1.本实用新型涉及焊接技术领域,具体地,涉及一种拼焊板件生产线。
背景技术:
2.工程机械钢结构件在制造过程中,因提升钢材利用率、产品结构需求等原因,需要将两件或者多件钢板拼焊对接。目前,钢板的拼焊采用人工操作的方式,工作效率低,存在一定的操作误差,工件焊接一致性不高,从而导致结构件的尺寸精度不高。
技术实现要素:
3.针对现有技术的上述至少一种缺陷或不足,本实用新型提供了一种拼焊板件生产线,能够将两个待焊板件全自动拼焊成拼焊板件,以达到提高焊接过程一致性、保证拼焊板件尺寸精确和提高生产效率等目的。
4.为实现上述目的,本实用新型提供了一种拼焊板件生产线,包括:
5.板件缓存系统,包括能够缓存多个待焊板件的待焊板件缓存系统和能够缓存多个拼焊板件的拼焊板件缓存系统;
6.自动拼焊系统,用于将待拼焊的两个所述待焊板件自动拼焊成所述拼焊板件;和
7.板件转运系统,设置为能够将待拼焊的两个所述待焊板件从所述待焊板件缓存系统转运至所述自动拼焊系统以及能够将所述自动拼焊系统中的所述拼焊板件最终转运至所述拼焊板件缓存系统。
8.可选地,所述自动拼焊系统包括辅助焊接工装和焊接机器人,所述辅助焊接工装包括:
9.焊接工作台,用于放置待拼焊的两个所述待焊板件;
10.待焊板件定位系统,设置在所述焊接工作台上且包括用于沿焊接方向定位待拼焊的两个所述待焊板件的焊接方向定位总成以及用于沿拼接方向定位待拼焊的两个所述待焊板件的拼接方向定位总成;
11.待焊板件锁定系统,设置在所述焊接工作台上且包括用于吸附锁定待拼焊的两个所述待焊板件的吸附锁定总成以及用于压接锁定待拼焊的两个所述待焊板件的压接锁定总成。
12.可选地,所述焊接方向定位总成包括固定限位件和焊接方向伸缩缸,所述拼接方向定位总成包括第一拼接方向伸缩缸和第二拼接方向伸缩缸,所述吸附锁定总成包括多个电磁铁,所述压接锁定总成包括横移机构、竖向伸缩缸和压接缓冲块;
13.其中,所述固定限位件和所述焊接方向伸缩缸分别布置在所述焊接工作台沿所述焊接方向的两侧边部区域,所述第一拼接方向伸缩缸和所述第二拼接方向伸缩缸分别布置在所述焊接工作台沿所述拼接方向的两侧边部区域,多个所述电磁铁相互间隔地嵌入所述焊接工作台的台面设置,所述横移机构设置在所述焊接工作台的上方,所述竖向伸缩缸的顶部与所述横移机构连接且底部与所述压接缓冲块连接。
14.可选地,所述焊接工作台形成有沿所述焊接方向延伸设置的工作台镂空部,所述拼接方向定位总成设置为能够将待拼焊的两个所述待焊板件沿所述拼接方向定位至使得板间待焊接缝隙与所述工作台镂空部对位,所述辅助焊接工装包括用于翻转所述焊接工作台的翻转驱动装置。
15.可选地,所述拼焊板件生产线包括能够对所述拼焊板件进行焊缝表面余高打磨或削除、引熄弧板切割、零件焊装孔切割和板面划线中的至少一种加工的附加处理系统,所述附加处理系统包括附加处理工作台、打磨装置、铣削装置、切割装置、划线装置以及能够选取所述打磨装置、所述铣削装置、所述切割装置和所述划线装置中的任意一者对所述拼焊板件进行相应加工的附加处理机器人。
16.可选地,所述板件转运系统设置为能够将所述自动拼焊系统中的所述拼焊板件转运至所述附加处理工作台以及能够将所述附加处理工作台上经过附加处理的所述拼焊板件转运至所述拼焊板件缓存系统。
17.可选地,所述待焊板件缓存系统包括待焊板件对中台和用于缓存所述待焊板件的待焊板件料架,所述板件转运系统设置为能够将所述待焊板件从所述待焊板件料架依次转运至所述待焊板件对中台和所述自动拼焊系统。
18.可选地,所述拼焊板件缓存系统包括拼焊板件缓存平台,所述板件转运系统设置为能够将所述自动拼焊系统中的所述拼焊板件最终转运至所述拼焊板件缓存平台。
