1.本实用新型涉及起重机定位技术领域,更具体地,涉及一种集装箱龙门起重机的行走定位装置。
背景技术:
2.港口主要使用门式起重机(简称场桥)在码头堆场内进行集装箱卡车和集装箱堆垛之间的集装箱转移作业。
3.目前,场地集装箱轮胎吊行走纠偏和防撞的检测手段包括gps定位自动纠偏法,单点激光测距仪结合反射板自动纠偏法,图像处理纠偏,人工纠偏,以集装箱侧面为参考面的轮胎吊纠偏法,但这些方法都各有缺点。gps定位容易受到人为篡改数据导致数据出错且需定期校正。单点激光测距仪结合反射板自动纠偏法,则需要在一旁安装长反射板,并不实用。图像处理纠偏容易受天气光线影响,稳定性不够。轮胎吊司机调整车轮行走方向,即人工纠偏,这种方法精度低,容易造成司机疲劳。以集装箱侧面为参考面的轮胎吊纠偏法则当堆场上没有集装箱时,无法准确对位。
技术实现要素:
4.本实用新型提供一种集装箱龙门起重机的行走定位装置,通过在驱动架前轮上各安装一个激光传感器,并在集装箱龙门起重机车道背面过道中心线上以一定的距离或者以集装箱长度为间隔安装立柱,激光传感器检测立柱位置,实现轮胎吊在堆场内箱位位置定位、自动纠偏。
5.根据本实用新型的一个方面,提供一种集装箱龙门起重机的行走定位装置,所述集装箱龙门起重机装设在参照物之间的滑轨上,所述行走定位装置包括驱动架和主梁,两个所述驱动架间隔设置并通过所述主梁相连,所述驱动架底部设置有与所述滑轨适配的滚轮,所述滚轮由电机驱动,并在所述驱动架上设置有控制箱,所述驱动架的头部和尾部设置有激光传感器,所述激光传感器和所述电机分别与所述控制箱相连,所述激光传感器间歇与所述参照物感应。
6.在上述方案基础上优选,所述控制箱为plc控制器。
7.在上述方案基础上优选,所述驱动架上设置有安装架,所述安装架向外延伸,所述激光传感器装设在所述安装架上。
8.在上述方案基础上优选,所述安装架包括与所述驱动架连接的支杆、内设腔体的缓冲座和安装板,所述支杆的底部设置有安装缘,所述缓冲座与所述安装缘通过安装轴相连,所述安装轴延伸至所述腔体内连接有连杆结构,所述连杆结构的底部穿过连接座连接所述安装板,所述安装板上设置有连接杆,所述连接杆的另一端贯穿过所述缓冲座通过螺母以锁紧,并在所述腔体背离所述连杆一侧设置有吊环,所述吊环与所述连杆之间设置有压缩弹簧。
9.在上述方案基础上优选,所述安装板上设置有连接座和吊环,所述连接座和吊环
穿过所述安装板的端面设置有安装槽,所述激光传感器嵌入式装设在所述安装槽内。
10.本实用新型的一种集装箱龙门起重机的行走定位装置,通过在行走轮上设置四个激光传感器,利用激光传感器发射光至参照物上,以获取滚轮与参照物之间的直线距离,通过先后获取的直线距离进行比较,从而得到龙门起重机是否走偏,并通过控制器调整电机输出转速和功率,从而调整龙门起重机的行走轨迹,以达到纠偏定位的目的。
11.与此同时,本实用新型采用内嵌式的缓冲结构,将激光头安装在安装板上,通过安装板连接的连杆和吊环,从而其安装板或者激光头受到碰撞时候,迅速收缩以缓冲碰撞造成的激光传感器的损伤,提高其使用寿命和检测准确性。
附图说明
12.图1为本实用新型的集装箱龙门起重机的行走定位装置的俯视图;
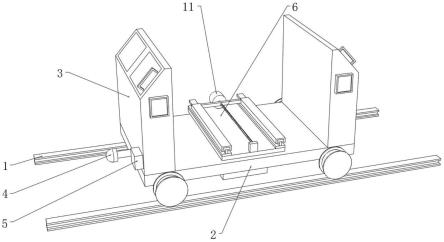
13.图2为实用新型的集装箱龙门起重机的行走定位装置的立体图;
14.图3本实用新型的支杆的局部剖视图;
15.图4为本实用新型的集装箱龙门起重机的行走定位装置的原理图;
16.图5为本实用新型的支杆的结构图。
具体实施方式
17.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
