技术特征:
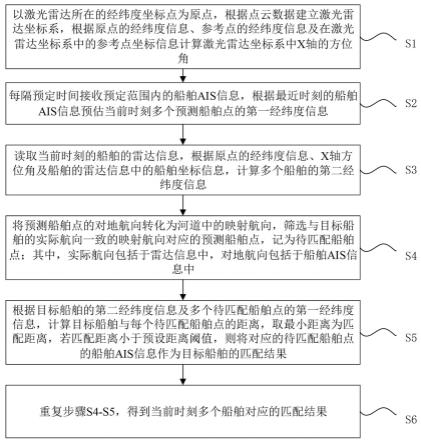
1.一种基于激光雷达和ais的船舶识别方法,其特征在于,包括:s1、以激光雷达所在的经纬度坐标点为原点,根据点云数据建立激光雷达坐标系,根据原点的经纬度信息、参考点的经纬度信息及在激光雷达坐标系中的参考点坐标信息计算激光雷达坐标系中x轴的方位角;s2、每隔预定时间接收预定范围内的船舶ais信息,根据最近时刻的所述船舶ais信息预估当前时刻多个预测船舶点的第一经纬度信息;s3、读取当前时刻的船舶的雷达信息,根据所述原点的经纬度信息、x轴方位角及船舶的雷达信息中的船舶坐标信息,计算多个船舶的第二经纬度信息;s4、将预测船舶点的对地航向转化为河道中的映射航向,筛选与目标船舶的实际航向一致的映射航向对应的预测船舶点,记为待匹配船舶点;其中,所述实际航向包括于雷达信息中,所述对地航向包括于船舶ais信息中;s5、根据目标船舶的第二经纬度信息及多个待匹配船舶点的第一经纬度信息,计算目标船舶与每个待匹配船舶点的距离,取最小距离为匹配距离,若匹配距离小于预设距离阈值,则将对应的待匹配船舶点的船舶ais信息作为目标船舶的匹配结果;s6、重复步骤s4-s5,得到当前时刻多个船舶对应的匹配结果。2.根据权利要求1所述的基于激光雷达和ais的船舶识别方法,其特征在于,所述以激光雷达所在的经纬度坐标点为原点,根据点云数据建立激光雷达坐标系,根据原点的经纬度信息、参考点的经纬度信息及在激光雷达坐标系中的参考点坐标信息计算激光雷达坐标系中x轴的方位角,包括:s101、根据所述参考点坐标信息,计算参考点-原点的连线与x轴的夹角;s102、根据原点的经纬度信息及参考点的经纬度信息,计算参考点-原点的连线的方位角;s103、根据所述夹角及所述方位角,计算x轴的方位角。3.根据权利要求1所述的基于激光雷达和ais的船舶识别方法,其特征在于,所述每隔预定时间接收预定范围内的船舶ais信息,根据最近时刻的所述船舶ais信息预估当前时刻多个预测船舶点的第一经纬度信息,包括:s201、根据接收到的船舶ais信息中的mmsi码将同一个船舶的静态数据及动态数据融合;s202、根据最近时刻的每个船舶ais信息中对地航向、航速、经纬度信息以及最近时刻与当前时刻的时间差,计算每个预测船舶点的第一经纬度信息。4.根据权利要求1所述的基于激光雷达和ais的船舶识别方法,其特征在于,所述得到多个船舶对应的匹配结果之后,包括:s7、当第一经纬度信息的数量等于第二经纬度信息的数量时,若每个匹配结果对应唯一的船舶,则每个船舶对应的匹配结果作为最终匹配结果;若同一个匹配结果对应至少两个船舶,则采用匈牙利算法对所有待匹配船舶点和所有船舶进行重新匹配,得到每个船舶的最终匹配结果;s8、当第一经纬度信息的数量大于第二经纬度信息的数量时,通知激光雷达根据未匹配的预测船舶点对应的经纬度信息进行重点扫描;s9、当第一经纬度信息的数量小于第二经纬度信息的数量,同一匹配结果对应有至少
两个船舶时,将该匹配结果作为匹配距离最小的船舶的最终匹配结果。5.根据权利要求1所述的基于激光雷达和ais的船舶识别方法,其特征在于,所述得到多个船舶对应的匹配结果之后,包括:s10、将当前时刻的匹配结果与上一时刻的匹配结果对比,若同一船舶两个时刻的匹配结果不同,则将最小匹配距离对应的匹配结果作为当前时刻该船舶的最新匹配结果;若同一船舶两个时刻的匹配结果相同,则不更新该船舶的匹配结果。6.