1.本实用新型涉及道路检测技术领域,具体是毫米波雷达道路平整度检测车。
背景技术:
2.毫米波雷达,是工作在毫米波波段探测的雷达,通常毫米波是指30~300ghz频域的,与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候全天时的特点。
3.路面平整度指的是路表面纵向的凹凸量的偏差值,路面平整度是路面评价及路面施工验收中的一个重要指标,主要反映的是路面纵断面剖面曲线的平整性。
4.在道路建设完工后,需要检测道路的平整度是否达到国家道路建设的要求标准,而一般需要人工手持检测仪器在路面上进行测量,需要耗费大量人力和物力,同时检测的误差也较大,速率较低,因此需要一种毫米波雷达道路平整度检测车来提高检测效率,而现有的测量车一般将毫米波雷达安装在车辆前方,使得车辆在行驶的过程中,毫米波雷达容易受到外界异物的撞击,导致毫米波雷达出现损坏,影响毫米波雷达的使用寿命,且由于道路表面容易附着大量的粉尘和杂物,将原有的路面掩盖,容易影响毫米波雷达对路面的车辆数据,影响平整度的检测精度。
技术实现要素:
5.本实用新型旨在于解决背景技术中存在的缺点,提供毫米波雷达道路平整度检测车,通过保护盖、横梁和卡合组件的配合使用,能够对毫米波雷达进行保护,防止毫米波雷达受到外界异物的撞击而出现损坏,影响毫米波雷达的使用寿命,通过清扫组件对道路表面的粉尘和杂物进行清扫,将原有的路面外露出来,以便于毫米波雷达能够准确的车辆道路表面的数据,提高平整度的测量精度。
6.为实现上述目的,本实用新型提供如下技术方案,一种毫米波雷达道路平整度检测车,包括:车辆载体,所述车辆载体一侧固定连接支撑架,所述支撑架远离车辆载体的一侧固定连接有横梁,所述横梁上安装有多个毫米波雷达,多个所述毫米波雷达顶部设置有保护盖;设置于所述保护盖与所述横梁之间的卡合组件,用于固定所述保护盖;及设置于所述横梁下方用于对路面进行清洁的清扫组件。
7.进一步的,所述卡合组件包括:开设于所述横梁一侧的移动槽,所述移动槽内部设置有与其配套使用的移动板,所述移动板的一端凸出于横梁一侧面;开设与所述移动板表面的连接孔,所述连接孔内壁固定连接有卡块,且所述卡块的一端设置有倾斜面,所述横梁顶部开设有多个固定槽,且所述固定槽与移动槽相导通,所述保护盖底部固定连接有与固定槽配套使用的插板,所述插板底端设置有倾斜面,所述插板一侧开设有与卡块配套使用的卡槽。
8.进一步的,所述移动槽顶部和底部的内壁上开设有限位槽,所述移动板上、下表面均固定连接有限位板,所述限位板一侧固定连接有复位弹簧,且所述复位弹簧远离限位板
的一端与限位槽内壁相连接。
9.进一步的,所述清扫组件包括:固定连接于所述车辆载体一侧的连接杆,所述连接杆一侧固定连接有安装箱,所述安装箱内部固定安装有驱动电机,所述驱动电机底部通过驱动轴驱动连接有毛刷轮。
10.进一步的,所述车辆载体内部开设有设备腔,所述设备腔内部固定安装有蓄电池,所述车辆载体顶部固定安装有光伏板,所述光伏板与蓄电池电性连接。
11.进一步的,所述设备腔内部固定安装有处理设备,所述处理设备一侧固定安装有天线,且所述天线顶端凸出于车辆载体上表面,所述处理设备与蓄电池电性连接。
12.进一步的,所述车辆载体底部设置有两根轮轴,所述轮轴两端均固定安装有车轮,所述轮轴上固定安装有编码器。
13.本实用新型提供了一种毫米波雷达道路平整度检测车,具有以下有益效果:
14.本实用新型优点在于,通过保护盖、横梁和卡合组件的配合使用,能够对毫米波雷达进行保护,防止毫米波雷达受到外界异物的撞击而出现损坏,影响毫米波雷达的使用寿命。
15.其次,通过清扫组件对道路表面的粉尘和杂物进行清扫,将原有的路面外露出来,以便于毫米波雷达能够准确的车辆道路表面的数据,提高平整度的测量精度。
附图说明
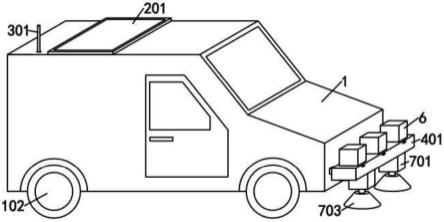
16.图1为本实用新型的整体结构示意图。
17.图2为本实用新型的整体结构剖视图。
18.图3为本实用新型的编码器结构示意图。
