1.本发明涉及水质采样结构技术领域,尤其涉及一种基于无人机的水样采集方法。
背景技术:
2.传统的人工水样采样方法主要是通过调研船等驶入采样水域内,通过现有的采水器进行人工采样;但传统的人工水样采样方法的效率低,而且由于采样环境多样,往往会给人工采样带来极大的不便;尤其是在一些特殊的环境下,甚至无法进行人工采样。
3.目前,为解决传统人工水样采样方法存在的不足,无人采样设备应运而生。无人机采样是无人采样的一种,目前的无人机水样采集是通过在无人机上设置升降系统,并通过升降系统来升降采水结构实现水样采集。
4.但是,由于水样采集过程中,采样结构空载自重不可忽略,上下过程都存在速度惯性,往往在下降过程中升降装置速度会跟随下坠的采样设备加速,导致采样设备速度太大,在接触水面的时候撞击造成采样设备存在安全风险;同时驱动电机多为人工操控,经常会出现操作不规范导致驱动电机输出短时间内转速幅度变化过大,在拉伸重物过程中,造成无人机振动剧烈,严重影响飞行安全。
5.另外,采水过程中与外界接触较少且无大面积暴露内装置,避免了在转移过程中遭受二次污染,保证了采集的密封性即水质检测的准确性要求。
技术实现要素:
6.有鉴于此,本发明提供一种基于无人机的水样采集方法,以解决人工采集费时费力且无法保证采样水质不被破坏的的技术问题。
7.为了达到上述目的,本发明解决技术问题的技术方案是提供一种基于无人机的水样采集方法,所述无人机上设置有一双针头水样采集装置,所述采集方法包括:
8.步骤s
100
:无人机接收欲采样地点的位置信息,所述无人机根据欲采样地点的位置信息,自主飞抵欲采样地点;
9.步骤s
200
:获取欲采集水样的深度,所述欲采集水样的深度发送于一无人机控制平台,或者为一预设的默认值;
10.步骤s
300
:基于所述无人机离水面的距离以及欲采集水样的深度,计算所述双针头水样采集装置欲降落的距离;
11.步骤s
400
:控制所述双针头水样采集装置降落至预定深度,所述双针头水样采集装置采集水样;
12.步骤s
500
:无人机飞抵一返航点后,所述无人机悬停,待所述双针头水样采集装置从所述无人机取下后降落或飞抵下一个欲采样地点;
13.步骤s
600
:基于计算自身携带的电池的电量、所述双针头水样采集装置采集水样的重量、以及所述无人机的起飞点至欲采样地点之间的距离和采样地点与返航点之间的距离,计算所述无人机的剩余电量能否使所述无人机飞抵欲采样地点并在采集到水样后飞抵
所述返航点,当剩余电量能使所述无人机飞抵欲采样地点并在采集到水样后飞抵所述返航点时,所述无人机起飞,否则禁止起飞。
14.进一步地,所述双针头水样采集装置包括:
15.采集前端,所述采集前端包括采集管、封堵在所述采集管的管口的密封橡胶圈以及双头采集针,所述双头采集针包括通过软管相连的内针头和外针头,所述内针头的初始位置与所述采集管的密封橡胶圈对齐,所述外针头固定在双针头水样采集装置的外表面,且与水面接触,以用于吸入水;
16.当采集水时,所述内针头刺破所述密封橡胶圈进入到所述采集管内,利用压强原理采水;当采水结束时,所述内针头从所述密封橡胶圈拔出,所述外针头因压强原理停止采水,所述采集管自动与外界隔离;
17.采集支架,多个所述采集管均匀安装在所述采集支架上,且所述采集支架的外圆周上设有啮合齿;
18.电机和齿轮装置,所述电机为所述齿轮装置提供动力,所述齿轮装置与所述采集支架的外圈啮合连接;
19.安装板,其一端连接在所述采集支架上,另一端连接在所述无人机上。
20.进一步地,在步骤s
100
当中,所述欲采样地点的地址信息发送于所述无人机控制平台,所述无人机控制平台显示有一卫星地图,可在卫星地图上选取欲采样地点或者在所述无人机控制平台上输入欲采样地点,所述无人机控制平台将该选取欲采样地点的位置信息发送至所述无人机。
