1.本发明属于精密仪器以及精密测量技术领域,具体涉及一种基于激光干涉仪的复眼单元运动误差测量装置。
背景技术:
2.光刻机是用于制造晶体管、wire和其他芯片核心组建的关键设备,对研制世界最快尖端计算机处理器并保证处理器运算效率与精度至关重要。光刻机系统具有高集成度,其有限的空间内至少包括十万个微小且协调运作的功能单元,任意一个功能单元的性能与功能均可对光刻机整体的性能产生重要的影响,因而保证光刻机功能单元的运动精度、使用效率与稳定性必不可少。
3.光刻机系统结构复杂,其主要包括光源与照明系统、物镜系统、运动台系统、控制系统、环控系统及精密测量系统等六大分系统,分系统间相互协同合作以实现光刻机复杂的功能与特性。复眼单元是光刻机光源与照明系统的重要组成单元,其主要用于光刻机光路的分光与导向作用,因而其运动精度与稳定性具有严苛的要求。此外,通常情况下复眼单元至少包含两个自由度的旋转运动,因而在其研制过程中如何定量评估其各自由度方向的运动精度是其设计合理性的重要评价标准。
4.现阶段针对光刻机复眼单元运动误差标定装置研制的相关研究工作较少,这主要是由于光刻机复眼系统整体尺寸小、集成度高且测量方式局限导致的。激光干涉仪,尤其是双频激光干涉仪具有较高的测量精度并广泛用于精密仪器对检测中。研制一种基于激光干涉仪对复眼单元运动误差测量装置,对评估复眼单元对运动精度、环境相应与运动稳定性具有重要意义,在协助研制高精度光刻机复眼单元的同时,还可面向我国高端制造装备的重要需求,填补我国光刻机复眼单元误差测量装置的空白。
技术实现要素:
5.本发明为了解决现有技术中无法测量复眼单元在运动时的俯仰角和翻滚角误差,无法评估复眼单元工作时的运动精度与运动稳定性的问题,进而提供一种基于激光干涉仪的复眼单元运动误差测量装置;
6.一种基于激光干涉仪的复眼单元运动误差测量装置,所述测量装置包括基座、测量框架、复眼单元、第一干涉仪测量组和第二干涉仪测量组,所述测量框架设置在基座的上表面上,且测量框架与基座的上表面固定连接,复眼单元设置在测量框架中,且复眼单元位于测量框架的中心处,第一干涉仪测量组和第二干涉仪测量组均固定在测量框架的顶部,且第一干涉仪测量组和第二干涉仪测量组呈正交设置,第一干涉仪测量组和第二干涉仪测量组的测量部均与复眼单元对应设置;
7.进一步地,所述测量框架包括矩形框架体、十字支撑梁和四个支撑脚,四个支撑脚分别设置在矩形框架体下表面的四角处,每个支撑脚的顶端与矩形框架体的下表面固定连接,每个支撑脚的底端与基座上表面固定连接,十字支撑梁设置在矩形框架体中,且十字支
撑梁的中心点与矩形框架体的中心中心点对应设置,十字支撑梁的每端与矩形框架体中的一个侧边框固定连接;
8.进一步地,所述复眼单元包括安装法兰、驱动装置和光学元件,安装法兰设置在十字支撑梁的正下方,且安装法兰的中心点与十字支撑梁的中心点同轴设置,驱动装置的固定端安装在安装法兰上,光学元件安装在驱动装置的输出端上;
9.进一步地,所述第一干涉仪测量组包括两个一号干涉仪、两个一号入射分光镜和中心折射镜块,中心折射镜块固定安装在十字支撑梁上表面的中心处,两个一号入射分光镜沿横向对称设置在中心折射镜块的两侧,且每个一号入射分光镜与十字支撑梁中横向梁的上表面固定连接,每个一号干涉仪设置在一个一号入射分光镜与中心折射镜块之间,且每个一号干涉仪与十字支撑梁中横向梁的上表面固定连接,每个一号入射分光镜与一个一号干涉仪的入射端对应设置,每个一号干涉仪的发射端与中心折射镜块的一个入射口对应设置;
10.进一步地,所述中心折射镜块内置两块相背设置的一号折射镜,中心折射镜块外表面加工有两个入射口,每个入射口与一块一号折射镜对应设置;
11.进一步地,所述十字支撑梁的中心处加工有中心折射镜块安装嵌槽,中心折射镜块安装在中心折射镜块安装嵌槽中,中心折射镜块安装嵌槽的底部加工有一号透光孔,一号透光孔与光学元件对应设置;
