发明采用的技术方案如下:
8.一种投影矩阵预处理的主瓣干扰抑制方法,所述方法包括以下步骤:
9.s1对接收信号模型采用泰勒估计方法获得精度更高的协方差矩阵;
10.s2对接收信号的协方差矩阵进行特征值分解;
11.s3根据分解后的特征值和特征向量构造特征投影矩阵,并对接收信号进行特征投影预处理;
12.s4利用稀疏重构法对协方差矩阵进行重构;
13.s5在主瓣范围内权矢量投影不变为前提求得信号的最优权向量;最后把预处理后的信号和权值相乘得到最终结果。
14.需要说明的是,所述步骤s1中的精度更高的协方差矩阵为:
[0015][0016]
其中,为接收信号的协方差矩阵,a矩阵为导向矢量a(θi)组成的矩阵。a=[a(θ1),
…
,a(θm)],m为主瓣和旁瓣干扰数之和;并针对主瓣内一个干扰的抑制,hi为第i个干扰的功率,为噪声功率。
[0017]
需要说明的是,所述步骤s2中对精度更高的协方差矩阵进行分解后所得:
[0018][0019]
其中,λi为的特征值,i=1,2,...m。ui为第i个特征值对应的特征向量。λg为干扰子空间ug特征值对角矩阵,λn为噪声子空间un特征值对角矩阵,p为阵元数。
[0020]
需要说明的是,所述步骤s3中,假设um为主瓣干扰对应的特征矢量,特征投影矩阵
[0021][0022]
其中,i为单位矩阵,|u
mh
a(θ0)|2≥ρ|a(θ0)|2,ρ为限制特征向量与导向矢量相关性的标量参数;满足上式的um即为主瓣干扰对应的特征矢量,否则就是旁瓣干扰的特征矢量;
[0023]
特征投影矩阵对原信号x(k)进行预处理,处理后信号:
[0024]
x2(k)=bx(k)
[0025]
将上述处理后的信号通过步骤s4进行重构。
[0026]
需要说明的是,所述步骤s4中对步骤s3的协方差矩阵进行重构,具体为:由步骤s3的x2(k)可知
[0027][0028]
对ry进行特征值分解得到:
[0029][0030]
其中,λi为ry的特征值,i=1,2,...m,且λ1≥λ2≥
…
λ
i-1
,ui为第i个特征值对应的特征向量;
[0031]
在特征值λi中选取噪声对应的特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
,d为噪声对应的特征值个数,表达式:
[0032][0033]
根据噪声对应特征值个数d,计算噪声特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
的平均值
[0034][0035]
用噪声均值对噪声特征值进行修正,令噪声特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
均等于噪声均值得到修正后的信号协方差矩阵的表达式:
[0036][0037]
其中,为修正后的特征值所组成的对角矩阵,u为特征向量矩阵,y=[y1,y2,
…yp-1
]。
[0038]
需要说明的是,所述步骤s5包括:
[0039]
s5.1在主瓣子空间投影不变为约束条件下计算最小方差准则下的最优权矢量w,根据公式:
[0040]
h=∫
φ
a(θ)a(θ)hdθ
[0041][0042]
确定主瓣区域子空间,主瓣区域子空间即为u1的列向量张成。ωi为第i个特征值,vi为对应的特征向量,λ1为前k2个特征值构成的对角阵,u1为λ1中特征值对应的特征向量构成的矩阵,λ2由p-k2个特征值组成,u2为λ2中特征值对应的特征向量构成的矩阵;
[0043]
根据上述主瓣子空间u1构造主瓣子空间投影矩阵e;
[0044]
e=u(uhu)-1
uh[0045]
以权矢量在主瓣子空间的投影不变为约束条件,根据步骤四得到的修正后信号协方差矩阵计算最小方差条件下的最优权向量
