一种采用rbf神经网络补偿的永磁电机智能控制方法
技术领域
1.本发明涉及永磁电机的转速跟踪控制领域,具体而言,涉及一种采用rbf神经网络补偿的永磁电机智能控制方法。
背景技术:
2.永磁同步电动机和直流电机相比,它没有直流电机的换向器和电刷等缺点。和异步电动机相比,它由于不需要无功励磁电流,因而效率高,功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好;和普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。具有好的控制系统的永磁电机能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁电机的转速控制引起了国内外学者的广泛关注。传统的控制方法一般是单轴式的,即一轴稳定另一轴控制转速;而且一般是采用反馈补偿的方式,需要对电机结构参数进行补偿,对负载进行限制补偿,同时抗干扰能力与抗负载变化能力有限。基于上述原因,本发明提出一种采用两个神经网络对双轴控制进行同时补偿的方法,能够大大提高同步电机控制的鲁棒性,增强同步电机控制的抗负载变化能力,从而具有很高的工程实用价值。
3.需要说明的是,在上述背景技术部分发明的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
4.本发明的目的在于提供一种采用rbf神经网络补偿的永磁电机智能控制方法,进而克服由于相关技术的限制和缺陷而导致的电机控制稳定性与可靠性不佳的问题。
5.根据本发明的一个方面,提供一种采用rbf神经网络补偿的永磁电机智能控制方法,包括以下步骤:
6.步骤s10,测量永磁同步电机的转子的位置、转速与三相电流中两相电流,并对两相电流进行坐标变换。
7.步骤s20,采用速度检测传感单元测量永磁同步电机转子转速信号,根据电机任务,设定期望转速信号,然后采用转子转速信号与期望转速信号比较得到转速误差信号;并设计微分积分混合器得到转速误差微分积分混合信号,再设计比例微分混合器,得到转速误差比例微分混合信号;再根据期望转速信号设计rbf转速误差神经网络的50个网络中心点,并求取相应的中心点误差信号;再根据转速误差信号设计rbf转速误差神经网络的50个节点权值系数自适应迭代更新规律,最终通过节点权值系数与相应的中心点误差信号相乘后叠加汇总形成rbf转速误差神经网络的总输出信号。
8.步骤s30,采用所述的转速误差信号叠加转速误差微分积分混合信号、转速误差比例微分混合信号形成d轴电流期望信号,并与经过prak变换后得到两相旋转坐标系d轴定子电流信号进行比较,得到d轴电流误差信号;采用d轴电流误差信号通过微分积分混合器得到d轴电流误差微分积分混合信号,采用d轴电流误差信号通过比例微分混合器,得到d轴电
流误差比例微分混合信号;对d轴电流误差信号进行柔化变换得到d轴电流误差柔化信号,然后采用d轴电流误差信号叠加d轴电流误差微分积分混合信号、d轴电流误差比例微分混合信号、以及d轴电流误差柔化信号与rbf转速误差神经网络的总输出信号形成q轴定子电压控制信号。
9.步骤s40,采用所述的转速误差信号设计转速误差自适应信号、d轴电流误差自适应信号、转速误差比例微分混合自适应信号,并设计相应的自适应系数调节规律;再叠加转速误差信号、d轴电流误差信号、转速误差比例微分混合信号、d轴电流误差比例微分混合信号形成q轴电流期望信号,并与经过prak变换后得到两相旋转坐标系q轴定子电路信号进行比较,得到q轴电流误差信号;采用q轴电流误差信号通过微分积分混合器得到q轴电流误差微分积分混合信号,采用q轴电流误差信号通过比例微分混合器,得到q轴电流误差比例微分混合信号;对q轴电流误差信号与q轴定子电压控制信号进行混合积分变换得到q轴电流误差混合积分信号;对q轴电流误差信号与转速误差信号进行非线性变换得到q轴电流转速误差非线性信号;对q轴定子电压控制信号与转速误差信号进行非线性变换得到q轴电压转速误差非线性信号;然后采用q轴电流误差信号、叠加q轴电流误差比例微分混合信号、q轴电流误差微分积分混合信号、q轴电流误差混合积分信号、q轴电流转速误差非线性信号、q轴电压转速误差非线性信号形成电流误差非线性滑模信号。