12.进一步地,所述十字支撑梁中横向梁的上表面加工有两个一号干涉仪定位凹槽,每个一号干涉仪安装在一个一号干涉仪定位凹槽中;
13.进一步地,所述第二干涉仪测量组包括两个干涉仪测量单元,两个干涉仪测量单元沿纵向对称设置在中心折射镜块的两侧,且每个干涉仪测量单元与十字支撑梁中的纵向梁上表面固定连接;
14.进一步地,所述干涉仪测量单元包括二号干涉仪、二号入射分光镜和二号折射镜,二号入射分光镜、二号干涉仪和二号折射镜依次同轴设置,且二号入射分光镜、二号干涉仪和二号折射镜均与十字支撑梁中纵向梁的上表面固定连接,二号入射分光镜设置在二号干涉仪的入射端,二号干涉仪的发射端与和二号折射镜对应设置;
15.进一步地,所述十字支撑梁中纵向梁的上表面加工有两个二号折射镜放置凹槽,每个二号折射镜放置凹槽与一个二号折射镜对应设置,每个二号折射镜放置凹槽的底部加工有二号透光孔,且二号透光孔与与光学元件对应设置,每个二号折射镜安装在一个二号折射镜放置凹槽中,十字支撑梁中纵向梁的上表面还加工有两个二号干涉仪定位凹槽,每个二号干涉仪安装在一个一号干涉仪定位凹槽中。
16.本发明与现有技术相比具有以下有益效果:
17.本发明提供的一种基于激光干涉仪的复眼单元运动误差测量装置,填补我国光刻机复眼单元误差测量装置的空白。本发明利用激光干涉仪实现了对光刻机复眼单元在工作中的运动误差进行测量,同时所提出的测量装置中,两组干涉仪互不影响,可以相互独立完成误差的测量,通过第一干涉仪测量组反馈的距离信息,可以计算出延y轴的待测点在基准坐标系中延z轴的变化量,从而可以与待测点的理论空间位置做对比,得到当前光学元件翻滚角的偏差值,通过第二干涉仪测量组反馈的距离信息,可以计算出延x轴的待测点在基准坐标系中延z轴的变化量,从而可以与待测点的理论空间位置做对比,得到当前光学元件俯
仰角的偏差值,极大的提高了复眼单元运动误差测量的准确性和高精度性。
附图说明
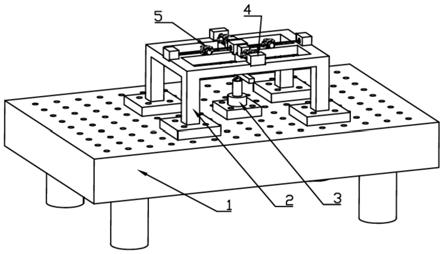
18.图1是本发明的总体结构图;
19.图2是本发明中复眼单元、第一干涉仪测量组、第二干涉仪测量组的结构示意图;
20.图3是本发明的俯视图;
21.图4是本发明中驱动装置的结构示意图;
22.图5是本发明中驱动装置的主剖示意图;
23.图6是本发明中驱动装置中输入端二维旋转铰链的结构示意图;
24.图7是本发明中驱动装置中直线补偿机构的结构示意图;
25.图中:1基座、2测量框架、3复眼单元、31安装法兰、32驱动装置、321外壳、322直线致动器、323输入端二维旋转铰链、324驱动杆、325直线补偿机构、3251输入端连接框、3253输出端连接框、3253四边形柔性直线运动机构、32531输入端运动块、32532输出端运动块、32533随动块、32534柔性弹簧拨片、325输入端二维旋转铰链、326输出端二维旋转铰链、327记忆合金应变恢复驱动装置、33光学元件、4第一干涉仪测量组、41一号干涉仪、42一号入射分光镜、43中心折射镜块、44一号入射光束、45一号测量光束、5第二干涉仪测量组、51二号干涉仪、52二号入射分光镜和53二号折射镜、54二号入射光束和55二号测量光束。
具体实施方式
26.具体实施方式一:参照图1至图3说明本实施方式,本实施方式提供一种基于激光干涉仪的复眼单元运动误差测量装置,其特征在于:所述测量装置包括基座1、测量框架2、复眼单元3、第一干涉仪测量组4和第二干涉仪测量组5,所述测量框架2设置在基座1的上表面上,且测量框架2与基座1的上表面固定连接,复眼单元3设置在测量框架2中,且复眼单元3位于测量框架2的中心处,第一干涉仪测量组4和第二干涉仪测量组5均固定在测量框架2的顶部,且第一干涉仪测量组4和第二干涉仪测量组5呈正交设置,第一干涉仪测量组4和第二干涉仪测量组5的测量部均与复眼单元3对应设置
