技术特征:
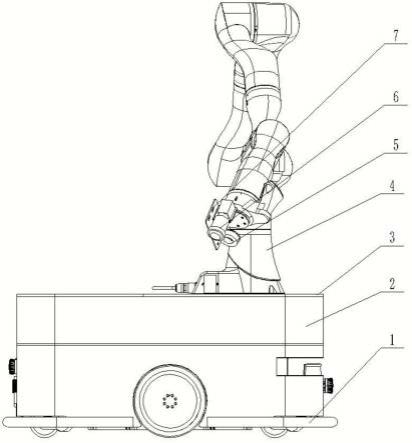
1.智能移动协作机器人,其特征在于,包括:agv小车(1),能够进行移动;电源部分,设置在agv小车(1)内部,电源部分用于为装置整体提供电能;协作机器人(4),通过连接箱体(2)设置在agv小车(1)上方;工业相机(6),设置在协作机器人(4)上,用于在协作机器人带动下在空间内移动并对检测点位的拍摄;上位机(9),与agv小车(1)分体设置,所述上位机(9)用于对agv小车(1)的地图轨迹进行规划,接收agv小车(1)上报信息,将处理后上报信息发布给协作机器人(4)并控制协作机器人(4)动作,采集工业相机(6)的拍摄信息;无线ap组网(8);所述agv小车(1)通过无线ap组网与上位机(9)交互连接;所述协作机器人(4)的受控端通过无线ap组网连接于上位机(9)的输出端;所述工业相机(6)的输出端通过无线ap组网连接于上位机(9)的输入端。2.根据权利要求1所述的智能移动协作机器人,其特征在于,所述agv小车(1)通过无线ap组网释放的wifi接入到网内,工业相机(6)、协作机器人(4)、上位机(9)分别通过网线连接到无线ap组网的lan口。3.根据权利要求1所述的智能移动协作机器人,其特征在于,还包括能够对协作机器人(4)进行操控的操控手柄。4.根据权利要求3所述的智能移动协作机器人,其特征在于,所述连接箱体(2)的整体为钣金结构,连接箱体(2)的内部设置两个支撑梁,支撑梁上固定连接有对协作机器人(4)进行定位的协作机器人安装板(22)。5.根据权利要求4所述的智能移动协作机器人,其特征在于,所述连接箱体(2)的内部配置对操控手柄进行存储的存储隔间(21)。6.根据权利要求1所述的智能移动协作机器人,其特征在于,所述工业相机(6)上设置有能够进行角度调节的光圈(5)。
技术总结
本实用新型公开了一种智能移动协作机器人,包括:AGV小车,能够进行移动;电源部分,设置在AGV小车内部;协作机器人,设置在AGV小车上方;工业相机,设置在协作机器人上;上位机,与AGV小车分体设置,所述上位机用于对AGV小车的地图轨迹进行规划,接收AGV小车上报信息,将处理后上报信息发布给协作机器人并控制协作机器人动作,采集工业相机的拍摄信息;无线AP组网,AGV小车通过无线AP组网与上位机交互连接;协作机器人的受控端通过无线AP组网连接于上位机的输出端;工业相机的输出端通过无线AP组网连接于上位机的输入端。本实用新型设备整体小型化,能够进行远程无线操控,可应用于各类交通设备底部位置、管廊自动巡检。管廊自动巡检。管廊自动巡检。
技术研发人员:赵晨光 张科星 魏宝宇 石伟 张海东 韩立成 刘清琳 王阳 姚连晖 闫安 张祝顺 崔立美
受保护的技术使用者:唐山旭华智能科技有限公司
技术研发日:2022.07.14
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。