10.步骤s50,根据所述的电流误差非线性滑模信号与q轴电流误差进行混合非线性变换得到电流误差滑模非线性变换信号;再根据所述的电流误差非线性滑模信号与q轴定子电压控制信号进行混合非线性变换得到电压误差滑模非线性变换信号;再根据期望转速信号设计50个rbf电流误差神经网络的转速中心点,再求解相应的相对中心点转速误差信号,并根据电流误差非线性滑模信号设计rbf电流误差神经网络权值的自适应调节规律,得到rbf电流误差神经网络权值信号,并与相应的相对中心点转速误差信号相乘与叠加后形成rbf电流误差神经网络的总输出信号;根据电流误差非线性滑模信号、电流误差滑模非线性变换信号、电压误差滑模非线性变换信号与rbf电流误差神经网络的总输出信号进行叠加形成最终的d轴定子电压控制信号;再根据所述的q轴定子电压控制信号、d轴定子电压控制信号、进行park逆变换,得到静止坐标系下两相控制电压,输出给同步电机,实现同步电机的转速控制。
11.在本发明的一种示例实施例中,测量永磁同步电机的转子的位置、转速与三相电流中两相电流,并对两相电流进行坐标变换包括:
[0012][0013][0014]
θe=pnθm;
[0015]
其中ia、ib为通过霍尔电流传感器检测得到的永磁同步电机三相电流信号。i
α
、i
β
为对三相电流中的ia、ib进行clarke变换后得到两相静止坐标系中的定子电流,iq与id为i
α
、iβ
进行prak变换后得到两相旋转坐标系d、q轴的定子电流;θe由转子位置的测量值θm进行变换得到;其中pn为电机极对数。θm为通过位置检测传感单元,测量永磁同步电机转子的位置信号。
[0016]
在本发明的一种示例实施例中,采用速度检测传感单元测量永磁同步电机转子转速信号,根据电机任务,设定期望转速信号,然后采用转子转速信号与期望转速信号比较得到转速误差信号;并设计微分积分混合器得到转速误差微分积分混合信号,再设计比例微分混合器,得到转速误差比例微分混合信号包括:
[0017]eω
=ω
m-ω
md
;
[0018][0019][0020]
其中ωm为速度检测传感单元测量永磁同步电机转子的转速信号;ω
md
为根据电机任务设定的期望转速信号;e
ω
为转速误差信号,h1为转速误差微分积分混合信号,h2为转速误差比例微分混合信号,t1、t2、t3、t4、t5、t6为传递函数的常值参数,s为微分积分混合器以及比例微分混合器的传递函数的微分算子。
[0021]
在本发明的一种示例实施例中,根据期望转速信号设计rbf转速误差神经网络的50个网络中心点,并求取相应的中心点误差信号;再根据转速误差信号设计rbf转速误差神经网络的50个节点权值系数自适应迭代更新规律,最终通过节点权值系数与相应的中心点误差信号相乘后叠加汇总形成rbf转速误差神经网络的总输出信号包括:
[0022][0023][0024][0025][0026]
其中ωi为rbf转速误差神经网络的网络中心点,z
1i
为rbf转速误差神经网络的中心点误差信号,为rbf转速误差神经网络的节点权值系数,k
1i
、k
2i
为常值参数,用于调节rbf转速误差神经网络的节点权值系数收敛快慢,ga为rbf转速误差神经网络的总输出信号,σ为网络常值参数,ε1为常值参数。
[0027]
在本发明的一种示例实施例中,采用所述的转速误差信号叠加转速误差微分积分混合信号、转速误差比例微分混合信号形成d轴电流期望信号,并与经过prak变换后得到两相旋转坐标系d轴定子电流信号进行比较,得到d轴电流误差信号;采用d轴电流误差信号通过微分积分混合器得到d轴电流误差微分积分混合信号包括:
[0028]idx
=k1e
ω
k2h1 k3h2;
[0029]
ed=i
d-i
dx
;
[0030][0031]
其中i
dx