27.本实施方式中,通过将复眼单元3设置在测量框架2与基座1之间,并利用位于测量框架2上的第一干涉仪测量组4和第二干涉仪测量组5对于位于测量框架2内的复眼单元3进行测量,通过第一干涉仪测量组4反馈的距离信息,可以计算出延y轴的待测点在基准坐标系中延z轴的变化量,从而可以与待测点的理论空间位置做对比,得到当前光学元件翻滚角的偏差值,通过第二干涉仪测量组5反馈的距离信息,可以计算出延x轴的待测点在基准坐标系中延z轴的变化量,从而可以与待测点的理论空间位置做对比,得到当前光学元件俯仰角的偏差值,极大的提高了复眼单元运动误差测量的准确性和高精度性。
28.具体实施方式二:参照图1至图3说明本实施方式,本实施方式是对具体实施方式一所述的测量框架2作进一步限定,本实施方式中,所述测量框架2包括矩形框架体、十字支撑梁和四个支撑脚,四个支撑脚分别设置在矩形框架体下表面的四角处,每个支撑脚的顶端与矩形框架体的下表面固定连接,每个支撑脚的底端与基座1上表面固定连接,十字支撑梁设置在矩形框架体中,且十字支撑梁的中心点与矩形框架体的中心中心点对应设置,十字支撑梁的每端与矩形框架体中的一个侧边框固定连接。其它组成及连接方式与具体实施
方式一相同。
29.本实施方式中,测量框架2作为主要的支撑结构主要用于支撑第一干涉仪测量组4和第二干涉仪测量组5。
30.具体实施方式三:参照图1至图3说明本实施方式,本实施方式是对具体实施方式一所述的复眼单元3作进一步限定,本实施方式中,所述复眼单元3包括安装法兰31、驱动装置32和光学元件33,安装法兰31设置在十字支撑梁的正下方,且安装法兰31的中心点与十字支撑梁的中心点同轴设置,驱动装置32的固定端安装在安装法兰31上,光学元件33安装在驱动装置32的输出端上。其它组成及连接方式与具体实施方式一相同。
31.本实施方式中,驱动装置32即为所要模拟的复眼结构,光学元件33作为用于测量进行接收和反馈光束的部件,驱动装置32主要可以驱动所述光学元件33绕两正交轴rx和ry轻微旋转,且在驱动装置32处于原位时,两正交轴所确定的平面与光学元件33的上表面重合,驱动装置32包括外壳321、直线致动器322、输入端二维旋转铰链323、驱动杆324、直线补偿机构325、输出端二维旋转铰链326和记忆合金应变恢复驱动装置327,所述直线制动器322固定在所述外壳321上,所述输入端二维旋转铰链323安装在直线制动器322上。所述驱动杆324的两端分别与输入端二维旋转铰链323和输出端二维旋转铰链326连接。所述直线补偿机构325布置在驱动杆324中部。所述输出端二维旋转铰链326的底端固定在外壳321上;
32.输入端二维旋转铰链323和输出端二维旋转铰链326的结构相同,都是由三个刚性支架组成,三个刚性支架之间通过记忆合金连接,位于顶部的刚性支架与位于中心的刚性支架配合实现了ry轴向的摆动,位于中心的刚性支架与位于底部的刚性支架配合实现了rx轴向的摆动,通过直线致动器322对输入端二维旋转铰链323中位于底部的刚性支架进行驱动,从而实现输入端二维旋转铰链323动作,随着二维旋转铰链323动作通过驱动杆324将其动作专递给输出端二维旋转铰链326同时带动位于输出端二维旋转铰链326上的光学元件33进行两个自由度的摆动(rx轴向的摆动和ry轴向的摆动),在测量时通过驱动装置32驱动光学元件33延x轴的待测点在基准坐标系中延z轴的变化量以及光学元件33延y轴的待测点在基准坐标系中延z轴的变化量,记忆合金应变恢复驱动装置327中包括柔性电热膜,贴附在输入端二维旋转铰链323中的记忆合金上,在工作中通过调整柔性电热膜的温度,进而控制记忆合金的形变,使输入端二维旋转铰链323在扭曲后恢复至初始状态;
