1.本技术涉及自动化设备领域,尤其涉及一种液位式自动水平机构。
背景技术:
2.随着科学技术的快速发展,在工业仪器设备以及各种精密机械仪器的使用中,对于所使用平台的水平度要求越来越高。但是目前的高精度水平支撑系统价格高昂;而且大部分水平支撑系统的水平调节都需要手动进行;调整精度低,调节效率较低;而且手动调节的反应及时性差,不能随时根据倾斜状态的变化情况,快速的将系统恢复到水平状态下。基于以上所述,急需一种使用便捷的高精度水平调节机构。
技术实现要素:
3.为了解决现有技术中存在的问题,本技术提供了一种液位式自动水平机构。
4.本技术具体技术方案如下:
5.一种液位式自动水平机构,所述水平机构包括支撑底盘,在支撑底盘上设置有:
6.调节器,所述调节器设置有多个,所述调节器均匀分布在支撑底盘上;
7.水平液位测定器,所述水平液位测定器固接在所述支撑底盘上;
8.控制器,所述控制器分别与水平液位测定器和调节器连接,所述控制器能够根据水平液位测定器的检测结果来控制调节器的运动;
9.其中,所述水平液位测定器包括多个压力传感器,所述压力传感器均匀设置在所述支撑底盘远离中心的位置,在支撑底盘上设置有存有液体的管道,所述管道分别与所述压力传感器连接,所述压力传感器与管道内液体接触。
10.在一个具体实施方式中,所述调节器设置有至少三个,所述调节器中至少有一个可以与剩余调节器中的任意两个调节器共同呈三角形排布。
11.在一个具体实施方式中,所述调节器一共设置有三个,三个所述调节器呈等边三角形或等腰三角形排布。
12.在一个具体实施方式中,所述压力传感器设置在支撑底盘靠近边缘的位置,所述管道铺设在所述支撑底盘的表面上。
13.在一个具体实施方式中,所述压力传感器设置与调节器一一对应设置有三个,三个压力传感器呈等边三角形或等腰三角形设置在与调节器相对应的位置。
14.在一个具体实施方式中,所述压力传感器均与所述控制器连接,所述调节器均与控制器连接。
15.在一个具体实施方式中,所述支撑底盘上与调节器相对应的位置处分别开设有安装通孔,所述调节器从所述安装通孔中穿过所述支撑底盘。
16.在一个具体实施方式中,在所述支撑底座上设置有水准泡。
17.有益效果
18.本技术的液位式自动水平机构,本技术的液位式自动水平机构,能够实时检测支
撑底盘的水平位置,并且能够根据检测到的水平位置信息自身进行调整,使支撑底盘始终处于水平位置。
附图说明
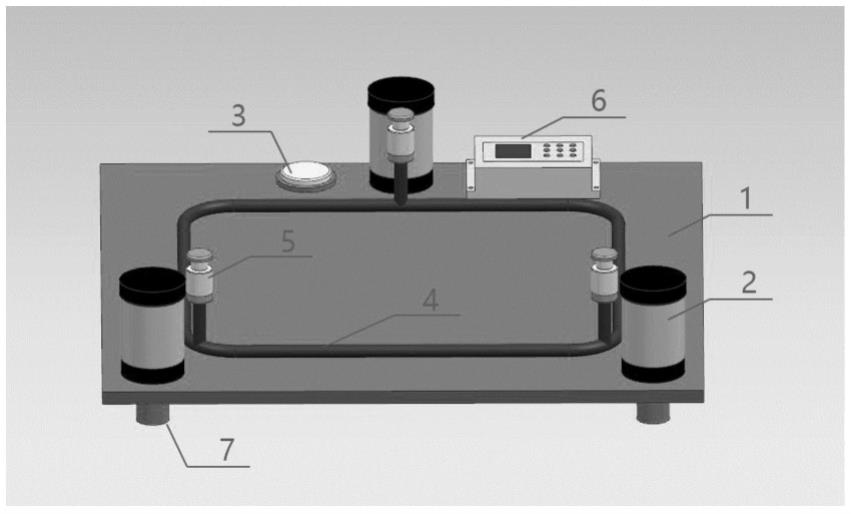
19.图1是本技术水平机构的整体结构示意图。
20.图中,1、支撑底盘;2、调节器;3、水准泡;4、管道;5、压力传感器;6、控制器;7、调节推杆。
具体实施方式
21.下面对本技术做以详细说明。虽然显示了本技术的具体实施例,然而应当理解,可以以各种形式实现本技术而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本技术,并且能够将本技术的范围完整的传达给本领域的技术人员。
22.需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本技术的较佳实施方式,然而所述描述乃以说明书的一般原则为目的,并非用以限定本技术的范围。本技术的保护范围当视所附权利要求所界定者为准。
23.参考图1,本技术提供了一种液位式自动水平机构,所述水平机构包括支撑底盘1,在支撑底盘1上设置有:
24.调节器2,所述调节器2设置有三个及以上,所述调节器2均匀分布在支撑底盘1上;
25.水平液位测定器,所述水平液位测定器固接在所述支撑底盘1上;
26.控制器6,所述控制器6分别与水平液位测定器和调节器2连接,所述控制器6能够根据水平液位测定器的检测结果来控制调节器2的运动;
27.其中,所述水平液位测定器包括多个压力传感器5,所述压力传感器5均匀设置在所述支撑底盘1远离中心的位置,在支撑底盘1上设置有存有液体的管道4,所述管道4分别与所述压力传感器5连接,所述压力传感器5与管道4内液体接触。
28.所述调节器2的均匀分布是指,所述调节器2沿着支撑底盘1的中心均匀排布,即所述调节器2所排布形状的中心位于所述支撑底盘1的中心处。
29.所述支撑底盘1为方形板状,所述多个调节器2均匀排布在支撑底盘1上,当支撑底盘1在水平方向上发生偏移时,支撑推杆将会根据偏移方向,向偏移的反方向推动支撑底盘1,进而使支撑底盘1回归水平位置。
30.水平液位测定器用于检测支撑底盘1的水平位置,当水平液位测定器检测到支撑底盘1偏移水平面之后,会将检测信号传输给控制器6,而后控制器6会根据水平液位测定器的检测信号去控制调节器2的伸缩,进而将支撑底盘1调整到水平位置。
31.由于液体的流动性,因此在重力作用下,液体的上表面始终会有流动到水平面的趋势,基于此原理,通过压力传感器5来检测管道4内部液体在不同位置的液压,当管道4内部多处位置的液压相等时,说明与管道4固接的支撑底盘1位于水平面,而如果压力传感器5
检测的液压存在不同说明支撑底盘1偏离了水平位置。
32.所述调节器2设置有至少三个,所述调节器2中至少有一个可以与剩余调节器2中的任意两个调节器2共同呈三角形排布。
33.由于三个不共线的点确定一个平面,因此需要至少有三个不共线排布的调节器2固接在支撑底盘1上,即至少一个调节器2可以与其他任意两个调节器2呈三角形排布。所述调节器2在伸缩时,会带动支撑底盘1进行移动,当调节器2与支撑底盘1之间固接的相对接触点同时处于水平面时,支撑底盘1将会稳定在水平位置。
34.所述调节器2一共设置有三个,三个所述调节器2呈等边三角形或等腰三角形排布。
35.优选的,调节器2设置有三个即可。为了使支撑底盘1在调节时,可以更加稳定,降低支撑底盘1发生翻转的可能性,因此将调节器2呈等腰三角形或等边三角形分布,并且呈等腰三角形排布时所述等腰三角形的底边位于支撑底盘1较长边的一侧,这样使得支撑底盘1在被调节器2调整时,支撑底盘1在长度方向上的两侧受力处于相对的对称状态,进而达到降低支撑底盘1发生侧翻可能性的目的。
36.所述压力传感器5设置在支撑底盘1靠近边缘的位置,所述管道4铺设在所述支撑底盘1的表面上。
37.所述管道4同样均匀铺设在支撑地盘上,所述管道4从支撑底盘1上靠近边缘的位置经过,当支撑底盘1发生偏移时,管道4内部的液体会从偏移到高于水平面的位置向下流动,这样就使得管道4内部的液体的压力产生改变,而与管道4内部液体接触的压力传感器5检测到液体压力的变化,此时说明支撑底盘1已经偏离了水平位置。
38.所述管道4内部充满了液体,并且管道4和压力传感器5之间保持密封,使得液体密封在管道4内部。因此当支撑底盘1发生偏移时,管道4内部的液体并未流动,但是此时管道4内部的液体存在了倾斜,使得位于下方的液体会受到位于上方液体的压力,因此会使得偏移到下方的管道4内部的液体压力会变大,而位于上方位置的液体压力会减小。