为d轴电流期望信号、ed为d轴电流误差信号、h3为d轴电流误差比例微分混合信号、s为传递函数的微分算子;k1、k2、k3为常值参数。
[0032]
在本发明的一种示例实施例中,采用d轴电流误差信号通过比例微分混合器,得到d轴电流误差比例微分混合信号,对d轴电流误差信号进行柔化变换得到d轴电流误差柔化信号,然后采用d轴电流误差信号叠加d轴电流误差微分积分混合信号、d轴电流误差比例微分混合信号、以及d轴电流误差柔化信号与rbf转速误差神经网络的总输出信号形成q轴定子电压控制信号包括:
[0033][0034][0035]
uq=k4ed k5h3 k6h4 k
w1
h5 k
w2
ga;
[0036]
其中h4为d轴电流误差微分积分混合信号、s为传递函数的微分算子;h5为d轴电流误差柔化信号,uq为q轴定子电压控制信号;k4、k5、k6、k
w1
、k
w2
、ε3为常值参数。
[0037]
在本发明的一种示例实施例中,采用所述的转速误差信号设计转速误差自适应信号、d轴电流误差自适应信号、转速误差比例微分混合自适应信号,并设计相应的自适应系数调节规律;再叠加转速误差信号、d轴电流误差信号、转速误差比例微分混合信号、d轴电流误差比例微分混合信号形成q轴电流期望信号,并与经过prak变换后得到两相旋转坐标系q轴定子电路信号进行比较,得到q轴电流误差信号包括:
[0038]iqx
=k7e
ω
k8ed k9h2 k
10
h3 g1 g2 g3;
[0039][0040][0041][0042][0043][0044][0045]eq
=i
q-i
qx
;
[0046]
其中i
qx
为q轴电流期望信号、g1为转速误差自适应信号、g2为d轴电流误差自适应
信号、g3为转速误差比例微分混合自适应信号;为转速误差自适应系数、为d轴电流误差自适应信号系数、为转速误差比例微分混合自适应系数;k
a1
、k
a2
、k
a3
为常值参数,用于调节上述自适应参数的收敛速度快慢;eq为q轴电流误差信号,k7、k8、k9、k
10
为常值参数。
[0047]
在本发明的一种示例实施例中,采用q轴电流误差信号通过微分积分混合器得到q轴电流误差微分积分混合信号,采用q轴电流误差信号通过比例微分混合器,得到q轴电流误差比例微分混合信号;对q轴电流误差信号与q轴定子电压控制信号进行混合积分变换得到q轴电流误差混合积分信号;对q轴电流误差信号与转速误差信号进行非线性变换得到q轴电流转速误差非线性信号;对q轴定子电压控制信号与转速误差信号进行非线性变换得到q轴电压转速误差非线性信号;然后采用q轴电流误差信号、叠加q轴电流误差比例微分混合信号、q轴电流误差微分积分混合信号、q轴电流误差混合积分信号、q轴电流转速误差非线性信号、q轴电压转速误差非线性信号形成电流误差非线性滑模信号包括:
[0048][0049][0050]
h7=∫eq|uq|dt;
[0051][0052][0053]
sa=k
11eq
k
12
h5 k
13
h6 k
14
h7 k
15
h8 k
16
h9;
[0054]
其中h5为q轴电流误差比例微分混合信号、h6为q轴电流误差微分积分混合信号、h7为q轴电流误差混合积分信号、h8为q轴电流转速误差非线性信号、h9为q轴电压转速误差非线性信号、sa为电流误差非线性滑模信号;k
11
、k
12
、k
13
、k
14
、k
15
、k
16
为常值参数。
[0055]
在本发明的一种示例实施例中,根据所述的电流误差非线性滑模信号与q轴电流误差进行混合非线性变换得到电流误差滑模非线性变换信号;再根据所述的电流误差非线性滑模信号与q轴定子电压控制信号进行混合非线性变换得到电压误差滑模非线性变换信号;再根据期望转速信号设计50个rbf电流误差神经网络的转速中心点,再求解相应的相对中心点转速误差信号包括:
[0056][0057][0058]
[0059][0060]
其中h
10
为电流误差滑模非线性变换信号;h
11
电压误差滑模非线性变换信号;ω
2i
为rbf电流误差神经网络的转速中心点,z
