1.本发明及康复训练设备技术领域,具体来说是一种基于仿真力学平衡的多功能康复训练助行车。
背景技术:
2.如今老年化问题越来越严重,其中更为普及的是对有人陪护的需求越来越高,而最为显著的现象就是老年人都会“步履蹒跚”;很多外科手术后的病人及残疾人(步行困难)的康复都需要人陪护。目前能够照顾他们的专业人员有限,且很耗费精力。本发明要制作出一个步行辅助小车,帮助腿脚不便的人步行康复。步行辅助小车的扶手具有搀扶效果,并携带语音、储物、休息、定位、呼叫(紧急情况联系医生或亲人)等功能,用以代替专人的搀扶与看护。
3.国内目前有很多肢体康复器材,但都局限于模拟人局部肢体的运动,从而起到康复作用。若人想要走动,仍然需要借助他人的搀扶或借助专门的支架支撑来行走(行走较为吃力,行走时间太长不利于人的腿部康复)。本世纪以来,已经出现了康复训练机器人和辅助型康复机器人。康复训练机器人侧重于重复某一个肢体动作,从而刺激控制肢体的运动神经,达到修复人的身体的目的,并没有辅助使用者步行的功能。
4.虽然国内外的辅助型康复机器人的研究近年来取得一定的成果(辅助型康复机器人主要用来帮助肢体运动有困难的患者来完成一系列的肢体运动),但在这方面国内的研究目前刚刚起步,研究成果较少,且辅助型康复机器人与康复训练机器人仍然有很多共同的特点,大多数依然侧重于完成动作,而不是辅助使用者的行动。如果用户需要外出,依然需要他人的帮助。就目前来说国内还没有半自动化助行车。
5.如公告号为cn215274330u公开的实用新型专利,该专利公开一种多功能康复助行车,集合行走和座椅功能,不具有智能检测功能,更不具有速度跟随功能。
技术实现要素:
6.本发明所要解决的技术问题在于如何提高康复训练助行车的自动跟随性能。
7.本发明通过以下技术手段实现解决上述技术问题的:
8.基于仿真力学平衡的多功能康复训练助行车,包括行车本体、左右驱动轮、左右驱动单元、监控模块;所述左右驱动单元分别驱动左右驱动轮转动;
9.所述监控模块包括用于检测驱动左右驱动轮转速的转速检测单元、用于行驶控制的控制单元;所述控制单元接受转速检测单元发送的左右驱动轮的转速,并计算转速差,从而获得使用者意图,从而控制驱动单元驱动对应的驱动轮完成速度控制。
10.本发明采用两个独立控制的驱动轮,进而实现速度跟随,提高助行车与使用者的配合度,进一步降低身体素质较差的使用者的体力消耗,减少使用者发生意外。
11.进一步的,所述速度跟随模式下的速度控制的具体过程为:
12.助行车的速度选择的挡位为p,(q-1)、q、(q 1)档的标准设定速度为v1m/s,vm/
sv2m/s,且满足v
2-δv=v=v1 δv,当实际速度满足
[0013][0014]
设定使用者当前处于p档速,设定的左右驱动轮的标准速度为v,助行车的实际左驱动轮速度为实际右驱动轮速度为允许的速度修正误差系数是m,判定助行车进入自动转弯环节的转弯倾向判定系数是k,q档速的设定的左右两轮的标准速度为vq,每相邻的两个速度挡位的速度差值为固定值δv;
[0015]
1)首先判定是否速度跟随,如果未开启速度跟随,则跳过此环节。
[0016]
如果满足
[0017][0018]
此时将挡位修正到q挡位上来,速度修正为
[0019][0020]
如果满足
[0021][0022]
或满足
[0023][0024]
此时助行车优先将挡位调节到q挡位,并将两驱动轮的速度调整为vq,再根据后续的使用者操作做出判断;
[0025]
如果满足
[0026][0027]
或满足
[0028][0029]
此时由于两边速度一边接近vq,一边接近v
q 1
,此时判定存在外界干扰因素影响,跳过速度跟随环节,优先将两边速度修正为v;
[0030]
如果满足
[0031][0032]
或满足
[0033][0034]
此时由于两边驱动轮速度一边接近vq,一边接近v
q-1
,此时判定存在外界干扰因素影响,跳过速度跟随环节,优先将两边速度修正为v。
[0035]
2)在速度跟随或跳过速度跟随后若有
[0036][0037]
此时小车进入速度修正环节,将速度修正为