[0046][0047]
其中a(θ)为期望方向θ的导向矢量
[0048]
最后求解公式:
[0049][0050]
s5.2信号加权
[0051]
由步骤s3得到的预处理后的信号和步骤s5.1得到的权值进行相乘:
[0052]
z=whx=whbx。
[0053]
本发明有益效果在于:
[0054]
1、相较于传统宽带恒定束宽束主瓣抑制方法,本发明由于在最优权值求解过程中不需要进行协方差矩阵求逆来避免二阶锥规划这类最优化问题,从而有效缩短运算时间并显着提高计算效率;
[0055]
2、相较于以emp算法抑制主瓣干扰方法,本发明因权矢量投影衡定于主瓣子空间中,既能达到主瓣保形又能确保主瓣峰值方向正确且主瓣宽度不变。
附图说明
[0056]
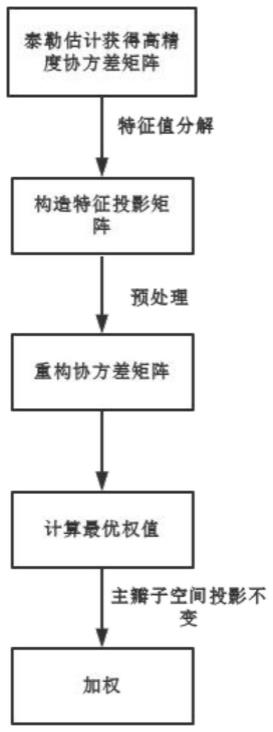
图1是本发明的实现流程图;
[0057]
图2是主瓣干扰在2
°
时,本发明和传统宽带恒定波束主瓣抑制方法对比图;
[0058]
图3是主瓣干扰在2
°
时,本发明和以emp算法抑制主瓣干扰方法对比图。
具体实施方式
[0059]
下将结合附图对本发明作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
[0060]
如图1所示,本发明为一种投影矩阵预处理的主瓣干扰抑制方法,所述方法包括以下步骤:
[0061]
s1对接收信号模型采用泰勒估计方法获得精度更高的协方差矩阵;
[0062]
s2对接收信号的协方差矩阵进行特征值分解;
[0063]
s3根据分解后的特征值和特征向量构造特征投影矩阵,并对接收信号进行特征投影预处理;
[0064]
s4利用稀疏重构法对协方差矩阵进行重构;
[0065]
s5在主瓣范围内权矢量投影不变为前提求得信号的最优权向量;最后把预处理后的信号和权值相乘得到最终结果。
[0066]
需要说明的是,所述步骤s1中的精度更高的协方差矩阵为:
[0067][0068]
其中,为接收信号的协方差矩阵,a矩阵为导向矢量a(θi)组成的矩阵。a=[a(θ1),
…
,a(θm)],m为主瓣和旁瓣干扰数之和;并针对主瓣内一个干扰的抑制,hi为第i个干扰的功率,为噪声功率。
[0069]
需要说明的是,所述步骤s2中对精度更高的协方差矩阵进行分解后所得:
[0070][0071]
其中,λi为的特征值,i=1,2,...m。ui为第i个特征值对应的特征向量。λg为干扰子空间ug特征值对角矩阵,λn为噪声子空间un特征值对角矩阵,p为阵元数。
[0072]
需要说明的是,所述步骤s3中,假设um为主瓣干扰对应的特征矢量,特征投影矩阵
[0073][0074]
其中,i为单位矩阵,|u
mh
a(θ0)|2≥ρ|a(θ0)|2,ρ为限制特征向量与导向矢量相关性的标量参数;满足上式的um即为主瓣干扰对应的特征矢量,否则就是旁瓣干扰的特征矢量;
[0075]
特征投影矩阵对原信号x(k)进行预处理,处理后信号:
[0076]
x2(k)=bx(k)
[0077]
将上述处理后的信号通过步骤s4进行重构。
[0078]
需要说明的是,所述步骤s4中对步骤s3的协方差矩阵进行重构,具体为:由步骤s3的x2(k)可知
[0079][0080]
对ry进行特征值分解得到:
[0081]
[0082]
其中,λi为ry的特征值,i=1,2,...m,且λ1≥λ2≥
…
λ
i-1
,ui为第i个特征值对应的特征向量;
[0083]
在特征值λi中选取噪声对应的特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