2i
为相对中心点转速误差信号。
[0061]
在本发明的一种示例实施例中,根据电流误差非线性滑模信号设计rbf电流误差神经网络权值的自适应调节规律,得到rbf电流误差神经网络权值信号,并与相应的相对中心点转速误差信号相乘与叠加后形成rbf电流误差神经网络的总输出信号;根据电流误差非线性滑模信号、电流误差滑模非线性变换信号、电压误差滑模非线性变换信号与rbf电流误差神经网络的总输出信号进行叠加形成最终的d轴定子电压控制信号;再根据所述的q轴定子电压控制信号、d轴定子电压控制信号、进行park逆变换,得到静止坐标系下两相控制电压包括:
[0062][0063][0064]
ud=k
17
sa k
18h10
k
19h11
gb;
[0065][0066]
其中为rbf电流误差神经网络权值信号,k
3i
、k
4i
为常值参数,用于调节rbf转速误差神经网络的节点权值系数收敛快慢,gb为rbf电流误差神经网络的总输出信号;ud为最终的d轴定子电压控制信号;k
17
、k
18
、k
19
为常值控制参数;u
α
与u
β
为静止坐标系下的两相控制电压,输出给同步电机,实现同步电机的转速控制。
[0067]
有益效果
[0068]
本发明一种采用rbf神经网络补偿的永磁电机智能控制方法,其主要创新点有如下两点:其一在于设计了转速误差rbf神经网络与rbf电流误差神经网络,用于补偿两轴电流与电压控制中的系统不确定性,从而使得系统的抗干扰能力与负载能力大大增强。其二在于设计了微分积分与比例微分混合器以及电流误差非线性滑模的设计手段,从而使得整个方法具有很好的稳定性,也使得整个设计具有很高的可靠性与安全性。
[0069]
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
[0070]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0071]
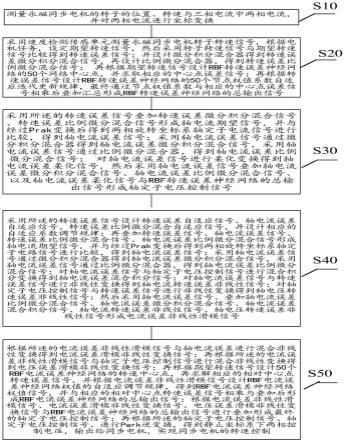
图1是本发明提供的一种采用rbf神经网络补偿的永磁电机智能控制方法流程图。
[0072]
图2是本发明实施例所提供方法的电机旋转速度曲线(单位:弧度/秒);
[0073]
图3是本发明实施例所提供方法的旋转速度误差曲线(单位:弧度每秒);
[0074]
图4是本发明实施例所提供方法的d轴电流期望信号曲线(单位:安);
[0075]
图5是本发明实施例所提供方法的d轴电流误差信号曲线(单位:安);
[0076]
图6是本发明实施例所提供方法的q轴电流期望信号曲线(单位:安);
[0077]
图7是本发明实施例所提供方法的q轴电流误差信号曲线(单位:安);
[0078]
图8是本发明实施例所提供方法的d轴定子电压控制信号曲线(单位:无);
[0079]
图9是本发明实施例所提供方法的q轴定子电压控制信号曲线(单位:无);
[0080]
图10是本发明实施例所提供方法的rbf转速误差神经网络的总输出(单位:无);
[0081]
图11是本发明实施例所提供方法的rbf电流误差神经网络的总输出信号(单位:无)。
具体实施方式
[0082]
现在将参考附图基础上更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。在下面的描述中,提供许多具体细节从而给出对本发明的实施方式的充分理解。然而,本领域技术人员将意识到,可以实践本发明的技术方案而省略所述特定细节中的一个或更多,或者可以采用其它的方法、组元、装置、步骤等。在其它情况下,不详细示出或描述公知技术方案以避免喧宾夺主而使得本发明的各方面变得模糊。
[0083]