19.可选地,所述拼焊板件生产线包括立体仓库,所述立体仓库包括拼焊板件存放架和能够将缓存在所述拼焊板件缓存系统中的所述拼焊板件自动存放至所述拼焊板件存放架上的自动入库设备。
20.可选地,所述板件转运系统包括搬运机器人和/或桁架机械手。
21.通过采用本实用新型的拼焊板件生产线,在进行拼焊之前,可利用待焊板件缓存系统将多个待焊板件缓存,在开始拼焊时,可通过板件转运系统将待拼焊的两个待焊板件从待焊板件缓存系统自动转运至所述自动拼焊系统,响应速度快,备料时间短。在两个待焊板件进入自动拼焊系统后,自动拼焊系统能够将其自动拼焊成拼焊板件,再由板件转运系统将自动拼焊系统中的拼焊板件进行转运,无论接下来是否要对拼焊板件进行附加处理加工,板件转运系统最终都能将拼焊板件转运至拼焊板件缓存系统中缓存。由此可见,本实用新型的拼焊板件生产线可实现拼焊板件的流水式自动生产,焊接过程一致性高,可保证拼焊板件尺寸精确,并可极大提高生产效率。
22.本实用新型的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
23.附图是用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型,但并不构成对本实用新型的限制。在附图中:
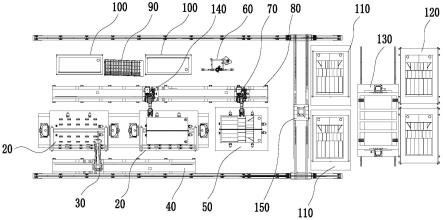
24.图1为本实用新型具体实施方式中一种拼焊板件生产线的示意图;
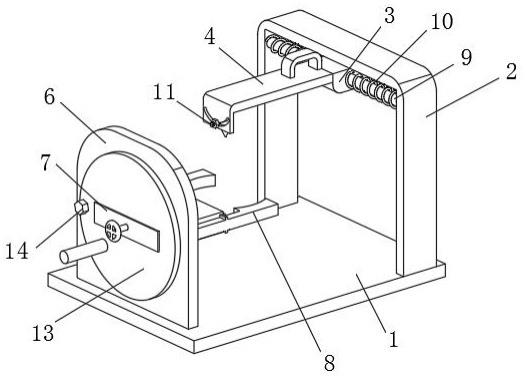
25.图2为图1中的辅助焊接工装的示意图;
26.图3为现有技术中一种拼焊板件在拼焊前后的对比示意图;
27.图4为现有技术中一种拼焊板件在拼焊前后的另一对比示意图;
28.图5为现有技术中一种板面上划线的拼焊板件的示意图。
29.附图标记说明:
30.10
ꢀꢀꢀꢀꢀ
拼焊板件
31.101
ꢀꢀꢀꢀ
待焊板件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102
ꢀꢀꢀꢀꢀ
零件焊装孔
32.103
ꢀꢀꢀꢀ
引熄弧端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104
ꢀꢀꢀꢀꢀ
引熄弧板
33.105
ꢀꢀꢀꢀ
待焊板件边缘
ꢀꢀꢀꢀꢀꢀꢀꢀ
106
ꢀꢀꢀꢀꢀ
焊缝
34.107
ꢀꢀꢀꢀ
焊缝表面余高
ꢀꢀꢀꢀꢀꢀꢀꢀ
108
ꢀꢀꢀꢀꢀ
零件焊装位置线
35.109
ꢀꢀꢀꢀ
零件对称中心线
ꢀꢀꢀꢀꢀꢀ
1010
ꢀꢀꢀꢀ
板间待焊接缝隙
36.20
ꢀꢀꢀꢀꢀ
辅助焊接工装
37.201
ꢀꢀꢀꢀ
焊接工作台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202
ꢀꢀꢀꢀꢀ
工作台镂空部
38.203
ꢀꢀꢀꢀ
固定限位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204
ꢀꢀꢀꢀꢀ
焊接方向伸缩缸
39.205
ꢀꢀꢀꢀ
第一拼接方向伸缩缸
ꢀꢀ
206
ꢀꢀꢀꢀꢀ
第二拼接方向伸缩缸
40.207
ꢀꢀꢀꢀ
电磁铁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
208
ꢀꢀꢀꢀꢀ
横移机构导轨
41.209
ꢀꢀꢀꢀ
横移机构行走梁
ꢀꢀꢀꢀꢀꢀ
2010
ꢀꢀꢀꢀ
竖向伸缩缸
42.2011
ꢀꢀꢀ