[0038][0039]
3)在速度修正后,如果速度满足(默认当前挡位的标准速度为v)
[0040][0041]
或满足
[0042][0043]
此时助行车进入自动右转弯环节,将速度修正为
[0044][0045]
持续转向的时间为δt,此后重新进入直行环节,满足
[0046][0047]
或是在第一步速度修正后,如果速度满足
[0048][0049]
或满足
[0050][0051]
此时助行车进入自动左转弯环节,将速度修正为
[0052][0053]
持续转向的时间为δt,此后重新进入直行环节,满足
[0054][0055]
进一步的,所述监控模块还包括脱把检测单元、障碍物检测单元、紧急刹车单元;所述脱把检测单元、障碍物检测单元、紧急刹车单元均与控制单元通信连接;所述脱把检测单元监测使用者是否脱离扶手,所述障碍物检测单元监测行进路径上是否有障碍物,所述控制单元根据脱把检测单元、障碍物检测单元发送的信号控制紧急刹车单元动作。
[0056]
进一步的,所述脱把检测单元包括固定在助行车把手上的光敏传感器;所述光敏传感器与控制单元通信连接。
[0057]
进一步的,所述紧急刹车单元为固定在左右驱动轮上的电磁抱闸。
[0058]
进一步的,还包括升降扶手,所述升降扶手为两个,分别安装在行车本体的左右两侧;所述升降扶手包括升降架,左右两个升降架的顶部固定有手臂托;两个所述升降架的前端通过横杆连接,在横杆上固定有控制面板,所述控制面板上设置有档位选项、是否速度跟随选项。
[0059]
进一步的,在所述升降架的前端设计有把手和手刹。
[0060]
进一步的,所述转速检测单元采用光电编码器对左右驱动轮进行转速检测。
[0061]
进一步的,在所述行车本体的左右两侧分别固定有第一折叠辅助轮。
[0062]
进一步的,所述折叠辅助轮包括与第一折叠架、连杆;所述第一折叠架与所述升降
架转动连接;所述升降架包括加强梁;所述连杆一端与加强梁转动连接,另一端与所述第一折叠架可拆卸连接。
[0063]
进一步的,所述行车本体的左右两侧分别固定有第二折叠辅助轮。
[0064]
进一步的,所述第二折叠辅助轮包括第二折叠架、定位销,所述第二折叠架与所述升降架转动连接;所述定位销一端与第二折叠架转动连接,另一端与所述升降架上设置的搭扣扣接。
[0065]
本发明的优点在于:
[0066]
本发明采用连个独立控制的驱动轮,根据两个驱动轮的转速差,可判断使用者意图,进而实现自动跟随,提高助行车与使用者的配合度,减少使用者发生意外。
[0067]
本发明通过使用者首先有转弯的动作使左右驱动轮的存在转速差,根据转速差判断使用者转弯意图及转弯的方向。设定每次转弯角度和转弯时长固定,通常情况下一次自动转弯不能满足用户的转弯需求,所以会出现多次转弯的合成,从而较为精准的达到使用者希望的转弯效果,避免出现过度转弯。
[0068]
本实用新型采用升降扶手,可适应不同身高的使用者,提高使用者的使用舒适度。手臂托支撑使用者小臂,可减少手腕的疲劳度,延长训练时长。采用可折叠的辅助轮,便于收纳。
[0069]
通过在把手上设置的光敏感传感器,系统可及时发现使用者是否脱把,实现紧急刹车,减少对使用者的伤害。
附图说明
[0070]
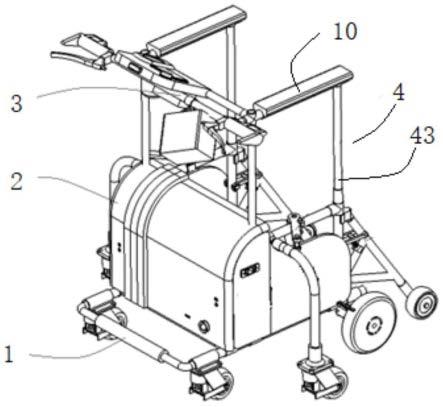
图1为本发明实施例中助行车的整体结构示意图;
[0071]
图2为本发明实施例中助行车的右升降扶手的竖向剖面结构示意图;
[0072]
图3为图2中a部放大结构示意图;
[0073]
图4为本发明实施例中助行车的座椅结构示意图;
[0074]
图5为本发明实施例中助行车的控制面板及把手刹车的结构示意图;
[0075]
图6为本发明实施例中助行车前下方设计的设备箱的外观结构示意图;
[0076]
图7为图6中设备箱去除外壳的结构示意图;
[0077]
图8为本发明实施例中助行车中第一折叠辅助轮的结构示意图;
[0078]
图9为本发明实施例中助行车中第二折叠辅助轮的结构示意图;
[0079]
图10为本发明实施例中助行车中驱动轮在经历一次