一种基于激光雷达和ais的船舶识别装置,其特征在于,包括:方位角计算模块,用于以激光雷达所在的经纬度坐标点为原点,根据点云数据建立激光雷达坐标系,根据原点的经纬度信息、参考点的经纬度信息及在激光雷达坐标系中的参考点坐标信息计算激光雷达坐标系中x轴的方位角;第一经纬度信息计算模块,用于每隔预定时间接收预定范围内的船舶ais信息,根据最近时刻的所述船舶ais信息预估当前时刻多个预测船舶点的第一经纬度信息;第二经纬度信息计算模块,用于读取当前时刻的船舶的雷达信息,根据所述原点的经纬度信息、x轴方位角及船舶的雷达信息中的船舶坐标信息,计算多个船舶的第二经纬度信息;方向匹配模块,用于将预测船舶点的对地航向转化为河道中的映射航向,筛选与目标船舶的实际航向一致的映射航向对应的预测船舶点,记为待匹配船舶点;其中,所述实际航向包括于雷达信息中,所述对地航向包括于船舶ais信息中;距离匹配模块,用于根据目标船舶的第二经纬度信息及多个待匹配船舶点的第一经纬度信息,计算目标船舶与每个待匹配船舶点的距离,取最小距离为匹配距离,若匹配距离小于预设距离阈值,则将对应的待匹配船舶点的船舶ais信息作为目标船舶的匹配结果;循环匹配模块,用于重复方向匹配模块及距离匹配模块的步骤,得到当前时刻多个船舶对应的匹配结果。7.根据权利要求6所述的基于激光雷达和ais的船舶识别装置,其特征在于,所述方位角计算模块包括:夹角计算子模块,用于根据所述参考点坐标信息,计算参考点-原点的连线与x轴的夹角;第一方位角计算子模块,用于根据原点的经纬度信息及参考点的经纬度信息,计算参考点-原点的连线的方位角;第二方位角计算子模块,用于根据所述夹角及所述方位角,计算x轴的方位角。8.根据权利要求6所述的基于激光雷达和ais的船舶识别装置,其特征在于,所述第一经纬度信息计算模块包括:数据融合子模块,用于根据接收到的船舶ais信息中的mmsi码将同一个船舶的静态数据及动态数据融合;数据处理子模块,用于根据最近时刻的每个船舶ais信息中对地航向、航速、经纬度信息以及最近时刻与当前时刻的时间差,计算每个预测船舶点的第一经纬度信息。9.根据权利要求6所述的基于激光雷达和ais的船舶识别装置,其特征在于,包括:第一修正模块,用于当第一经纬度信息的数量等于第二经纬度信息的数量时,若每个匹配结果对应唯一的船舶,则每个船舶对应的匹配结果作为最终匹配结果;若同一个匹配
结果对应至少两个船舶,则采用匈牙利算法对所有待匹配船舶点和所有船舶进行重新匹配,得到每个船舶的最终匹配结果;第二修正模块,用于当第一经纬度信息的数量大于第二经纬度信息的数量时,通知激光雷达根据未匹配的预测船舶点对应的经纬度信息进行重点扫描;第三修正模块,用于当第一经纬度信息的数量小于第二经纬度信息的数量,同一匹配结果对应有至少两个船舶时,将该匹配结果作为匹配距离最小的船舶的最终匹配结果。10.根据权利要求6所述的基于激光雷达和ais的船舶识别装置,其特征在于,包括:匹配结果更新模块,用于将当前时刻的匹配结果与上一时刻的匹配结果对比,若同一船舶两个时刻的匹配结果不同,则将最小匹配距离对应的匹配结果作为当前时刻该船舶的最新匹配结果;若同一船舶两个时刻的匹配结果相同,则不更新该船舶的匹配结果。
技术总结
本发明公开了一种基于激光雷达和AIS的船舶识别方法,建立激光雷达坐标系并计算坐标系中的X轴方位角,通过船舶AIS信息计算当前时刻预测船舶点的第一经纬度信息,通过雷达信息计算船舶的第二经纬度信息,将预测船舶点的航向与实际船舶的航向进行匹配,方向一致后根据第一经纬度信息与第二经纬度信息计算与目标船舶距离最小的预测船舶点,若距离小于预设距离阈值,则认为该目标船舶与对应的预测船舶点匹配成功,将预测船舶点对应的AIS信息作为目标船舶的匹配结果。通过激光雷达的雷达信息与AIS信息进行方向匹配及距离匹配,得到船舶对应的AIS信息中的MMSI码,从而快速、简单的完成船舶的识别。船舶的识别。船舶的识别。
技术研发人员:叶建标 高贤亮 沈琳 温志伟 陈江海 李军
受保护的技术使用者:浙江华是科技股份有限公司
技术研发日:2022.10.12
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。