压接缓冲块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2012
ꢀꢀꢀꢀ
翻转驱动装置
43.30
ꢀꢀꢀꢀꢀ
焊接机器人
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
ꢀꢀꢀꢀꢀꢀ
第一行走地轨
44.50
ꢀꢀꢀꢀꢀ
附加处理工作台
ꢀꢀꢀꢀꢀꢀ
60
ꢀꢀꢀꢀꢀꢀ
装置放置架
45.70
ꢀꢀꢀꢀꢀ
附加处理机器人
ꢀꢀꢀꢀꢀꢀ
80
ꢀꢀꢀꢀꢀꢀ
第二行走地轨
46.90
ꢀꢀꢀꢀꢀ
待焊板件对中台
ꢀꢀꢀꢀꢀꢀ
100
ꢀꢀꢀꢀꢀ
待焊板件料架
47.110
ꢀꢀꢀꢀ
拼焊板件缓存平台
ꢀꢀꢀꢀ
120
ꢀꢀꢀꢀꢀ
拼焊板件存放架
48.130
ꢀꢀꢀꢀ
自动入库设备
ꢀꢀꢀꢀꢀꢀꢀꢀ
140
ꢀꢀꢀꢀꢀ
搬运机器人
49.150
ꢀꢀꢀꢀ
桁架机械手
具体实施方式
50.以下结合附图对本实用新型实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型实施例,并不用于限制本实用新型实施例。
51.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
52.在本实用新型实施例中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的或者是针对竖直、垂直或重力方向上而言的各部件相互位置关系描述用词。
53.在对本实用新型进行详细说明之前,首先对一种在工程机械中常见的拼焊板件的具体结构和制造过程进行说明。
54.参照图3至图5,拼焊板件10由两个对称的待焊板件101拼焊而成。在进行拼焊时,先将两个待焊板件101沿拼接方向相互靠近,使得两个待焊板件边缘105相互靠近和对齐以限定出板间待焊接缝隙1010,再沿焊接方向(与拼接方向相互垂直)对板间待焊接缝隙1010进行焊接以形成焊缝106,从而通过焊缝106将两个待焊板件101固定连接以形成拼焊板件10。
55.在焊接过程中,焊接起始端和结束端更容易出现焊接缺陷,因此在焊接之前,通常
会在板间待焊接缝隙1010的两端均设置引熄弧板104,这样,通过将焊接起始端和结束端设置在引熄弧板104上,便可将焊接缺陷留在引熄弧板104上。在焊接结束后,再切割去除引熄弧板104,便可得到焊接质量高的拼焊板件10。
56.在一些生产情况下,可以在切割备料时同步切割出待焊板件101的两端的引熄弧端103,在拼焊出拼焊板件10后,位于同一侧的两个引熄弧端103便共同拼接成一个引熄弧板104。通过在备料阶段同步切割出待焊板件101的两端的引熄弧端103,相对于采用人工装焊引熄弧板104的方式而言,可节省焊接前准备工序和时间,提高作业效率。
57.此外,根据实际生产要求的不同,在拼焊工序完成后,除了可能需要切割引熄弧板104以外,还可能需要执行一种或多种对拼焊板件10的附加处理工序。例如,附加处理工序可包括在拼焊板件10上切割出零件焊装孔102、在板面上划出零件焊装位置线108和零件对称中心线109、打磨或削除焊缝表面余高107等。对于零件焊装孔102,或者也可以在切割备料时在待焊板件101上同步切割成型。
58.下面将参考附图并结合示例性实施例来详细说明本实用新型。
59.本实用新型示例性实施例提供了一种拼焊板件生产线,其主要包括板件缓存系统、自动拼焊系统和板件转运系统。