△
t的转向轨迹示意图;
[0080]
图11为本发明实施例中助行车中驱动轮在经历多次转向轨迹示意图;
[0081]
图12为本发明实施例中助行车的电气功能图;
[0082]
图13为本发明实施例中助行车的功能模块图;
[0083]
图14为本发明实施例中助行车的非紧急手刹、非速度跟随下的速度修正流程图;
[0084]
图15为本发明实施例中助行车的通讯模块实现方法图;
[0085]
图16为本发明实施例中助行车的触摸屏显示与操控图。
具体实施方式
[0086]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,
对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0087]
本实施例提供是一种高安全性、稳定性、可折叠的助步车。图1为全折叠时的外形示意图,整体外形仿真于行李箱,使用者可通过拉动拉杆1拖动该助步车,使助行车携带性得到提高。助行车的具体结构如下:
[0088]
包括车本体,在车本体底部安装有左右驱动轮,两个驱动轮分别由左右驱动单元单独驱动,除驱动轮外,还设置有至少一组辅助轮,本实例设置了两组辅助轮,提高了助行车的稳定性,且辅助轮均可折叠置于收纳盒中。另外还在车本体上设置有可升降扶手,便于根据不同使用者身高来调整扶手的高度。
[0089]
如图1所示,车主体包括底架(图1中被外部框架遮挡),底架为采用金属管焊接或采用螺栓连接而成的u型架,底架的u形开口的位置为使用者站立的位置。在底架的底部固定左右驱动轮和左右从动轮,左右驱动单元也固定在底架上,从而形成一个可驱动的主体。在底架两侧分别固定升降扶手,包括升降架和顶部的手臂托10,升降架整体为倒u形架体,顶部固定柔性手臂托10,用以支撑使用者小臂。如图2所示,升降架包括顶部的操作横杆和固定在操作横杆两端的两伸缩竖杆43;操作横杆包括套筒40,套筒40内套有压杆41,压杆41底部设置有第一弹簧42,在升降架固定在某一高度时,第一弹簧42顶着压杆41位于套筒40顶部。在套筒40上安装有按钮36,按钮36整体为楔形,按钮36的楔形前端位于压杆41和套筒40顶壁之间。当使用者按压按钮36时,楔形按钮36挤压压杆41向下运动。如图3所示,伸缩竖杆43包括依次套设的外杆430、中杆431、内杆432;中杆431底部为盲端。在中杆431底部放置有滑块433,滑块433一侧固定有销轴435,另一侧与内杆432壁之间限位有第二弹簧435,滑块433上设置有斜槽,内杆432底端设置有与斜槽配合的滑键。中杆431和外杆430上竖向开有多个孔,销轴435插入中杆431和外杆430对应的孔可以定位升降架的高度。压杆41的两端分别与两个对应的内杆432底部固定,当使用者按压按钮36是,按钮36的楔块挤压压杆向下遇到,压杆两端挤压内杆432向下运动,在滑键与斜槽的配合下,滑块433向第二弹簧434方向平移,带动销轴435从外杆430和中杆431的孔中抽出,此时可以调整升降架的高度,当调节到合适高度后,松开按钮36,压杆在第一弹簧42的作用下复位,滑块433在第二弹簧434作用下复位,销轴435插入中杆431、外杆430对应的孔,从而锁定升降架的高度。
[0090]
如图5所示,在左右两个升降架的前端固定有两根横梁,用以固定控制面板33、座椅,以及悬挂储物篮34等部件。如图4所示,座椅由电动推杆71伸缩实现座椅72的展开和折叠,座椅72转动固定在上方的横梁上,电动推杆71的一端固定在下方的横梁上,输出端与座椅下表面转动连接,驱动电动推杆71即可实现座椅的收起展开,操作便捷。当使用者累了需要休息时,展开座椅7即可坐下休息。手臂托10的前端还设置有把手31和手刹32,便于使用者在紧急情况下刹车。在左右升降架的中底部还采用铁片或其他材质板材围合成一个电控箱,如图6、图7所示的电控前箱内外部结构,其前板251上安装有usb口21,外部数据线可通过此口连接到内部stm32开发板上,进行代码程序的传输。此外还有小喇叭22,内连语音模块263,可进行语音播报。有红外测距模块23,可检测前方障碍物。其侧板251上有电源充电口24,可对内置电源进行充电。当去掉前板252,可看到箱体内部的电子元件26,包括stm32开发板261,备用ad转换器262,语音模块263,cat1联网通讯模块264,gps定位模块265,直流