21.进一步地,在步骤s
200
中,所述预设的默认值范围为0.3-0.8米。
22.进一步地,在步骤s
300
中,所述基于所述无人机离水面的距离的具体实施过程为:
23.在无人机上设置有一用于测量所述无人机离水面距离的距离传感器,通过所述距离传感器实时测量无人机距离水面的距离。
24.进一步地,在步骤s
400
中,所述控制所述双针头水样采集装置降落至预定深度的具体实施方式包括:
25.所述无人机上设置有一用于使所述双针头水样采集装置相对所述无人机可升降的升降装置,所述无人机控制所述升降装置带动所述双针头水样采集装置降落至预定深度。
26.进一步地,所述无人机还包括一信号接收器,用于接收所述无人机控制平台的控制信号,所述无人机通过所述无人机控制平台操控飞抵欲采样地点。
27.进一步地,所述无人机与所述双针头水样采集装置通过感应装置进行分离与合体,以实现所述无人机的自动化采水工作。
28.进一步地,所述采集管的内针头竖直固定在电动齿轮上,通过所述电动齿轮的转动来控制所述内针头的升降。
29.进一步地,所述采集管的数量为1-6个,每个所述采集管容量不大于450毫升
30.与现有技术相比,本发明所提供的基于无人机的水样采集方法具有以下有益效果:
31.基于无人机的水样采集方法,通过对压强原理抽取(负压抽取原理)研究,选取双针头水样采集装置和无人机的联动,开展对于无人机双针头采水装置研究,提高采集水质
的质量和自动化程度,对于增加采集的密封性即水质检测的准确性、高效化、自动化具有重大意义。
附图说明
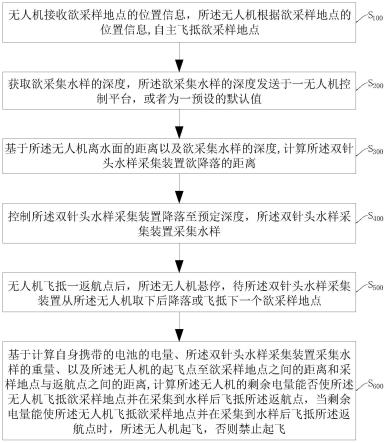
32.图1为本发明实施例提供的基于无人机的水样采集方法的流程示意图。
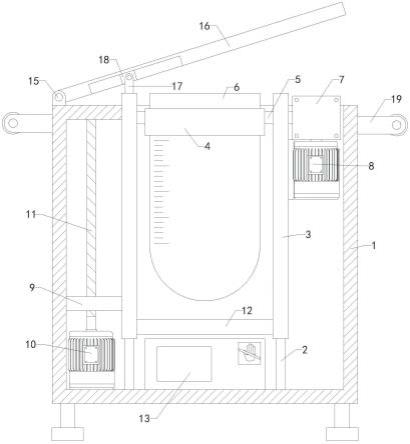
33.图2为本发明实施例提供的基于无人机的双针头水样采集装置的结构示意图。
具体实施方式
34.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
35.在本发明的描述中,需要理解的是,术语“上下”、“左右”、“前后”等指示的方位或位置关系为基于说明书附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
36.请参阅图1-2所示,本发明实施例提供一种基于无人机的水样采集方法,所述采集方法包括:
37.步骤s
100
:无人机接收欲采样地点的位置信息,所述无人机根据欲采样地点的位置信息,自主飞抵欲采样地点;
38.步骤s
200
:获取欲采集水样的深度,所述欲采集水样的深度发送于一无人机控制平台,或者为一预设的默认值;
39.步骤s
300
:基于所述无人机离水面的距离以及欲采集水样的深度,计算所述双针头水样采集装置欲降落的距离;
40.步骤s
400
:控制所述双针头水样采集装置降落至预定深度,所述双针头水样采集装置采集水样;
41.步骤s
500
:无人机飞抵一返航点后,所述无人机悬停,待所述双针头水样采集装置从所述无人机取下后降落或飞抵下一个欲采样地点;
42.步骤s
600
:基于计算自身携带的电池的电量、所述双针头水样采集装置采集水样的重量、以及所述无人机的起飞点至欲采样地点之间的距离和采样地点与返航点之间的距离,计算所述无人机的剩余电量能否使所述无人机飞抵欲采样地点并在采集到水样后飞抵所述返航点,当剩余电量能使所述无人机飞抵欲采样地点并在采集到水样后飞抵所述返航点时,所述无人机起飞,否则禁止起飞。
43.由此,双针头水样采集装置负责采水装置的启动与升降,当接到无人机控制平台的采水命令时,便深入到水下,等待采水结束后自动密封,通过转动借助感应器使下部采水装置提升,再由上部的无人机接受并固定,然后一同飞回到指定区域。