本发明提供了一种通过转速误差信号设计微分积分与比例微分混合器得到转速误差的比例微分混合信号组成d轴电流期望信号并与d轴定子电流信号进行比较,得到d轴电流误差信号,再设计具有50个节点的转速误差rbf神经网络,采用转速误差调节神经网络权值形成神经网络输出,组合形成q轴定子电压控制信号。同时采用转速误差信号设计转速误差自适应信号、d轴电流误差自适应信号、转速误差比例微分混合自适应信号并相应的自适应系数调节规律,形成q轴电流期望信号,并与q轴定子电路信号进行比较,得到q轴电流误差信号,并通过微分积分与比例微分混合器以及混合积分与非线性变换得到电流误差非线性滑模信号,再设计rbf电流误差神经网络对系统不确定性进行补偿,最终形成d轴定子电压控制信号,实现电机转速控制。
[0084]
下面,将结合附图对本发明的一种采用rbf神经网络补偿的永磁电机智能控制方法,进行进一步的解释以及说明。参考图1所示,该一种采用rbf神经网络补偿的永磁电机智能控制方法,可以包括以下步骤:
[0085]
步骤s10,测量永磁同步电机的转子的位置、转速与三相电流中两相电流,并对两相电流进行clarke坐标变换与prak变换,得到电机两相旋转坐标系d、q轴的定子电流。
[0086]
具体的,首先,通过位置/速度检测传感单元分别测量永磁同步电机转子的位置与转速信号,其中转子位置记为θm,转速记为ωm;其次,通过霍尔电流传感器检测永磁同步电机三相电流信号,分别记作ia、ib、ic。
[0087]
然后,对三相电流中的ia、ib进行clarke变换,得到两相静止坐标系中的定子电流i
α
、i
β
。其中clarke变换定义如下:
[0088][0089]
再次,进行如下的prak变换,得到两相旋转坐标系d、q轴的定子电流id与iq。其中park变换的定义如下:
[0090][0091]
其中θe=pnθm,pn为电机极对数,即θe由转子位置的测量值θm进行变换得到,θm为通过位置检测传感单元测量得到的永磁同步电机转子的位置信号。
[0092]
步骤s20,采用速度检测传感单元测量永磁同步电机转子转速信号,根据电机任务,设定期望转速信号,然后采用转子转速信号与期望转速信号比较得到转速误差信号;并设计微分积分混合器得到转速误差微分积分混合信号,再设计比例微分混合器,得到转速误差比例微分混合信号;再根据期望转速信号设计rbf转速误差神经网络的50个网络中心点,并求取相应的中心点误差信号;再根据转速误差信号设计rbf转速误差神经网络的50个节点权值系数自适应迭代更新规律,最终通过节点权值系数与相应的中心点误差信号相乘后叠加汇总形成rbf转速误差神经网络的总输出信号。
[0093]
具体的,可以分为如下七小步。第一步,采用速度检测传感单元测量永磁同步电机转子转速信号,根据电机任务,设定期望转速信号,然后采用转子转速信号与期望转速信号比较得到转速误差信号如下:
[0094]eω
=ω
m-ω
md
;
[0095]
其中ωm为速度检测传感单元测量永磁同步电机转子的转速信号;ω
md
为根据电机任务设定的期望转速信号;e
ω
为转速误差信号。
[0096]
第二步,设计微分积分混合器,将转速误差信号通过微分积分混合器得到转速误差微分积分混合信号如下:
[0097][0098]
其中h1为转速误差微分积分混合信号,s为微分积分混合器的传递函数的微分算子,t1、t2为传递函数的常值参数,详细选取见后文案例实施。
[0099]
第三步,设计比例微分混合器,将转速误差信号通过通过比例微分混合器得到转速误差比例微分混合信号如下:
[0100][0101]
其中h2为转速误差比例微分混合信号,t3、t4、t5、t6为传递函数的常值参数。
[0102]
第四步,根据期望转速信号设计rbf转速误差神经网络的50个网络中心点如下:
[0103][0104]
其中ωi为rbf转速误差神经网络的网络中心点。
[0105]
第五步,根据rbf转速误差神经网络的网络中心点,求取相应的中心点误差信号如下:
[0106][0107]
其中z
1i
为rbf转速误差神经网络的中心点误差信号,σ为网络常值参数,ε1为常值参数。
[0108]
第六步,根据转速误差信号设计rbf转速误差神经网络的50个节点权值系数自适应迭代更新规律如下:
[0109][0110]
其中为rbf转速误差神经网络的节点权值系数,k
1i