无刷电机驱动板266、锂电池267和电量检测模块268。
[0091]
在左右升降架的两侧分别固定有第一折叠辅助轮和第二折叠辅助轮。如图8所示,第一折叠辅助轮包括第一折叠架51、连杆52;第一折叠架51大体成l性,顶部与升降架前端的伸缩竖杆43转动固定,底部安装有辅助轮。前后两个伸缩竖杆43之间连接加强梁,连杆52一端与加强梁转动连接,另一端与第一折叠架51采用扣接方式连接,当需要打开时,转动第一折叠架51至外侧,将连杆52与第一折叠架51上的搭扣固定,从而可以使第一折叠架51位置锁定。收起是逆向操作即可将第一折叠架51收至贴合升降架外侧。
[0092]
如图9所示,第二折叠辅助轮包括第二折叠架61和定位销62;第二折叠架61的顶部与升降架后端的升降竖杆43转动连接,底端固定有辅助轮。第二折叠架61为斜杆,与伸缩竖杆43呈夹角设置,定位销62一端转动连接在第二折叠架61上,另一端与伸缩竖杆43上的搭扣卡接,从而可以锁定第二折叠架61的位置。当需要收起时,将定位销62与伸缩竖杆43上的搭扣解除,向内侧转动第二折叠架61即收纳至底架的u形腔内。
[0093]
如图12所示,图12为本实施例助行车的电气功能图,从图中可以看出,助行车除机械结构外,还包括通信模块、定位模块、语音模块、行驶模块、传感器模块,以上模块均与单片机通信连接,从而实现使用过程中脱把检测、紧急刹车、障碍物检测、速度跟随、转弯、速度修正等功能。
[0094]
脱把检测:
[0095]
在把手31上安装有光敏感传感器37,当使用者双手握紧把手31时遮挡光敏感传感器37,则判定正常,当手脱离光敏感传感器37,则判定脱把,会紧急刹车。光敏感传感器37的安装位置满足正常使用时,使用者的手能够覆盖光敏感传感器37。当然,还可以在把手31上安装心率传感器等用以检测使用者生命体征的传感器。以及安装温湿度传感器等环境检测。
[0096]
紧急刹车:
[0097]
本实施例通过在两个驱动轮上安装电磁抱闸,当出现意外情况时,助行车会紧急刹车,使电机停止转动,同时机械机构锁死驱动轮。以下给出紧急刹车出现情况:
[0098]
(1)使用者认为有突发情况时,主动拉下机械手刹32。
[0099]
机械手刹32被拉下后,车体速度产生较大波动,光电编码器检测速度极不正常,输出信号给控制单元,本实施例中的控制单元为单片机,单片机控制电机控制板,使助行车电机停转,进入0档速(电机停止转动,但不会锁死)。机械手刹32被拉下,机械机构已经锁死驱动轮,整个系统完成紧急刹车。
[0100]
(2)速度失控时,使用者无法操作手刹时,启动强制刹车。
[0101]
助行车需要车速检测模块去检测车速是否达到系统设置的速度上限(以启动紧强制降速)并实时检测车速。对于车速的检测,助行车利用光电编码器检测轮胎的转速,进而测出实际的车速。光电编码传感器利用机械运动造成的光照变化,换算出具体的机械运动数据。光电编码器主要由光栅盘和光电检测装置构成,当电机转动时,光栅盘与电机同轴转动,此时光电检测装置将检测到光线并且输出多个脉冲信号,通过判断该信号每秒的脉冲数便可判断电机的转速,进而判断小车的速度。
[0102]
助行车的两个前驱动轮上安装有光电编码器,可分别测出左右两个驱动轮的实际转速,为驱动系统服务。
[0103]
(3)使用者两只手都脱离手柄时,判定出现危险情况。
[0104]
当两边把手31的光照传感器都接收到较强光信号时,说明使用者两手都未握住把手31,单片机接收到光照传感器的信号,使电机停转,机械结构锁死,完成紧急刹车。
[0105]
(4)当红外检测装置检测到前方进入危险距离后,会自动将人为选择的速度挡位强制变为0档速。
[0106]
当红外传感器检测到前方障碍物距离车体过近,可能有意外情况,单片机予以车体强制刹车,同时语音播报前方存在障碍物。