60.具体地,板件缓存系统包括能够缓存多个待焊板件101的待焊板件缓存系统和能够缓存多个拼焊板件10的拼焊板件缓存系统。自动拼焊系统能够将待拼焊的两个待焊板件101自动拼焊成拼焊板件10,自动拼焊系统中可设有自动焊机或焊接机器人等自动焊接设备。板件转运系统能够将待拼焊的两个待焊板件101从待焊板件缓存系统转运至自动拼焊系统以及能够将自动拼焊系统中的拼焊板件10最终转运至拼焊板件缓存系统,板件转运系统中可设有桁架机械手、搬运机器人、agv小车、输送机等自动化转运设备。
61.通过采用本示例性实施例的拼焊板件生产线,在进行拼焊之前,可利用待焊板件缓存系统将多个待焊板件101缓存,在开始拼焊时,可通过板件转运系统将待拼焊的两个待焊板件101从待焊板件缓存系统自动转运至所述自动拼焊系统,响应速度快,备料时间短。在两个待焊板件101进入自动拼焊系统后,自动拼焊系统能够将其自动拼焊成拼焊板件10,再由板件转运系统将自动拼焊系统中的拼焊板件10进行转运,无论接下来是否要对拼焊板件进行附加处理加工,板件转运系统最终都能将拼焊板件10转运至拼焊板件缓存系统中缓存。由此可见,本示例性实施例的拼焊板件生产线可实现拼焊板件10的流水式自动生产,焊接过程一致性高,可保证拼焊板件10的尺寸精确,并可极大提高生产效率。
62.在一种实施例中,参照图1和图2,自动拼焊系统包括辅助焊接工装20和焊接机器人30,辅助焊接工装20包括焊接工作台201、待焊板件定位系统和待焊板件锁定系统。
63.其中,焊接工作台201用于放置待拼焊的两个待焊板件101。在焊接前,板件转运系统会将待拼焊的两个待焊板件101从待焊板件缓存系统转运至焊接工作台201上,两个待焊板件101的拼焊工序在焊接工作台201上执行。
64.待焊板件定位系统设置在焊接工作台201上,其包括焊接方向定位总成和拼接方向定位总成。在焊接前,利用焊接方向定位总成沿焊接方向定位两个待焊板件101且利用拼接方向定位总成沿拼接方向定位两个待焊板件101,可将两个待焊板件101预定位至在二者之间限定出板间待焊接缝隙1010。
65.待焊板件锁定系统设置在焊接工作台201上,其包括吸附锁定总成和压接锁定总
成。在待拼焊的两个待焊板件101预定位后,利用吸附锁定总成吸附两个待焊板件101的底面且利用压接锁定总成压接两个待焊板件101的顶面,可将两个待焊板件101完全锁定在焊接工作台201上,确保在执行拼焊工序时板件稳定。例如,吸附锁定总成可设置为对两个待焊板件101的底面进行大面积吸附,压接锁定总成可设置为对板间待焊接缝隙1010的邻近板面区域进行针对性压接。
66.在一种实施例中,焊接方向定位总成可包括固定限位件203和焊接方向伸缩缸204,拼接方向定位总成可包括第一拼接方向伸缩缸205和第二拼接方向伸缩缸206,吸附锁定总成可包括多个电磁铁207,压接锁定总成可包括横移机构、竖向伸缩缸2010和压接缓冲块2011。例如,固定限位件203可设置为块状结构,焊接方向伸缩缸204、第一拼接方向伸缩缸205、第二拼接方向伸缩缸206和竖向伸缩缸2010可设置为电动缸或气缸,横移机构可包括沿拼接方向延伸布置的横移机构导轨208和能够沿横移机构导轨208移动的横移机构行走梁209。
67.至于布置方面,固定限位件203和焊接方向伸缩缸204分别布置在焊接工作台201沿焊接方向的两侧边部区域,第一拼接方向伸缩缸205和第二拼接方向伸缩缸206分别布置在焊接工作台201沿拼接方向的两侧边部区域,多个电磁铁207相互间隔地嵌入焊接工作台201的台面设置,横移机构设置在焊接工作台201的上方,竖向伸缩缸2010的顶部与横移机构连接且底部与压接缓冲块2011连接,例如,在设有横移机构导轨208和横移机构行走梁209的情况下,竖向伸缩缸2010的顶部与横移机构行走梁209连接且底部与压接缓冲块2011连接。