、k
2i
为常值参数,用于调节rbf转速误差神经网络的节点权值系数收敛快慢。
[0111]
第七步,采用节点权值系数与相应的中心点误差信号相乘后叠加汇总形成rbf转速误差神经网络的总输出信号如下:
[0112][0113]
其中ga为rbf转速误差神经网络的总输出信号。
[0114]
步骤s30,采用所述的转速误差信号叠加转速误差微分积分混合信号、转速误差比例微分混合信号形成d轴电流期望信号,并与经过prak变换后得到两相旋转坐标系d轴定子电流信号进行比较,得到d轴电流误差信号;采用d轴电流误差信号通过微分积分混合器得到d轴电流误差微分积分混合信号,采用d轴电流误差信号通过比例微分混合器,得到d轴电流误差比例微分混合信号;对d轴电流误差信号进行柔化变换得到d轴电流误差柔化信号,然后采用d轴电流误差信号叠加d轴电流误差微分积分混合信号、d轴电流误差比例微分混合信号、以及d轴电流误差柔化信号与rbf转速误差神经网络的总输出信号形成q轴定子电压控制信号。
[0115]
具体的,可以分解为如下六小步。第一步,采用转速误差信号叠加转速误差微分积分混合信号、转速误差比例微分混合信号形成d轴电流期望信号如下:
[0116]idx
=k1e
ω
k2h1 k3h2;
[0117]
其中i
dx
为d轴电流期望信号,k1、k2、k3为常值参数。
[0118]
第二步,将d轴电流期望信号与经过prak变换后得到两相旋转坐标系d轴定子电流信号进行比较,得到d轴电流误差信号如下:
[0119]
ed=i
d-i
dx
;
[0120]
其中ed为d轴电流误差信号。
[0121]
第三步,采用d轴电流误差信号通过微分积分混合器得到d轴电流误差微分积分混合信号如下:
[0122][0123]
其中h3为d轴电流误差比例微分混合信号。
[0124]
第四步,采用d轴电流误差信号通过比例微分混合器,得到d轴电流误差比例微分混合信号如下:
[0125][0126]
其中h4为d轴电流误差微分积分混合信号。
[0127]
第五步,对d轴电流误差信号进行柔化变换得到d轴电流误差柔化信号如下:
[0128][0129]
其中h5为d轴电流误差柔化信号,ε3为常值参数,其详细设计见后文案例实施。
[0130]
第六步,采用d轴电流误差信号叠加d轴电流误差微分积分混合信号、d轴电流误差比例微分混合信号、以及d轴电流误差柔化信号与rbf转速误差神经网络的总输出信号形成q轴定子电压控制信号如下:
[0131]
uq=k4ed k5h3 k6h4 k
w1
h5 k
w2
ga;
[0132]
其中uq为q轴定子电压控制信号,k4、k5、k6、k
w1
、k
w2
为常值参数。
[0133]
步骤s40,采用所述的转速误差信号设计转速误差自适应信号、d轴电流误差自适应信号、转速误差比例微分混合自适应信号,并设计相应的自适应系数调节规律;再叠加转速误差信号、d轴电流误差信号、转速误差比例微分混合信号、d轴电流误差比例微分混合信号形成q轴电流期望信号,并与经过prak变换后得到两相旋转坐标系q轴定子电路信号进行比较,得到q轴电流误差信号;采用q轴电流误差信号通过微分积分混合器得到q轴电流误差微分积分混合信号,采用q轴电流误差信号通过比例微分混合器,得到q轴电流误差比例微分混合信号;对q轴电流误差信号与q轴定子电压控制信号进行混合积分变换得到q轴电流误差混合积分信号;对q轴电流误差信号与转速误差信号进行非线性变换得到q轴电流转速误差非线性信号;对q轴定子电压控制信号与转速误差信号进行非线性变换得到q轴电压转速误差非线性信号;然后采用q轴电流误差信号、叠加q轴电流误差比例微分混合信号、q轴电流误差微分积分混合信号、q轴电流误差混合积分信号、q轴电流转速误差非线性信号、q轴电压转速误差非线性信号形成电流误差非线性滑模信号。
[0134]
具体的,可以分解为如下十小步。
[0135]
第一步,采用转速误差信号设计转速误差自适应信号、d轴电流误差自适应信号、转速误差比例微分混合自适应信号如下:
[0136][0137][0138][0139]
其中g1为转速误差自适应信号、g2为d轴电流误差自适应信号、g3为转速误差比例
微分混合自适应信号;为转速误差自适应系数、为d轴电流误差自适应信号系数、为转速误差比例微分混合自适应系数。
[0140]
第二步,采用转速误差信号设计相应的自适应系数调节规律如下:
[0141][0142][0143][0144]
其中k
a1
、k
a2
、k
a3
为常值参数,用于调节上述自适应参数的收敛速度快慢,七详细设计见后文案例实施。
[0145]
第三步,采用转速误差自适应信号、d轴电流误差自适应信号、转速误差比例微分混合自适应信号叠加转速误差信号、d轴电流误差信号、转速误差比例微分混合信号、d轴电流误差比例微分混合信号形成q轴电流期望信号如下:
[0146]iqx
=k7e
ω
k8ed k9h2 k
10
h3 g1 g2 g3;
[0147]
其中i
qx
为q轴电流期望信号,k7、k8、k9、k
10
为常值参数。
[0148]
第四步,将q轴电流期望信号与经过prak变换后得到两相旋转坐标系q轴定子电路信号进行比较,得到q轴电流误差信号
[0149]eq
=i
q-i
qx
;
[0150]
其中eq为q轴电流误差信号。
[0151]
第五步,采用q轴电流误差信号通过微分积分混合器得到q轴电流误差微分积分混合信号如下:
[0152][0153]
其中h5为q轴电流误差比例微分混合信号。
[0154]
第六步,采用q轴电流误差信号通过比例微分混合器,得到q轴电流误差比例微分混合信号如下:
[0155][0156]
其中h6为q轴电流误差微分积分混合信号。
[0157]
第七步,对q轴电流误差信号与q轴定子电压控制信号进行混合积分变换得到q轴电流误差混合积分信号如下:
[0158]
h7=∫eq|uq|dt;
[0159]
其中h7为q轴电流误差混合积分信号。
[0160]
第八步,对q轴电流误差信号与转速误差信号进行非线性变换得到q轴电流转速误差非线性信号如下:
[0161][0162]
其中h8为q轴电流转速误差非线性信号。
[0163]
第九步,对q轴定子电压控制信号与转速误差信号进行非线性变换得到q轴电压转速误差非线性信号如下:
[0164][0165]
其中h9为q轴电压转速误差非线性信号。
[0166]
第十步,然后采用q轴电流误差信号、叠加q轴电流误差比例微分混合信号、q轴电流误差微分积分混合信号、q轴电流误差混合积分信号、q轴电流转速误差非线性信号、q轴电压转速误差非线性信号形成电流误差非线性滑模信号如下:
[0167]
sa=k
11eq
k
12
h5 k
13
h6 k
14
h7 k
15
h8 k
16
h9;
[0168]
其中sa为电流误差非线性滑模信号;k
11
、k
12
、k
13
、k
14
、k
15
、k
16
为常值参数。
[0169]
步骤s50,根据所述的电流误差非线性滑模信号与q轴电流误差进行混合非线性变换得到电流误差滑模非线性变换信号;再根据所述的电流误差非线性滑模信号与q轴定子电压控制信号进行混合非线性变换得到电压误差滑模非线性变换信号;再根据期望转速信号设计50个rbf电流误差神经网络的转速中心点,再求解相应的相对中心点转速误差信号,并根据电流误差非线性滑模信号设计rbf电流误差神经网络权值的自适应调节规律,得到rbf电流误差神经网络权值信号,并与相应的相对中心点转速误差信号相乘与叠加后形成rbf电流误差神经网络的总输出信号;根据电流误差非线性滑模信号、电流误差滑模非线性变换信号、电压误差滑模非线性变换信号与rbf电流误差神经网络的总输出信号进行叠加形成最终的d轴定子电压控制信号;再根据所述的q轴定子电压控制信号、d轴定子电压控制信号、进行park逆变换,得到静止坐标系下两相控制电压,输出给同步电机,实现同步电机的转速控制。
[0170]
具体的,可以分解为如下六小步。
[0171]
第一步,采用电流误差非线性滑模信号与q轴电流误差进行混合非线性变换得到电流误差滑模非线性变换信号如下:
[0172][0173]
其中h
10
为电流误差滑模非线性变换信号。
[0174]
第二步,采用电流误差非线性滑模信号与q轴定子电压控制信号进行混合非线性变换得到电压误差滑模非线性变换信号如下;
[0175][0176]
其中h
11
电压误差滑模非线性变换信号。
[0177]
第三步,根据期望转速信号设计50个rbf电流误差神经网络的转速中心点,再求解
相应的相对中心点转速误差信号如下:
[0178][0179][0180]
其中ω
2i
为rbf电流误差神经网络的转速中心点,z
2i
为相对中心点转速误差信号。
[0181]
第四步,根据电流误差非线性滑模信号设计rbf电流误差神经网络权值的自适应调节规律,得到rbf电流误差神经网络权值信号,并与相应的相对中心点转速误差信号相乘与叠加后形成rbf电流误差神经网络的总输出信号如下:
[0182][0183][0184]
其中为rbf电流误差神经网络权值信号,k
3i
、k
4i
为常值参数,用于调节rbf转速误差神经网络的节点权值系数收敛快慢,gb为rbf电流误差神经网络的总输出信号。
[0185]
第五步,采用电流误差非线性滑模信号、电流误差滑模非线性变换信号、电压误差滑模非线性变换信号与rbf电流误差神经网络的总输出信号进行叠加形成最终的d轴定子电压控制信号如下:
[0186]
ud=k
17
sa k
18h10
k
19h11
gb;
[0187]
其中ud为最终的d轴定子电压控制信号;k
17
、k
18
、k
19
为常值控制参数。
[0188]
第六步,针对所述设计的q轴定子电压uq与d轴定子电压ud进行park逆变换如下
[0189][0190]
其中u
α
、u
β
为两相静止坐标系中的α、β轴定子电压。最后,将u
α
、u
β
输出给空间矢量脉宽调制与三相逆变器,最终输出给永磁同步电机,控制电机转速达到给得的速度ω
mc
。有关空间矢量脉宽调制与三相逆变器为本专业成熟技术,非本发明保护内容,故在此不详细展开说明。
[0191]
案例实施与计算机仿真模拟结果分析
[0192]
在步骤s10中,设置pn=2。
[0193]
在步骤s20中,设定期望转速信号为ω
mc
=24,选取t1=15、t2=0.15、t3=0.05、t4=0.06、t5=0.8、t6=0.4、ε1=0.35、σ=0.35。
[0194]
在步骤s30中,设定k1=0.24、k2=0.13、k3=0.2、k4=0.32、k5=0.21、k6=0.16、k
w1
=0.18、k
w2
=0.95、ε3=0.06。
[0195]
在步骤s40中,设定k7=0.24、k8=0.03、k9=0.15、k
10
=0.2、k
11
=0.35、k
12
=0.21、k
13
=0.13、k
14
=0.08、k
15
=0.02、k
16
=0.09。
[0196]
在步骤s40中,设定k
17
=0.85、k
18
=0.25、k
19
=0.2。
[0197]
最终得到的电机旋转速度曲线如图2所示,旋转速度误差曲线如图3所示,d轴电流期望信号如图4所示,d轴电流误差信号如图5所示,q轴电流期望信号如图6所示,q轴电流误差信号如图7所示,d轴定子电压控制信号如图8所示,q轴定子电压控制信号如图9所示,rbf转速误差神经网络的总输出信号如图10所示,rbf电流误差神经网络的总输出信号如图11所示。由图2可以看出,整个电机旋转速度能够在10秒内对期望速度进行快速跟踪;图3显示速度跟踪误差能快速收敛到0;图4与图5也表明了d轴电流误差能够在2秒内快速收敛到0;图6与图7表明q轴电流误差信号也是和d轴一样同时快速的收敛,图8与图9为控制电压,图10与图10为神经网络信号,可以看出其能够对控制电压进行很好的补偿,从而使得整个方案对模型精确参数信息要求低,而且负载变化适应能力强,从而具有很高的工程应用价值。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