18.请参阅图1,并结合图2、图3和图4所示,本实用新型的一种集装箱龙门起重机的行走定位装置,集装箱龙门起重机装设在参照物100之间的滑轨400上,行走定位装置包括驱动架200和主梁300,两个驱动架200间隔设置并通过主梁300相连,驱动架200底部设置有与滑轨400适配的滚轮800,滚轮由电机500驱动,并在驱动架200上设置有控制箱600,驱动架200的头部和尾部设置有激光传感器700,激光传感器700和电机500分别与控制箱600相连,激光传感器700间歇与参照物100感应,其中,控制箱600优选为plc控制器。
19.本实用新型通过两个激光传感器700安装在集装箱龙门起重机的驱动架200前后位置上,每个激光传感器700与参照物100作用,以获取当前时间与参照物100之间的相对位置,利用plc控制器发出向前、向后的指令。
20.当前方有障碍物时,会发出“慢速”“停止”指令,为了更好的实现集装箱龙门起重机自动纠偏,减少人工操作,利用激光传感器700测量该点与参照物100的距离,以得到前进方向两根参照物100与车辆行驶延伸方向的垂直距离,plc控制器控制前后电机500转速的快和慢,来实现集装箱龙门起重机自动纠偏功能,达到精确定位。对前进方向的人和物,进行扫描确认,达到防撞功能。
21.为了方便安装和检修,本实用新型在驱动架200上设置有安装架210,安装架210向外延伸,激光传感器700装设在安装架210上。
22.由于在工作现场,经常会出现意外的障碍物,容易造成检测末端的损伤,影响其检测效果,针对上述的问题,本实用新型提出进一步的优化安装架210的结构,以达到降低检测末端,因意外造成的受损度。
23.如图3和图5所示,本实用新型的安装架210包括与驱动架200连接的支杆220、内设
腔体231的缓冲座230和安装板240,支杆220的底部设置有安装缘232,缓冲座230与安装缘232通过安装轴233相连,安装轴233延伸至腔体231内连接有连杆结构250,缓冲座230的两端形成连接缘258,并在缓冲座230底部设置有安装孔,安装孔中分别穿设有吊环255和缓冲座230,而吊环255和缓冲座230穿过安装孔后与安装板240固定相连。
24.与此同时,为了实现安装板240与缓冲座230之间的相对运动,本实用新型在安装板240的两侧设置有连接杆253,连接杆253一端与安装板240固定连接,连接杆253的另一端贯穿安装座的连接缘258后通过螺母254以锁紧。
25.其中,本实用新型的连杆结构250包括第一连杆251和第二连杆252,第二连杆252呈“l”型,第一连杆251的一端与安装轴233相连,而第一连杆251的另一端与第二连杆252的转点铰接,而第二连杆252的其中一个自由端与连接座259相连,而第二连杆252的另一个自由端与吊环255连接,吊环255与连杆之间设置有压缩弹簧256。
26.因此,在安装板240受到作用力时,首先,连杆结构250会发生转动,从而带动安装板240收缩运动,此时,压缩弹簧256处于收缩状态;当外界作用力消失后,压缩弹簧256在其自身作用力下,推动第二连杆252运动,从而以驱使安装板240向外运动,实现了其自动伸张。
27.值得说明的是,本实用新型安装板240的端面设置有安装槽257,激光传感器700嵌入式装设在安装槽257内。
28.本实用新型的一种集装箱龙门起重机的行走定位装置,通过在行走轮上设置四个激光传感器700,利用激光传感器700发射光至参照物100上,以获取滚轮与参照物100之间的直线距离,通过先后获取的直线距离进行比较,从而以得到龙门起重机是否走偏,并通过控制器调整电机500输出转速和功率,从而调整龙门起重机的行走轨迹,以达到纠偏定位的目的。
29.与此同时,本实用新型采用内嵌式的缓冲结构,将激光头安装在安装板240上,通过安装板240连接的连杆和吊环255,从而其安装板240或者激光头受到碰撞时候,迅速收缩以缓冲碰撞造成的激光传感器700的损伤,提高其使用寿命和检测准确性。
30.最后,本技术的方法仅为较佳的实施方案,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。