技术特征:
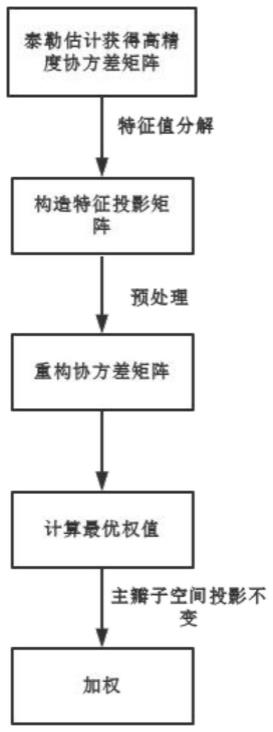
1.一种投影矩阵预处理的主瓣干扰抑制方法,其特征在于,所述方法包括以下步骤:s1对接收信号模型采用泰勒估计方法获得精度更高的协方差矩阵;s2对接收信号的协方差矩阵进行特征值分解;s3根据分解后的特征值和特征向量构造特征投影矩阵,并对接收信号进行特征投影预处理;s4利用稀疏重构法对协方差矩阵进行重构;s5在主瓣范围内权矢量投影不变为前提求得信号的最优权向量;最后把预处理后的信号和权值相乘得到最终结果。2.根据权利要求1所述的投影矩阵预处理的主瓣干扰抑制方法,其特征在于,所述步骤s1中的精度更高的协方差矩阵为:其中,为接收信号的协方差矩阵,a矩阵为导向矢量a(θ
i
)组成的矩阵。a=[a(θ1),
…
,a(θ
m
)],m为主瓣和旁瓣干扰数之和;并针对主瓣内一个干扰的抑制,h
i
为第i个干扰的功率,为噪声功率。3.根据权利要求1或2所述的投影矩阵预处理的主瓣干扰抑制方法,其特征在于,所述步骤s2中对精度更高的协方差矩阵进行分解后所得:其中,λ
i
为的特征值,i=1,2,...m。u
i
为第i个特征值对应的特征向量。λ
g
为干扰子空间u
g
特征值对角矩阵,λ
n
为噪声子空间u
n
特征值对角矩阵,p为阵元数。4.根据权利要求1所述的投影矩阵预处理的主瓣干扰抑制方法,其特征在于,所述步骤s3中,假设u
m
为主瓣干扰对应的特征矢量,特征投影矩阵其中,i为单位矩阵,|u
mh
a(θ0)|2≥ρ|a(θ0)|2,ρ为限制特征向量与导向矢量相关性的标量参数;满足上式的u
m
即为主瓣干扰对应的特征矢量,否则就是旁瓣干扰的特征矢量;特征投影矩阵对原信号x(k)进行预处理,处理后信号:x2(k)=bx(k)将上述处理后的信号通过步骤s4进行重构。5.根据权利要求4所述的投影矩阵预处理的主瓣干扰抑制方法,其特征在于,所述步骤s4中对步骤s3的协方差矩阵进行重构,具体为:由步骤s3的x2(k)可知对r
y
进行特征值分解得到:其中,λ
i
为r
y
的特征值,i=1,2,...m,且λ1≥λ2≥
…
λ
i-1
,u
i
为第i个特征值对应的特征向量;
在特征值λ
i
中选取噪声对应的特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
,d为噪声对应的特征值个数,表达式:根据噪声对应特征值个数d,计算噪声特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
的平均值的平均值用噪声均值对噪声特征值进行修正,令噪声特征值λ
i-d
、λ
i-d 1
、
…
λ
i-1
均等于噪声均值得到修正后的信号协方差矩阵的表达式:其中,为修正后的特征值所组成的对角矩阵,u为特征向量矩阵,y=[y1,y2,
…
y
p-1
]。6.根据权利要求4所述的投影矩阵预处理的主瓣干扰抑制方法,其特征在于,所述步骤s5包括:s5.1在主瓣子空间投影不变为约束条件下计算最小方差准则下的最优权矢量w,根据公式:h=∫
φ
a(θ)a(θ)
h
dθ确定主瓣区域子空间,主瓣区域子空间即为u1的列向量张成。ω
i
为第i个特征值,v
i
为对应的特征向量,λ1为前k2个特征值构成的对角阵,u1为λ1中特征值对应的特征向量构成的矩阵,λ2由p-k2个特征值组成,u2为λ2中特征值对应的特征向量构成的矩阵;根据上述主瓣子空间u1构造主瓣子空间投影矩阵e;e=u(u
h
u)-1
u
h
以权矢量在主瓣子空间的投影不变为约束条件,根据步骤四得到的修正后信号协方差矩阵计算最小方差条件下的最优权向量其中a(θ)为期望方向θ的导向矢量最后求解公式:s5.2信号加权由步骤s3得到的预处理后的信号和步骤s5.1得到的权值进行相乘:
z=w
h
x=w
h
bx。
技术总结
本发明公开了一种投影矩阵预处理的主瓣干扰抑制方法,所述方法包括以下步骤:对接收信号模型采用泰勒估计方法获得精度更高的协方差矩阵;对接收信号的协方差矩阵进行特征值分解;根据分解后的特征值和特征向量构造特征投影矩阵,并对接收信号进行特征投影预处理;利用稀疏重构法对协方差矩阵进行重构;在主瓣范围内权矢量投影不变为前提求得信号的最优权向量;最后把预处理后的信号和权值相乘得到最终结果。最终结果。最终结果。
技术研发人员:罗丰 尹应增 赵峰锋 张林让 廖桂生 张宇航 王映中 赵新雅
受保护的技术使用者:西安电子科技大学杭州研究院
技术研发日:2022.08.31
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。