44.需要说明的是,无人机控制平台的飞行控制系统,由于无人机采水前后的重量变化较大,会影响其原有的飞行姿态和轨迹,因此,无人机飞行控制系统在原有的自带功能之上加有载重时自抗扰控制器,以保证在双针头水样采集装置完成采水任务后,继续保持原有的平衡飞行状态。
45.具体地,请参阅图2所示,在本发明的实施例当中,所述双针头水样采集装置包括:
46.采集前端,所述采集前端包括采集管、封堵在所述采集管的管口的密封橡胶圈以及双头采集针,所述双头采集针包括通过软管相连的内针头和外针头,所述内针头的初始位置与所述采集管的密封橡胶圈对齐,所述外针头固定在双针头水样采集装置的外表面,且与水面接触,以用于吸入水;
47.当采集水时,所述内针头刺破所述密封橡胶圈进入到所述采集管内,利用压强原理采水;当采水结束时,所述内针头从所述密封橡胶圈拔出,所述外针头因压强原理停止采水,所述采集管自动与外界隔离;
48.采集支架,多个所述采集管均匀安装在所述采集支架上,且所述采集支架的外圆周上设有啮合齿;
49.电机和齿轮装置,所述电机为所述齿轮装置提供动力,所述齿轮装置与所述采集支架的外圈啮合连接;
50.安装板,其一端连接在所述采集支架上,另一端连接在所述无人机上。
51.由此,双针头水样采集装置的升降控制系统和采集管的启停控制,通过电动齿轮与控制器的配合为主,利用感应器连接升降系统与启停系统为辅。控制器内部核心硬件发出上升与下降指令而控制升降系统,同时齿轮运转带动采集管内的内针头的伸出与缩回,从而控制采集管启停系统,实现无人机采水系统一体化与高效化。
52.具体地,在本发明的实施例当中,步骤s
100
当中,所述欲采样地点的地址信息发送于所述无人机控制平台,所述无人机控制平台显示有一卫星地图,可在卫星地图上选取欲采样地点或者在所述无人机控制平台上输入欲采样地点,所述无人机控制平台将该选取欲采样地点的位置信息发送至所述无人机。
53.具体地,在本发明的实施例当中,步骤s
200
中,所述预设的默认值范围为0.3-0.8米。
54.具体地,在本发明的实施例当中,步骤s
300
中,所述基于所述无人机离水面的距离的具体实施过程为:
55.在无人机上设置有一用于测量所述无人机离水面距离的距离传感器,通过所述距离传感器实时测量无人机距离水面的距离。
56.具体地,在本发明的实施例当中,在步骤s
400
中,所述控制所述双针头水样采集装置降落至预定深度的具体实施方式包括:
57.所述无人机上设置有一用于使所述双针头水样采集装置相对所述无人机可升降的升降装置,所述无人机控制所述升降装置带动所述双针头水样采集装置降落至预定深度。
58.具体地,在本发明的实施例当中,所述无人机还包括一信号接收器,用于接收所述无人机控制平台的控制信号,所述无人机通过所述无人机控制平台操控飞抵欲采样地点。
59.具体地,在本发明的实施例当中,所述无人机与所述双针头水样采集装置通过感应装置进行分离与合体,以实现所述无人机的自动化采水工作。
60.具体地,在本发明的实施例当中,所述采集管的内针头竖直固定在电动齿轮上,通过所述电动齿轮的转动来控制所述内针头的升降。
61.具体地,在本发明的实施例当中,所述采集管的数量为1-6个,每个所述采集管容
量不大于450毫升。
62.具体采集管的安装数量,以实际无人机的承载要求和功率决定。
63.双针头水样采集装置的工作原理为:双头采集针通过软管相连,分为内针头和外针头。内针头的初始位置与采集管的密封橡胶圈对齐,当采集水时,内针头刺破头部橡胶圈,利用压强原理采水;外针头固定在装置外表面,与水面接触,用于吸入水。当采水结束时,内针头从密封橡胶圈拔出,外针头因压强原理停止采水,采集管将自动与外界隔离。
64.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。