,d为噪声对应的特征值个数,表达式:
[0084][0085]
根据噪声对应特征值个数d,计算噪声特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
的平均值
[0086][0087]
用噪声均值对噪声特征值进行修正,令噪声特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
均等于噪声均值得到修正后的信号协方差矩阵的表达式:
[0088][0089]
其中,为修正后的特征值所组成的对角矩阵,u为特征向量矩阵,y=[y1,y2,
…yp-1
]。
[0090]
需要说明的是,所述步骤s5包括:
[0091]
s5.1在主瓣子空间投影不变为约束条件下计算最小方差准则下的最优权矢量w,根据公式:
[0092]
h=∫
φ
a(θ)a(θ)hdθ
[0093][0094]
确定主瓣区域子空间,主瓣区域子空间即为u1的列向量张成。ωi为第i个特征值,vi为对应的特征向量,λ1为前k2个特征值构成的对角阵,u1为λ1中特征值对应的特征向量构成的矩阵,λ2由p-k2个特征值组成,u2为λ2中特征值对应的特征向量构成的矩阵;
[0095]
根据上述主瓣子空间u1构造主瓣子空间投影矩阵e;
[0096]
e=u(uhu)-1
uh[0097]
以权矢量在主瓣子空间的投影不变为约束条件,根据步骤四得到的修正后信号协方差矩阵计算最小方差条件下的最优权向量
[0098][0099]
其中a(θ)为期望方向θ的导向矢量
[0100]
最后求解公式:
[0101][0102]
s5.2信号加权
[0103]
由步骤s3得到的预处理后的信号和步骤s5.1得到的权值进行相乘:
[0104]
z=whx=whbx。
[0105]
实施例
[0106]
为使本发明的目的、技术方案和优点表述更加清楚,将通过以下仿真试验进行验证。
[0107]
仿真参数,如表1所示:
[0108]
参数参数值参数参数值阵元个数16信噪比0db阵元间距半波长采样频率120mhz波束指向0
°
干燥比60db中心频率1ghz主瓣干扰方向2
°
带宽50mhz脉冲重复周期数200us脉宽50us驻留周期个数5目标方向0
°
噪声类型高斯白噪声
[0109]
仿真内容
[0110]
仿真1:在表1仿真条件下,对比本发明与宽带恒定波束形成的主瓣抑制方法的天线方向图,结果如图2所示。
[0111]
图2中蓝线表示宽带恒定波束形成的主瓣抑制方法得到的天线方向图,红色线表示本发明得到的天线方向图。由图2可知,本发明的天线方向图对于副瓣电平是有明显抑制效果,基本维持在10db以上。在运算量上由于本发明不需矩阵求逆,使得计算时间也大大减少。原技术运算时间9.193秒,本发明运算时间0.368824秒。
[0112]
仿真2:在表1仿真条件下,对比本发明与以emp算法为基础的主瓣抑制方法的天线方向图,结果如图3所示。
[0113]
图3虚线表示以emp算法为基础的主瓣抑制方法得到的天线方向图,红色表示本发明得到的天线方向图。以emp算法为基础的主瓣干扰抑制的主瓣大致偏离3
°
左右。本发明的主瓣指向符合仿真条件,优化了10db左右的在旁瓣电平抑制。原算法虽然也使用了投影矩阵预处理,但是本发明在权值的约束条件上使用了以权矢量在主瓣子空间投影不变。使得最终我们的主瓣形状没有发生畸形,并且指向更准确。
[0114]
对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及变形,而所有的这些改变以及变形都应该属于本发明权利要求的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。