68.基于本实施例,在对放置在焊接工作台201上待拼焊的两个待焊板件101进行拼焊之前,先利用焊接方向伸缩缸204将待焊板件101向固定限位件203推动,直到待焊板件101被固定限位件203止挡限位,即完成待焊板件101在焊接方向上的预定位。然后利用第一拼接方向伸缩缸205和第二拼接方向伸缩缸206推动两个待焊板件101相互靠近,直到限定出板间待焊接缝隙1010,即完成待焊板件101在拼接方向上的预定位。
69.在焊接方向和拼接方向均预定位后,电磁铁207对两个待焊板件101的底面形成吸附,再通过横移机构的横移动作配合竖向伸缩缸2010的下降动作驱动压接缓冲块2011对板间待焊接缝隙1010的邻近板面区域进行压接,至此,完成拼焊前的准备。
70.紧接着,便可利用焊接机器人30自动在板间待焊接缝隙1010焊接出焊缝106,以将两个待焊板件101拼焊成拼焊板件10。
71.在一种实施例中,焊接工作台201形成有沿焊接方向延伸设置的工作台镂空部202,此时拼接方向定位总成进一步设置为能够将待拼焊的两个待焊板件101沿拼接方向定位至使得板间待焊接缝隙1010与工作台镂空部202对位,同时,辅助焊接工装20还包括用于翻转焊接工作台201的翻转驱动装置2012。
72.如此设置,当板间待焊接缝隙1010的类型为需要对其上下两侧都进行焊接时,可在对板间待焊接缝隙1010的上侧焊接完成后,通过翻转驱动装置2012驱动焊接工作台201翻转180
°
,使得板间待焊接缝隙1010的下侧通过工作台镂空部202显露,此时焊接机器人30可伸入工作台镂空部202以对板间待焊接缝隙1010的下侧进行焊接。此外,在拼焊完成后,焊缝106下侧的焊缝表面余高107也可通过工作台镂空部202显露,从而可被打磨装置磨平或被铣削装置削除。
73.在一种实施例中,拼焊板件生产线还可包括附加处理系统,该附加处理系统能够对拼焊板件10进行焊缝表面余高107打磨或削除、引熄弧板104切割、零件焊装孔102切割和板面划线(例如划零件焊装位置线108和零件对称中心线109)中的至少一种加工。具体地,附加处理系统包括附加处理工作台50、打磨装置、铣削装置、切割装置、划线装置以及能够选取打磨装置、铣削装置、切割装置和划线装置中的任意一者对拼焊板件10进行相应加工的附加处理机器人70。
74.其中,焊缝表面余高107打磨或削除可以直接在焊接工作台201上进行,也可以在附加处理工作台50上进行。在需要打磨时,附加处理机器人70选取打磨装置对焊缝表面余高107进行磨平,在需要削除时,附加处理机器人70选取铣削装置对焊缝表面余高107进行削平。
75.此外,引熄弧板104切割、零件焊装孔102切割和板面划线可均在附加处理工作台50上进行。在需要对引熄弧板104进行切割时,通过附加处理机器人70选取切割装置来执行。在需要切割出零件焊装孔102时,通过附加处理机器人70选取切割装置来执行。在需要在板面划线时,通过附加处理机器人70选取划线装置来执行,划线装置可以是切割方式划线或喷墨方式划线等,或者,也可通过附加处理机器人70选取切割装置来执行板面划线工序。
76.对于打磨装置、铣削装置、切割装置、划线装置而言,可通过在拼焊板件生产线中设置装置放置架60对这些装置进行集中存放,此时附加处理机器人70可根据即将要执行的附加处理工序相应地从装置放置架60中选取合适的装置。