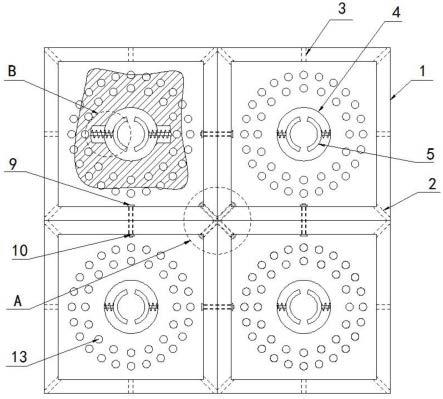
19.图4为本实用新型的横梁结构剖面图。
20.图5为本实用新型的保护盖结构示意图。
21.图6为本实用新型的移动板结构示意图。
22.图7为本实用新型的图4中的a处放大图。
23.图1-7中:1、车辆载体;101、设备腔;102、车轮;103、轮轴;104、编码器;2、蓄电池;201、光伏板;3、处理设备;301、天线;4、支撑架;401、横梁;402、移动槽;403、移动板;404、连接孔;405、卡块;406、固定槽;407、限位板;408、复位弹簧;5、毫米波雷达;6、保护盖;601、插板;602、卡槽;7、连接杆;701、安装箱;702、驱动电机;703、毛刷轮。
具体实施方式
24.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
25.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特
定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
26.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
27.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
28.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
29.本技术实施例提供一种毫米波雷达道路平整度检测车,该毫米波雷达道路平整度检测车可以实现通过保护盖、横梁和卡合组件的配合使用,能够对毫米波雷达进行保护,防止毫米波雷达受到外界异物的撞击而出现损坏,影响毫米波雷达的使用寿命。以下对该毫米波雷达道路平整度检测车进行详细说明。需说明的是,以下实施例的描述顺序不作为对实施例优选顺序的限定。
30.下面结合附图和具体实施方式对本技术予以详细描述。请参阅图1-7中,本实施例提供的一种毫米波雷达道路平整度检测车,包括:车辆载体1,所述车辆载体1一侧固定连接支撑架4,所述支撑架4远离车辆载体1的一侧固定连接有横梁401,所述横梁401上安装有多个毫米波雷达5,多个所述毫米波雷达5顶部设置有保护盖6;设置于所述保护盖6与所述横梁401之间的卡合组件,用于固定所述保护盖6;及设置于所述横梁401下方用于对路面进行清洁的清扫组件。
31.在本实施例中,毫米波雷达道路平整度检测车主要包括车辆载体1、支撑架4、横梁401、毫米波雷达5、保护盖6、卡合组件和清扫组件。通过保护盖6、横梁401和卡合组件的配合使用,能够对毫米波雷达5进行保护,防止毫米波雷达5受到外界异物的撞击而出现损坏,影响毫米波雷达的使用寿命。其次,通过清扫组件对道路表面的粉尘和杂物进行清扫,将原有的路面外露出来,以便于毫米波雷达5能够准确的测量道路表面的数据,提高平整度的测量精度。
32.示例性的,卡合组件包括:开设于横梁401一侧的移动槽402,移动槽402内部设置
有与其配套使用的移动板403,移动板403的一端凸出于横梁401一侧面;开设与移动板403表面的连接孔404,连接孔404内壁固定连接有卡块405,且卡块405的一端设置有倾斜面,横梁401顶部开设有多个固定槽406,且固定槽406与移动槽402相导通,保护盖6底部固定连接有与固定槽406配套使用的插板601,插板601底端设置有倾斜面,插板601一侧开设有与卡块405配套使用的卡槽602。