[0107]
障碍物检测模块:
[0108]
在助行车前端固定测距传感器,当助行车与障碍物达到一定的距离时,语音播报系统会提醒使用者,助行车紧急刹车以防止撞上障碍物。传感测距模块利用红外传感测距,采用三角测量原理,红外传感器发出一束红外线,当红外线碰触到物体时反射回传感器的接收部分,并且由传感器将光信号转化为电压信号,通过判断电压的大小即可判断物体与传感器的距离。
[0109]
助行车安装有两个红外传感器,分别在小车的前方以中轴线对称处安装。当单片机从数据接口接收到红外传感器的信号,将向语音模块发出指令使其播报语音提醒使用者。当助行车与障碍物距离小于一定值时,整个助行车会紧急刹车。
[0110]
自动辅助行驶:
[0111]
控制面板33上显示非速度跟随模式、速度跟随模式、辅助转弯模式三个选项,可根据使用者需求自主选择。以下分别介绍这两种功能。
[0112]
非速度跟随模式:
[0113]
当使用者需要助行车对其提供前进的动力时,可依据个人情况选择1-5的速度挡位。在电机转动过程中,需要不断检测电机转速,确保电机转速在误差范围内和挡位速度一致。如图14所示,通过光电编码器检测当前电机转速,与给定的当前挡位速度计算电机转速误差,与误差系数对比,mcu确定是否要修正转速。若当前速度挡位为p,则在非转弯的情况下,将当前速度强制修正到p挡位。
[0114]
当使用者使用紧急手刹后,误差系数小于-0.5,甚至趋近于-1,此时系统不修正电机速度,进入0档速状态。使用者根据当前身体情况选择适当的速度档位,若当前速度挡位为p,则在非转弯的情况下,将当前速度强制修正到p挡位。
[0115]
速度跟随模式:
[0116]
当使用者主动施力,使得小车的两个驱动轮速度同时增加或降低到一定程度且持续一定的时间,且两轮的速度较为接近,此时判定,使用者希望提高或降低速度。
[0117]
例如此时助行车的速度选择的挡位为p,(q-1)、q、(q 1)档的标准设定速度为v1m/s,vm/sv2m/s,且满足v
2-δv=v=v1 δv,当实际速度满足
[0118][0119]
,且持续一定的时间δt,此时将实际速度修正为第q档标准速度,使得实际速度满足
[0120]
(1-m)v≤vs≤(1 m)v
[0121]
m为修正后的误差系数。
[0122]
并将选择的挡位修正为第q档,并进行挡位锁定,此时完成一次速度跟随。
[0123]
只有当使用者选择了速度跟随模式,才会启用速度跟随的控制模式。速度跟随功能开启后,会出现挡位跃迁的情况,而未开启速度跟随时的速度修正效果只能将速度调整到当前设定的挡位。此功能使用后,只需人为推动小车改变小车速度,实现挡位变换。速度跟随模式下的控制模式有一定的速度修正间隔时间,使用者在间隔期间能够主动调整速度。如果速度修正间隔时长过短,会出现使用者还未将速度调整至理想状态时速度修正已经开始运转,导致实际的速度挡位与使用者需求的挡位不一致,降低使用者的使用体验。
[0124]
在平道行驶过程中,小车速度受干扰很小,这种速度跟随有可行性。但在坡道上时,小车的速度收到坡道影响,实际速度的值可能并不等于选择的速度,此时如果在按照速度跟随的判据,会促使系统将外界干扰因素判定成使用者意图主动变速,出现较大的误差。
[0125]
为了避免启用此模块后在坡道上可能遇到此种问题,可将前后两次速度跟随判定的时间差拉长到t,如为2分钟。如此,速度跟随模块即使在启用之后,也只是每t分钟完成一次速度跟随,每次检测时长为δt,在坡道上不会出现不断放大外界干扰因素的情况,同时合理设定的检测时差t也不是很短,当使用者需要变速时,在(0,t]之内速度跟随模块也能跟随使用者变速。
[0126]
辅助转弯模式:
[0127]
基于整个小车使用的是两个转向前轮和两个驱动后轮,所以对于弯道转向控制,只需要控制两个驱动后轮即可。利用单片机控制直流无刷电机控制板,达到两个驱动轮的转速分别控制,实现弯道转向。
[0128]