39.所述压力传感器5设置与调节器2一一对应设置有三个,三个压力传感器5呈等边三角形或等腰三角形设置在与调节器2相对应的位置。
40.所述压力传感器5与调节器2的个数相等,这样使得调节器2在对支撑底盘1进行调节时,可以根据与之对应的压力传感器5所检测到的信号进行调整,这样一一对应,使控制器6可以处理较少的数据来实现对支撑底盘1水平位置的控制,更进一步的,所述压力传感器5也可以设置有多个,多个压力传感器5可以更精准的检测出支撑底盘1的水平性,可以更加明确的检测到支撑底盘1具体位置上偏或下移的情况,会使得调整器在调整时可以做出更精准的调整动作。
41.优选压力传感器5和调节器2均为三个,因此三个不共线的压力传感器5即可实现对支撑底盘1的水平位置的检测,同样三个调节器2即可实现对支撑底盘1水平位置的调整,并且少量的压力传感器5和调节器2会使得控制器6更容易计算,能够降低控制器6出现计算错误的可能性,进而可以提高水平机构的使用稳定性。
42.所述管道4沿着支撑底盘1靠近边缘的位置呈环状固接在所述支撑底盘1上,所述三个压力传感器5均与所述管道4连通,并且所述三个压力传感器5位于同一平面内,并且所述三个压力传感器5所在平面与支撑底盘1所在平面相平行。
43.所述压力传感器5均与所述控制器6连接,所述调节器2均与控制器6连接。
44.压力传感器5所检测到的压力信号会传输给控制器6,而后控制器6将压力信号计算后,控制调节器2伸缩,将支撑底盘1调整到水平位置。
45.所述支撑底盘1上与调节器2相对应的位置处分别开设有安装通孔,所述调节器2从所述安装通孔中穿过所述支撑底盘1。
46.所述调节器2包括壳体部和调节推杆7,所述壳体部固接在所述支撑底盘1上,所述调节推杆7设置在所述安装通孔内部,所述调节推杆7通过安装通孔贯穿支撑底盘1,将调节器2的壳体部设置在支撑底盘1的上表面,方便与同样设置在支撑底盘1上表面上的控制器6连接,此外,将调节器2的壳体部设置在支撑底盘1的上表面上方便对调节器2壳体部的维修或调整。
47.在所述支撑底座上设置有水准泡3。
48.所述水准泡3用于校正所述压力传感器5的参数,在使用本技术中的水平装置时,通过水准泡3将支撑底盘1和三个压力传感器5进行校准使其位于水平面内,而后通过调整控制器6使压力传感器5测量的液压信号归零,即在起始时通过水准泡3定位水平面,并将压力传感器5在此状态下测量的液压信号强度定义为零点,当支撑底盘1、压力传感器5、管道4和管道4内部的液体偏转水平面时,压力传感器5检测到的液压信号变强或变弱均与起始状态的零点作对比,而后控制器6将即时检测到的液压信号进行处理,而后控制调节器2伸缩,直至压力传感器5所检测到的信号归零为止,此时支撑底盘1处于水平状态。
49.综上所述,本技术的水平装置的使用方法为,当使用本技术的水平装置时,先通过观察水准泡3将支撑底盘1设置在水平位置,此时,压力传感器5检测到的管道4内部的液压信号相同,而后调整控制器6,将此时压力传感器5检测到的液压信号定义为零点;当支撑底盘1发生偏移时,会使得压力传感器5检测到的液压信号发生改变,而后压力传感器5会将检测到的液压信号传递给控制器6,控制器6将即时检测到的液压信号和零点液压信号做对比,而后根据对比结果去控制调节器2的伸缩,直至压力传感器5检测到的液压信号与起始时相等,此时,支撑底盘1回归到了水平位置。
50.本具体实施例仅仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。