33.在一些实施例中,由于毫米波雷达5安装在车辆载体1的前方,使得车辆载体1在行驶的过程中,毫米波雷达5容易受到道路前方异物的碰撞,导致毫米波雷达5出现损坏,此时将保护盖6置于毫米波雷达5上方,并使插板601与固定槽406的位置相对应,然后移动保护盖6,使得插板601贯穿固定槽406插入到移动板403上的连接孔404内,而插板601底端的倾斜面与卡块405的倾斜面接触,并挤压卡块405,使得卡块405带动移动板403整体进行移动,此时移动板403带动限位板407移动并挤压复位弹簧408,使得复位弹簧408受到挤压发生弹性变形产生弹力,并将产生的弹力通过限位板407作用与移动板403上,待保护盖6完全与横梁401接触后,此时插板601一侧的卡槽602与卡块405位置相对应,使得卡块405在复位弹簧408弹力的作用下回弹插入到卡槽602内,使得插板601通过卡块405和卡槽602与移动板403卡合连接,进而与横梁401卡合连接,完成对保护盖6的固定,使得保护盖6能够对毫米波雷达5起到保护的作用。
34.在一些实施例中,移动槽402顶部和底部的内壁上开设有限位槽,移动板403上、下表面均固定连接有限位板407,限位板407一侧固定连接有复位弹簧408,且复位弹簧408远离限位板407的一端与限位槽内壁相连接。
35.在一些实施例中,移动板403在移动的过程中,通过限位板407和限位槽对移动板403的移动方向和移动距离进行限定,而在需要拆卸保护盖6时,通过按压移动板403,使得移动板403带动卡块405与卡槽602分离,使得插板601与移动板403分离,此时将保护盖6取下,便可对毫米波雷达5进行日常维护。
36.示例性的,清扫组件包括:固定连接于车辆载体1一侧的连接杆7,连接杆7一侧固定连接有安装箱701,安装箱701内部固定安装有驱动电机702,驱动电机702底部通过驱动轴驱动连接有毛刷轮703。
37.在一些实施例中,由于道路上容易积累大量的粉尘和杂质,导致原本的路面被完全覆盖遮掩,容易影响毫米波雷达5对路面平整度的检测精度,此时启动驱动电机702,使得驱动电机702通过驱动轴带动毛刷轮703进行转动,使得毛刷轮703对道路表面的粉尘和杂质进行清扫,将原本的路面外露出来,使得毫米波雷达5能够精准的对道路路面进行测量,提高道路平整度的检测精度。
38.在一些实施例中,车辆载体1内部开设有设备腔101,设备腔101内部固定安装有蓄电池2,车辆载体1顶部固定安装有光伏板201,光伏板201与蓄电池2电性连接。
39.在一些实施例中,通过光伏板201将光能转换为电能,并通过蓄电池2进行将转换的电能进行存储,使得蓄电池2能够为处理设备3提供一个安全稳定的工作电源,提高处理设备3的使用时间,防止电量不足而影响处理设备3对检测数据的采集和数据分析。
40.在一些实施例中,设备腔101内部固定安装有处理设备3,处理设备3一侧固定安装有天线301,且天线301顶端凸出于车辆载体1上表面,处理设备3与蓄电池2电性连接,处理设备3内部安装有处理设备3内部安装有毫米波雷达采集系统、gps、以及编码器采集系统,
通过天线301和处理设备3内的gps系统,实现车辆载体1位置的实时定位,通过毫米波雷达5对行驶过的道路进行数据采集,并将采集到的数据输送到处理设备3内,通过处理设备3对毫米波雷达5测量的数据和编码器104记录的数据进行数据处理和分析,得到道路的平整度数据。
41.在一些实施例中,车辆载体1底部设置有两根轮轴103,轮轴103两端均固定安装有车轮102,轮轴103上固定安装有编码器104,编码器104与处理设备3电性连接,车辆载体1在行驶的过程中带动轮轴103和车轮102进行转动,使得轮轴103上的编码器104记录轮轴103的转动次数,以此来记录车辆载体1的行驶距离,并将记录的数据传输到处理设备3上。
42.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
43.以上对本技术实施例所提供的一种毫米波雷达道路平整度检测车进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的技术方案及其核心思想;本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例的技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。