当使用者希望进行弯道转向时,希望能够检测出弯道转向的趋势,并进行弯道转向。当使用者扶着小车,对某一边施力,使得某一边的驱动轮速度偏离了正常速度,而且与另一边驱动轮的速度有一定差值时,则认为使用者需要进行弯道转向。
[0129]
当光电检测器检测出两边驱动轮存在一定的差速的时候,默认进入弯道转向过程。假定当前速度为p档速,两边驱动轮的转速应当为bm/s,需要考虑到两种不同的弯道转向过程。
[0130]
1)平道转弯
[0131]
平道转弯过程中,干扰因素较少,此时一边驱动轮速度应当为bm/s,而另一边驱动轮的速度应当大于b(1 k)m/s(k须大于0,设置k目的是为了避免误差影响,当一边驱动轮的速度大于一定的值,才会认为是有转弯倾向),此时电机控制板将驱使一边驱动轮转速为bm/s,另一边为b(1
±
c)m/s,并在δt内维持此种状态。(δt为某一时间值,且很短,满足实际的位移角度θ接近10
°
)
[0132]
参照图10,可以具体分析在δt内步行车的转向过程。设俩驱动轮之间的距离为d,右轮做部分圆周运动的半径为r,两个轮子有相同的角速度w,忽略在转向过程刚开始时的速度加速,默认是驱动轮在进入转向过程时左轮的速度即为b(1 c)m/s。
[0133]
有即d=cr
[0134][0135]
[0136]
即2θd=bcδt
[0137]
由于θ和b是定值,因此可根据上述关系调整c和δt的值,步行车的速度方向的变化角度为α=2θ。这里给出参考示例,当每次转向角d=0.4m,b=0.5m/s,k=0.3,据此如果c=1,则δt=0.2791s。即完成一次10
°
位移角度转向耗时约0.28s,也可计算出左轮的位移距离。d=2(d r)sinθ≈0.2778,d
x
=d sinθ≈0.048m,dy=dcosθ≈0.274m,即左右位移距离约为5cm,前进距离约为27cm。
[0138]
经过一次δt后,小车的位移角度为θ,然后恢复为直行状态,如果认为转弯角度不够,可持续对某一边施力,使得车体重复上述的自动转弯方式,促使总位移角度变大,直到使用者认为合适,即可在完成最后一次转向后变回直行状态。
[0139]
对于连续转向,可参考图11,具体分析在多个δt内步行车的转向过程。
[0140]
由于在δt内的转向运动完成后,使用者可能在延迟很短的时间ti后进行下一次的转向过程,期间步行车会做近似直行驱动,但小车的速度在此期间发生了变化,左轮的速度由b(1 c)m/s下降为b m/s,过程时间tq极短,此后两轮的速度均为b m/s,一直到下一次的转向过程开始。此时可建立数学模型,计算多次转向后,小车的转向耗时tn、实际的位移角度θn(n为转向次数)和速度方向的变化角度ρn。
[0141]
设qn={tn,θn,ρn},在n次转向过程中,共有n-1次的直行驱动,每次的直行时间为ti。做右转弯时左轮的位移为d,在ti内的直行驱离为si。
[0142]
ρn=na=2nθ
[0143][0144]
这里如果要考虑到小车直行驱动后进入转向的加速环节,则步行车在δt内左轮先经过tq的时间速度由b m/s变为b(1 c)m/s,这段位移近似直线运动。将步行车在δt内的转向运动仍等效成理想的转向过程(如图4),但因此得到的结果比实际值偏大,因此将在δt内多出的误差修正入si内,使得
[0145][0146][0147]
对于θn,需要对n为奇数或偶数两种情况加以分析。
[0148]
参照图11的左示意图,对两次转向进行分析,期间包含了短暂的直行运动。主要对左轮运动进行分析。
[0149]
有θs=a=2θ
[0150][0151]
ρs=4θ
[0152]
当n为偶数时,d相当于n/2次ds和s
2i
的叠加,
[0153][0154][0155][0156]
当n为奇数时,d相当于d1与(n-1)/2次ds和的叠加,
[0157][0158][0159][0160]
由上述,qn={tn,θn,ρn}已全部得到。
[0161]
当n=2,视使用者在两次转向中没有间隔的直线运动,作持续的转向运动且θ=10
°
=π/18,d=0.4m,b=0.5m/s,c=1,有q2={0.558s,20