77.在一种实施例中,板件转运系统还设置为能够将自动拼焊系统中的拼焊板件10转运至附加处理工作台50以及能够将附加处理工作台50上经过附加处理的拼焊板件10转运至拼焊板件缓存系统,从而使产线能够依次执行拼焊工序和附加处理工序后再将拼焊板件10缓存。当然,在产线中设有附加处理系统的情况下,板件转运系统同样能够将自动拼焊系统中的拼焊板件10直接转运至拼焊板件缓存系统中进行缓存,这是由于并非每个拼焊板件10都需要进行附加处理。由此可见,本实施例中的产线可适于生产不同类型的拼焊板件10。
78.在一种实施例中,待焊板件缓存系统包括待焊板件对中台90和用于缓存待焊板件101的待焊板件料架100,板件转运系统设置为能够将待焊板件101从待焊板件料架100依次转运至待焊板件对中台90和自动拼焊系统。
79.换言之,在将待焊板件101从待焊板件料架100转运至自动拼焊系统的过程中,可先将待焊板件101转运至待焊板件对中台90中进行预先精定位。其中,待焊板件对中台90可以是重力对中台、机械对中台或光学对中台等不同类型的对中台。
80.在一种实施例中,拼焊板件缓存系统包括拼焊板件缓存平台110,板件转运系统设置为能够将自动拼焊系统中的拼焊板件10最终转运至拼焊板件缓存平台110。例如,在无须对拼焊板件10进行附加处理的情况下,板件转运系统能够将自动拼焊系统中的拼焊板件10直接转运至拼焊板件缓存平台110。在需要对拼焊板件10进行附加处理的情况下,板件转运系统能够先将自动拼焊系统中的拼焊板件10转运至附加处理工作台50,在附加处理工序完成后,板件转运系统能够进一步将拼焊板件10转运至拼焊板件缓存平台110。
81.在一种实施例中,拼焊板件生产线还可包括立体仓库,该立体仓库包括拼焊板件存放架120和自动入库设备130,自动入库设备130能够将缓存在拼焊板件缓存系统中的拼
焊板件10自动存放至拼焊板件存放架120上,以将拼焊板件10集中存放。例如,在设有拼焊板件缓存平台110的情况下,自动入库设备130能够将缓存在拼焊板件缓存平台110上的拼焊板件10自动存放至拼焊板件存放架120上,腾出拼焊板件缓存平台110上的缓存空间。自动入库设备130可以是堆垛机、立库提升机或穿梭车等不同类型的设备。
82.在一种实施例中,板件转运系统包括搬运机器人140和/或桁架机械手150。例如,可通过搬运机器人140实现待焊板件101从待焊板件缓存系统至自动拼焊系统的转运,可通过搬运机器人140实现待焊板件101从待焊板件料架100至待焊板件对中台90的转运,可通过桁架机械手150实现拼焊板件10在自动拼焊系统、附加处理系统和拼焊板件缓存系统三者之间的流转。
83.下面再以图1和图2所示的完整产线结构为例,描述一种拼焊板件生产线的作业原理,以更详细地解释本实用新型的构思。具体作业流程如下:
84.1、搬运机器人140将待拼焊的两个待焊板件101分别先从待焊板件料架100搬运至待焊板件对中台90进行预先的精定位,再分别搬运至焊接工作台201上。
85.2、在焊接工作台201上放置有待拼焊的两个待焊板件101后,先通过焊接方向伸缩缸204将待焊板件101推向固定限位件203,直到待焊板件101被固定限位件203止挡限位,即完成焊接方向上的预定位。然后,通过第一拼接方向伸缩缸205和第二拼接方向伸缩缸206同步相向伸缩,使两个待焊板件101相互靠近,直到限定出板间待焊接缝隙1010,即完成拼接方向上的预定位。
86.3、在完成对两个待焊板件101的预定位后,先通过电磁铁207吸附两个待焊板件101的底面,再通过横移机构的横移动作和竖向伸缩缸2010的下降动作配合,驱动压接缓冲块2011压接在板间待焊接缝隙1010的邻近板面区域,从而将两个待焊板件101完全锁定。
