技术特征:
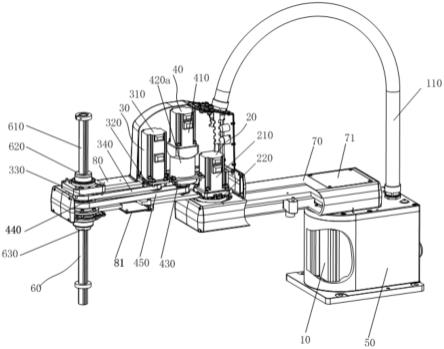
1.一种机器人,其特征在于,包括底座、花键丝杆组件、第一驱动模块、第二驱动模块、第三驱动模块、第四驱动模块、第一连接臂与第二连接臂,所述第一连接臂与第二连接臂为挤出成型结构,所述第一连接臂的一端通过所述第一驱动模块与所述底座转动连接,所述第一连接臂的另一端通过所述第二驱动模块与所述第二连接臂的一端转动连接,所述花键丝杆组件设于所述第二连接臂的另一端且穿设于所述第二连接臂,所述第三驱动模块设于所述第二连接臂且与所述花键丝杆组件传动连接,用于驱动所述花键丝杆组件沿所述第二连接臂的垂直方向上下运动,第四驱动模块设于所述第二连接臂且与所述花键丝杆组件传动连接,用于驱动所述花键丝杆组件绕所述第二连接臂的垂直方向旋转运动。2.根据权利要求1所述的机器人,其特征在于,所述第一连接臂包括挤出成型的第一顶板、第一底板及两块第一侧板,两块第一侧板分别连接于所述第一顶板与第一底板的两侧,所述第二连接臂包括挤出成型的第二顶板、第二底板及两块第二侧板,两块第二侧板分别连接于所述第二顶板与第二底板的两侧,所述第一底板的第一端开设有第一安装孔,所述第一顶板的第二端开设有第二安装孔,所述第二顶板的第一端开设有第三安装孔、第四安装孔及第五安装孔,所述第二底板的第一端开设有与所述第三安装孔对应的连通孔,所述第二顶板的第二端开设有第六安装孔,所述第二底板的第二端开设有与所述第六安装孔对应的第七安装孔,所述第一驱动模块设于所述底座内且其驱动端伸入所述第一安装孔与所述第一连接臂连接,所述第二驱动模块穿设于所述第三安装孔、连通孔及第二安装孔且其驱动端与所述第二连接臂转动连接,所述花键丝杆组件穿设于所述第六安装孔与第七安装孔,所述第三驱动模块的驱动端穿设于所述第四安装孔并与所述花键丝杆组件传动连接,所述第四驱动模块的驱动端穿设于所述第五安装孔并与所述花键丝杆组件传动连接。3.根据权利要求2所述的机器人,其特征在于,所述第一顶板与第一底板之间具有挤出成型的中间板,所述中间板与所述第一顶板平行设置,所述中间板的第一端设有与所述第一安装孔对应的第一安装位,所述第一安装位设有呈周向布置的多个第一连接孔;所述中间板的第二端设有与所述第二安装孔对应的第二安装位,所述第二安装位设有呈周向布置的多个第二连接孔;所述第一驱动模块包括第一电机与第一减速机,所述第一电机固定于所述底座上,第一电机的输出轴与第一减速机连接,所述第一减速机的驱动端穿设于第一安装孔并通过第一紧固件与第一连接孔配合与所述中间板连接,所述第一减速机的固定端固定于所述底座;所述第二驱动模块包括第二电机与第二减速机,所述第二电机固定于所述第二连接臂上,第二电机的输出轴穿设于第三安装孔及连通孔与所述第二减速机连接,所述第二减速机的驱动端与第二连接臂连接,所述第二减速机的固定端穿设于第二安装孔并通过第二紧固件与第二连接孔配合固定于所述中间板。4.根据权利要求3所述的机器人,其特征在于,所述第三驱动模块包括第三电机、第一主动带轮、第一从动带轮、第一同步带;所述花键丝杆组件包括丝杆及丝杆螺母;所述第三电机固定于所述第二连接臂且其驱动端穿设于第四安装孔,所述第一主动带轮与所述第三电机的驱动端固定连接,所述第一同步带套设于第一主动带轮与第一从动带轮上,所述第一从动带轮套设于所述丝杆外,所述第一从动带轮与所述丝杆螺母的内圈固