°
,40
°
}。n=3时,q3={0.837s,29.71
°
,60
°
}。
[0162]
当n=2,且计入转向过程的直线运动,设t1=0.05s,其他条件不变,q2={0.563s,20
°
,40
°
}。
[0163]
当n=3,且计入转向过程的直线运动,设t1=0.05s,t2=0.1s,其他条件不变,q3={0.988s,30.285
°
,60
°
}。
[0164]
根据以上的理论与数据分析,弯道转向的理论效果是比较好的。
[0165]
2)坡道转弯
[0166]
坡道转弯中,需要考虑到坡道上实际速度的值并不等于选择速度,在下坡过程中,可能会出现实际速度比选择速度明显大的情况,此时系统要调节速度,对小车进行减速,如果在速度并未完全降下来时,系统不会主动检测弯道转向的趋势,而是需要使用者主动转向,但是这种情况基本不会出现,速度反馈调节是一个较为快速的过程,使用者不会有机会在这种状态下进行转弯。
[0167]
对于所有的驱动逻辑判定,可作如下的总结:
[0168]
设定使用者当前处于p档速,设定的左右两轮的标准速度为v,助行车的实际左轮速度为实际右轮速度为允许的速度修正误差系数是m(m接近0),判定助行车进入自动转弯环节的转弯倾向判定系数是k,q档速的设定的左右两轮的标准速度为vq,每相邻的两个速度挡位的速度差值为固定值δv。
[0169]
1)首先判定是否速度跟随,如果未开启速度跟随,则跳过此环节,进入非速度跟随模式下的速度修正。
[0170]
如果满足
[0171][0172]
此时将挡位修正到q挡位上来,速度修正为
[0173][0174]
如果满足
[0175][0176]
或满足
[0177][0178]
此时助行车优先将挡位调节到q挡位,并将两驱动轮的速度调整为vq,再根据后续的使用者操作做出判断。
[0179]
如果满足
[0180][0181]
或满足
[0182][0183]
此时由于两边速度一边接近vq,一边接近v
q 1
,此时判定存在外界干扰因素影响,跳过速度跟随环节,优先将两边速度修正为v。
[0184]
如果满足
[0185][0186]
或满足
[0187][0188]
此时由于两边车轮速度一边接近vq,一边接近v
q-1
,此时判定存在外界干扰因素影响,跳过速度跟随环节,优先将两边速度修正为v。
[0189]
2)在速度跟随或跳过速度跟随后若有(默认当前挡位的标准速度为v)
[0190][0191]
此时小车进入基本的速度挡位修正环节,将速度修正为
[0192][0193]
3)在速度修正后,如果速度满足(默认当前挡位的标准速度为v)
[0194][0195]
或满足
[0196][0197]
此时助行车进入自动右转弯环节,将速度修正为
[0198][0199]
持续转向的时间为δt,此后重新进入直行环节,满足
[0200][0201]
或是在第一步速度修正后,如果速度满足
[0202][0203]
或满足
[0204][0205]
此时助行车进入自动左转弯环节,将速度修正为
[0206][0207]
持续转向的时间为δt,此后重新进入直行环节,满足
[0208][0209]
电量检测模块:
[0210]
电量检测模块用于测量助行车电源的剩余电量,电量数值将电量测量模块收集传输给单片机,由此显示在液晶电阻屏上。
[0211]
电量的测量电量测量模块来测量,锂电池的电量剩余状态不同时,其相应的输出电压也不同,由24v锂电池的电压及其容量特性,可以通过采样电阻测量电压,并计算出当前锂电池的电量剩余。在实行过程中,可以利用算法模型来减小实际的误差。
[0212]
环境检测模块:
[0213]
如图13所示,环境检测模块主要检测外界环境的温度与湿度。在助行车的外部安装温湿度传感器,检测外界环境,并通过语音系统提示使用者。
[0214]