33.进一步为了保证驱动杆324传递是的精度,在驱动杆324中设置了直线补偿机构325,直线补偿机构325是由输入端连接框3251、输出端连接框3252和四边形柔性直线运动机构3253组成,输入端连接框3251和输出端连接框3252通过四边形柔性直线运动机构3253连接,输入端连接框3251与驱动杆324中与输入端二维旋转铰链323的连接部相连,输出端连接框3252与驱动杆324中与输处端二维旋转铰链326的连接部相连,四边形柔性直线运动机构3253中包括输入端运动块32531、输出端运动块32532、两个随动块32533和多组柔性弹簧拨片32534组成,输入端运动块32531与输入端连接框3251相连,输出端运动块32532与输出端连接框3252相连,两个随动块32533设置在输入端运动块32531和输出端运动块32532两侧,且每个随动块32533与输入端运动块32531和输出端运动块32532之间通过柔性弹簧拨片32534相连,在柔性弹簧拨片32534的作用下,可以使输入端连接框3251和输出端连接框3252之间的相对位置发生柔性变化,进而对驱动杆324的长度进行补偿。
34.具体实施方式四:参照图1至图3说明本实施方式,本实施方式是对具体实施方式一所述的第一干涉仪测量组4作进一步限定,本实施方式中,所述第一干涉仪测量组4包括两个一号干涉仪41、两个一号入射分光镜42和中心折射镜块43,中心折射镜块43固定安装在十字支撑梁上表面的中心处,两个一号入射分光镜42沿横向对称设置在中心折射镜块43的两侧,且每个一号入射分光镜42与十字支撑梁中横向梁的上表面固定连接,每个一号干涉仪41设置在一个一号入射分光镜42与中心折射镜块43之间,且每个一号干涉仪41与十字支撑梁中横向梁的上表面固定连接,每个一号入射分光镜42与一个一号干涉仪41的入射端对应设置,每个一号干涉仪41的发射端与中心折射镜块43的一个入射口对应设置。其它组成及连接方式与具体实施方式一相同。
35.具体实施方式五:参照图1至图3说明本实施方式,本实施方式是对具体实施方式四所述的中心折射镜块43作进一步限定,本实施方式中,所述中心折射镜块43内置两块相背设置的一号折射镜,中心折射镜块43外表面加工有两个入射口,每个入射口与一块一号折射镜对应设置。其它组成及连接方式与具体实施方式四相同。
36.本实施方式中,一号折射镜为45
°
折射镜。
37.具体实施方式六:参照图1至图3说明本实施方式,本实施方式是对具体实施方式四所述的十字支撑梁作进一步限定,本实施方式中,所述十字支撑梁的中心处加工有中心折射镜块安装嵌槽,中心折射镜块43安装在中心折射镜块安装嵌槽中,中心折射镜块安装嵌槽的底部加工有一号透光孔,一号透光孔与光学元件33对应设置。其它组成及连接方式与具体实施方式四相同。
38.如此设置,通过中心折射镜块安装嵌槽对中心折射镜块43进行限位,同时通过一号透光孔将经过折射后的测量光束准确的射在光学元件33上。
39.具体实施方式七:参照图1至图3说明本实施方式,本实施方式是对具体实施方式四所述的十字支撑梁作进一步限定,本实施方式中,所述十字支撑梁中横向梁的上表面加工有两个一号干涉仪定位凹槽,每个一号干涉仪41安装在一个一号干涉仪定位凹槽中。其它组成及连接方式与具体实施方式四相同。
40.如此设置,通过一号干涉仪定位凹槽对位于十字支撑梁中横向梁上的两个一号干涉仪41进行安装定位。
41.具体实施方式八:参照图1至图3说明本实施方式,本实施方式是对具体实施方式一所述的第二干涉仪测量组5作进一步限定,本实施方式中,所述第二干涉仪测量组5包括两个干涉仪测量单元,两个干涉仪测量单元沿纵向对称设置在中心折射镜块43的两侧,且每个干涉仪测量单元与十字支撑梁中的纵向梁上表面固定连接。其它组成及连接方式与具体实施方式一相同。