定连接,所述丝杆螺母的内圈与所述丝杆滚动连接,所述丝杆螺母的外圈与所述第二顶板固定连接,所述丝杆螺母的外圈与所述丝杆螺母的内圈之间滚动连接。5.根据权利要求4所述的机器人,其特征在于,所述第四驱动模块包括第四电机、第四减速机、第二主动带轮、第二从动带轮及第二同步带;所述花键丝杆组件还包括花键螺母;所述第四电机与所述第四减速机连接,所述第四减速机固定于所述第二连接臂且其驱动端穿设于第五安装孔,所述第二主动带轮与所述第四减速机的驱动端固定连接,所述第二同步带套设于第二主动带轮与第二从动带轮上,所述第二从动轮套设于所述丝杆外,所述第二从动轮与所述花键螺母的内圈固定连接,所述花键螺母的内圈与所述丝杆滚动连接,所述花键螺母的外圈与所述第二底板固定连接,所述花键螺母的外圈与所述花键螺母的内圈之间滚动连接,所述第四减速机为行星减速机。6.根据权利要求4所述的机器人,其特征在于,所述第四驱动模块包括第四电机、第四减速机、第二主动带轮、第二从动带轮、第二同步带;所述花键丝杆组件还包括花键螺母;所述第四电机固定于所述第二连接臂且其输出轴穿设于第五安装孔,所述第二主动带轮与所述第四电机的输出轴固定连接,所述第二同步带套设于第二主动带轮与第二从动带轮上,所述第二从动轮及第四减速机套设于所述丝杆外,所述第二从动轮与第四减速机的输入端固定连接,所述第四减速机的驱动端与所述花键螺母的内圈固定连接,所述花键螺母的内圈与所述丝杆滚动连接,所述第四减速机与所述第二底板固定连接,所述花键螺母的外圈与所述第二底板固定连接,所述花键螺母的外圈与所述花键螺母的内圈之间滚动连接,所述第四减速机为谐波减速机。7.根据权利要求2-6任一项所述的机器人,其特征在于,所述第二顶板与第二底板之间具有挤出成型的支撑板,所述支撑板与所述第二顶板及第二底板垂直设置。8.根据权利要求7所述的机器人,其特征在于,所述机器人还包括两个第一端盖及多个第一连接件,所述第一侧板与第一顶板及第一底板的连接处均设有挤出成型的第一预留孔,第一连接件穿设于所述第一端盖及所述第一预留孔锁紧于所述第一连接臂;和/或,所述机器人还包括两个第二端盖及多个第二连接件,所述支撑板与第二顶板及第二底板的连接处均设有挤出成型的第二预留孔,所述第二连接件穿设于所述第二端盖通及所述第二预留孔锁紧于所述第二连接臂。9.根据权利要求2-6任一项所述的机器人,其特征在于,还包括机罩、穿线管及多个第三连接件,所述机罩罩设于所述第二驱动模块、第三驱动模块及第四驱动模块外,所述第二顶板的第一端还开设有固定孔,所述第三连接件穿设于所述机罩及固定孔固定于所述第二连接臂。
技术总结
本实用新型涉及一种机器人,机器人包括底座、花键丝杆组件、第一驱动模块、第二驱动模块、第三驱动模块、第四驱动模块、第一连接臂与第二连接臂,第一连接臂与第二连接臂为挤出成型结构,第一连接臂的一端通过第一驱动模块与底座转动连接,第一连接臂的另一端通过第二驱动模块与第二连接臂的一端转动连接,花键丝杆组件设于第二连接臂的另一端且穿设于第二连接臂,第三驱动模块及第四驱动模块设于第二连接臂且与花键丝杆组件传动连接。通过挤出成型结构的第一连接臂与第二连接臂,无需配置多套模具,可低成本地得到第一连接臂与第二连接臂,采用模块化的结构,快速构建出不同臂长且工作空间大的机器人系统。工作空间大的机器人系统。工作空间大的机器人系统。
技术研发人员:钟玉 顾谢平 黄国辉 罗欣
受保护的技术使用者:深圳众为兴技术股份有限公司
技术研发日:2022.03.11
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。