温湿度的检测能有效规避中暑的风险。中暑的诱因包括温度和相对湿度,如果温度和相对湿度超过了一个界限值,就有中暑的风险。使用者的康复训练可能在夏季炎热时节,存在中暑的风险。如果使用者在康复训练过程中由于炎热天气中暑,会导致严重后果。在助行车外部装有dht11温湿度传感器,ntc热敏电阻在一定的测量功率下,电阻值随着温度上升而迅速下降。通过测量ntc热敏电阻的阻值即可确定环境的温度。同时在传感器上还有一个电阻式感湿元件,在其基片上覆盖一层用感湿材料制成的膜,当空气中的水蒸气吸附在感湿膜上时,元件的电阻率和电阻值都发生变化,利用这一特性即可测量湿度。
[0215]
测量温度和相对湿度,由于使用者身体较弱,当其值超过温度26℃、相对湿度85%和温度38℃相对湿度30%所形成的阈值时,语音系统会有相应提示。
[0216]
心率检测模块
[0217]
如图13所示,在外出康复训练过程中,实时测量心率可在一定程度上规避使用者突发的心脏类疾病。在步行车的扶手处装有光学心率传感器,该传感器可发射红外光,接触到使用者手部后会出现折射,传感器再接收从血管返回的的红外光并对其进行分析,将数据传输至单片机并由单片机得出心率的有关数据并显示在液晶电阻屏上。
[0218]
需要注意的是,光学心率传感器的工作精度受到使用者本身的影响,如果遇到使用者在康复训练时出汗,或使用者的肤色较黑等情况,会影响到传感器接收的红外光,加上肌肉等身体组织对红外光传播的影响,会造成较大误差,因此测量出的心率值并不是完全准确,仅作参考数值。
[0219]
通讯模块
[0220]
①
gps与紧急通讯
[0221]
通讯系统通过cat1无线通讯模块实现。将该模块与stm32单片机相连接,实现该模块与stm32单片机的双向通讯,并与网络服务器相连进行双向透传,最终完成stm32单片机和上位机之间的通讯,参照图15。
[0222]
通过北斗gps双模定位模块将位置信息传输给stm32单片机,再由stm32单片机经cat1模块通过mqtt协议接入到阿里云或其他云平台,传输相应的json格式数据使得北斗gps双模定位模块捕捉到的位置信息可以在服务器上显示,同时创建二维可视化视图,进行高德或者其他地图的调用,实现上位机的位置显示。并且在相关云平台上建立规则引擎同时编写相关微信小程序,使位置可以在微信小程序上显示。
[0223]
紧急联系模块通过cat1所具有的通讯功能进行实现,通过网络服务器与上位机进行语音通话。
[0224]
辅助功能
[0225]
①
液晶电阻屏显示
[0226]
触摸屏使用3.2寸电阻屏,当外力使得电阻屏上下两层在某一点接触时,通过电压的变化判定触摸与否,通过单片机的ad转换功能将测得电压转换为数字信号,从而实现触屏功能。
[0227]
触屏功能与电量显示、心率测量等功能相联系,使用者可通过触摸显示屏上的图
标进行操作或查看相关数据。触摸屏上可控制的功能可参照图16。
[0228]
②
收音机
[0229]
步行车安装有收音机,可通过机械旋钮对收音机的频道进行切换。
[0230]
③
语音播报模块
[0231]
语音播放模块可提醒使用者如何操作、小车是否快碰到障碍物等,对部分使用者(如视力不好的群体)有很重要的辅助意义。语音播报系统采用dy-sv5w,可用stm32单片机控制,单片机检测到其他模块传输的数据并进行处理,传输信号给语音模块,语音模块播放相应语音提醒使用者。鉴于使用者可能是老人,选用的语音模块应具备足够大的音量,此模块可外接扩音器,保证使用者能够听到语音提示。
[0232]
本实施例采用两个独立控制的驱动轮,拥有两种速度控制模式:非自动跟随模式和速度跟随模式。
[0233]
非自动跟随模式下,光电编码器不断检测车体当前速度,mcu根据当前使用者选择的速度挡位,将车体的实际速度修正至使用者选择的速度挡位上来。
[0234]
速度跟随模式取消非自动跟随模式下的挡位速度修正,光电编码器在一定时间内检测当前的车体实际速度,由此mcu根据车体的实际速度将速度挡位修正至与实际速度最相近的挡位上来,进而实现速度跟随,提高助行车与使用者的配合度,进一步降低身体素质较差的使用者的体力消耗,减少使用者发生意外。
[0235]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。