87.4、在将两个待焊板件101完全锁定后,焊接机器人30沿第一行走地轨40行走到位。然后,焊接机器人30首先对板间待焊接缝隙1010的上侧进行焊接,再通过翻转驱动装置2012驱动焊接工作台201翻转180
°
,焊接机器人30再伸入工作台镂空部202以对板间待焊接缝隙1010的下侧进行焊接,焊接完成后,焊缝106成型,然后再通过翻转驱动装置2012驱动焊接工作台201翻转180
°
。至此,两个待焊板件101被拼焊成拼焊板件10。
88.5、在拼焊工序完成后,待焊缝106冷却至一定温度后,附加处理机器人70从装置放置架60中选取打磨装置或铣削装置后沿第二行走地轨80行走到位,配合翻转驱动装置2012,以在焊接工作台201上将焊缝106上下两侧的焊缝表面余高107磨平或削平。
89.6、在处理完焊缝表面余高107后,辅助焊接工装20解除对拼焊板件10的锁定,然后桁架机械手150将拼焊板件10从焊接工作台201抓取至附加处理工作台50。
90.7、在附加处理工作台50上放置有拼焊板件10后,附加处理机器人70从装置放置架60中切换选取切割装置以及沿第二行走地轨80行走到位,以在附加处理工作台50上对拼焊板件10进行引熄弧板104切割、零件焊装孔102切割、板面划线等工序。
91.8、在执行完切割划线工序后,桁架机械手150将拼焊板件10从附加处理工作台50抓取至拼焊板件缓存平台110。然后,对放置在拼焊板件缓存平台110上的拼焊板件10进行外观检测、焊缝质量检测等工序。
92.9、在检测工序完成后,立体仓库的自动入库设备130将拼焊板件10从拼焊板件缓存平台110自动移入至存放在拼焊板件存放架120。至此,完成一次完整的生产工序。
93.需要说明的是,在实际生产中,焊缝表面余高107打磨或削除、引熄弧板104切割、零件焊装孔102切割、板面划线等工序的执行顺序可任意调整,或删减取消。例如,在上述作业流程中,在拼焊工序完成后,可以只磨平上侧或下侧的焊缝表面余高107,或者上下两侧的焊缝表面余高107均不磨平。此外,根据实际生产需求,可不设置搬运机器人140,所有转运工序改为全部由桁架机械手150执行。再者,辅助焊接工装20的数量可以为多个,通过搬运机器人140以穿插作业的方式搬运待焊板件101至不同的辅助焊接工装20上,以及通过焊接机器人30以穿插作业的方式进行自动拼焊,可以缩短设备停用、等候时间,进一步提高产线的焊接效率。
94.综合来看,本示例性实施例的拼焊板件生产线相对于现有技术而言,具有以下技术优势:
95.1、拼焊采用自动工装定位和机器人焊接的方式,使得拼焊板件10的尺寸精确,焊接过程的一致性高。
96.2、采用机器人磨平或削除焊缝表面余高107,焊缝106的形态一致性高。
97.3、采用机器人划线的方式,零件定位精度高,一致性高。
98.4、生产全过程采用自动化设备作业,生产效率高,拼焊板件10的质量、稳定性好。
99.以上结合附图详细描述了本实用新型实施例的可选实施方式,但是,本实用新型实施例并不限于上述实施方式中的具体细节,在本实用新型实施例的技术构思范围内,可以对本实用新型实施例的技术方案进行多种简单变型,这些简单变型均属于本实用新型实施例的保护范围。
100.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本实用新型实施例对各种可能的组合方式不再另行说明。
101.此外,本实用新型实施例的各种不同的实施方式之间也可以进行任意组合,只要其不违背本实用新型实施例的思想,其同样应当视为本实用新型实施例所公开的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。