42.具体实施方式九:参照图1至图3说明本实施方式,本实施方式是对具体实施方式八所述的干涉仪测量单元作进一步限定,本实施方式中,所述干涉仪测量单元包括二号干涉仪51、二号入射分光镜52和二号折射镜53,二号入射分光镜52、二号干涉仪51和二号折射镜53依次同轴设置,且二号入射分光镜52、二号干涉仪51和二号折射镜53均与十字支撑梁中纵向梁的上表面固定连接,二号入射分光镜52设置在二号干涉仪51的入射端,二号干涉仪51的发射端与和二号折射镜53对应设置其它组成及连接方式与具体实施方式八相同。
43.本实施方式中,二号折射镜53为45
°
折射镜。
44.具体实施方式十:参照图1至图3说明本实施方式,本实施方式是对具体实施方式九所述的十字支撑梁作进一步限定,本实施方式中,所述十字支撑梁中纵向梁的上表面加工有两个二号折射镜放置凹槽,每个二号折射镜放置凹槽与一个二号折射镜53对应设置,每个二号折射镜放置凹槽的底部加工有二号透光孔,且二号透光孔与与光学元件33对应设置,每个二号折射镜53安装在一个二号折射镜放置凹槽中,十字支撑梁中纵向梁的上表面还加工有两个二号干涉仪定位凹槽,每个二号干涉仪51安装在一个一号干涉仪定位凹槽中。其它组成及连接方式与具体实施方式九相同。
45.如此设置,通过二号折射镜放置凹槽对二号折射镜53进行限位,同时通过二号透光孔将经过折射后的测量光束准确的射在光学元件33上,通过二号干涉仪定位凹槽对位于十字支撑梁中横向梁上的两个二号干涉仪51进行安装定位。
46.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,但是凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施案例所做的任何简单修改、等同变化与修饰,均仍属本发明技术方案范围。
47.工作原理
48.本发明在工作时,首先将各个部件根据具体实施方式一至具体实施方式十中的连接方式组装好,通过外部光源对两个一号入射分光镜42的入射角和两个二号入射分光镜52入射角发射光束,通过光源发射的光束经过一号入射分光镜42和二号入射分光镜52进行分光,通过一号入射分光镜42进入到一号干涉仪41入射端的光束为一号入射光束44,一号入射光束44在经过一号干涉仪41后变为一号测量光束45并从一号干涉仪41的发射端射向中心折射镜块43中的一号折射镜,一号折射镜将一号测量光束45折射到光学元件33上,再由光学元件33将该一号测量光束45进行反射回对应的一号干涉仪41,由对应的一号干涉仪41进行接收,通过第一干涉仪测量组4反馈的距离信息,可以计算出延y轴的待测点在基准坐标系中延z轴的变化量,从而可以与待测点的理论空间位置做对比,得到当前光学元件33翻滚角的偏差值,通过二号入射分光镜52进入到二号干涉仪51入射端的光束为二号入射光束54,二号入射光束54在经过二号干涉仪51后变为二号测量光束55并从二号干涉仪51的发射端射向对应的二号折射镜53,二号折射镜53将二号测量光束55折射到光学元件33上,再由光学元件33将该二号测量光束55进行反射回对应的二号干涉仪51,由对应的二号干涉仪51进行接收,通过第二干涉仪测量组5反馈的距离信息,可以计算出延x轴的待测点在基准坐标系中延z轴的变化量,从而可以与待测点的理论空间位置做对比,得到当前光学元件33俯仰角的偏差值,根据在复眼单元3运动时由第一干涉仪测量组4和第二干涉仪测量组5反馈的数据可以获得所述复眼单元3的运动误差数据,为标定提供支持;
49.在进行测量时,通过驱动装置32来驱动光学元件33进行两自由度的摆动(rx轴向的摆动和ry轴向的摆动),随着光学元件33在rx轴向的摆动来实现光学元件33延x轴的待测点在基准坐标系中延z轴的变化量,随着光学元件33在ry轴向的摆动来实现光学元件33延y轴的待测点在基准坐标系中延z轴的变化量,从而实现测量复眼单元在运动时的俯仰角和翻滚角误差。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
