基于双f-p干涉仪四边缘技术的瑞利散射多普勒激光雷达系统
技术领域
1.本发明涉及一种直接探测多普勒激光雷达系统,特别涉及一种基于双f-p干涉仪四边缘技术的瑞利散射多普勒激光雷达系统。
背景技术:
2.风速是最重要的大气参数之一。实时的高精度、高时空分辨率风场数据在天气预报、环境监测、风能发电、航空航天等领域都有着重要的应用。多普勒激光雷达是近30多年来发展起来的一种新型大气风场遥感探测设备,在时空分辨率、角度方位和机动性等方面相对于传统的声雷达和微波雷达有较大的提高,而且还可探测晴天条件下的三维风场,是目前对三维风场进行高精度、高时空分辨率遥感探测的最有效工具之一。根据探测体制的不同,可分为相干探测多普勒激光雷达和直接探测多普勒激光雷达。从上世纪八十年代开始,直接探测多普勒激光雷达技术得到了迅猛的发展,先后出现了两种多普勒频率检测技术:边缘技术和条纹成像技术。相比较而言,基于双f-p干涉仪双边缘技术成熟度最高,是目前最为普遍采用的技术。针对晴空少云天气、对流层以上大气、远海海面以及临近空间移动平台等探测环境的风场测量,由于气溶胶浓度很低,主要采用korb等人在1998年提出的基于双f-p干涉仪的瑞利散射多普勒双边缘技术。但通过仔细分析发现,该技术只利用了f-p干涉仪透射信号的鉴频能力,没有利用f-p干涉仪反射信号的鉴频能力。将双f-p干涉仪的瑞利散射透反射信号均接收利用,形成瑞利散射多普勒四边缘鉴频技术,研究并设计基于双f-p干涉仪四边缘技术的瑞利散射多普勒激光雷达系统,目前还未见报道。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种基于双f-p干涉仪四边缘技术的瑞利散射多普勒激光雷达系统,在气溶胶浓度较低的大气环境下,能用基于双f-p干涉仪四边缘技术的瑞利散射多普勒激光雷达高精度探测大气风场。
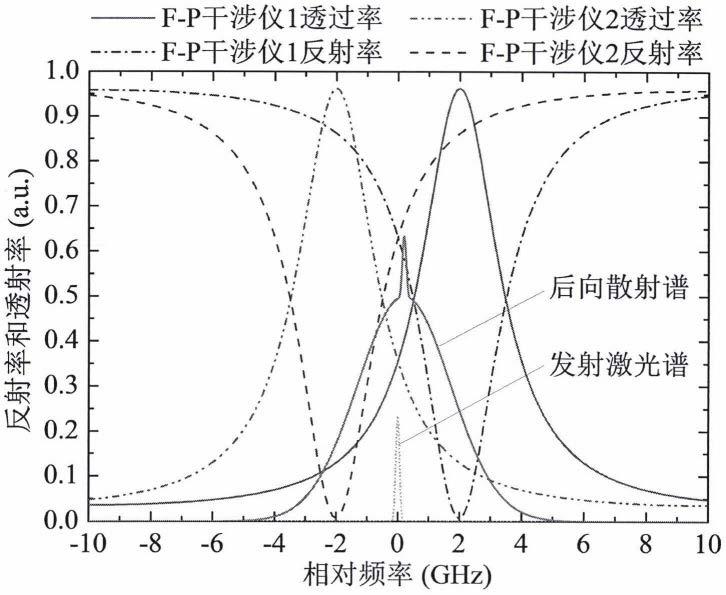
4.本发明解决其技术问题所采用的技术方案是:本发明的风场测量原理如图1所示。f-p干涉仪1和f-p干涉仪2的自由谱间距都为24ghz,谱宽都为3ghz,两者的频谱峰峰间隔为4.6ghz。f-p干涉仪1的透反射谱和f-p干涉仪2的透反射谱在两个透射谱峰间形成四个边缘。发射激光频率被锁定在f-p干涉仪1和f-p干涉仪2透射谱的交叉点附近,形成“双f-p干涉仪四边缘”探测技术。频率为v0的发射激光入射到大气中,遇到有宏观运动速度的大气分子或气溶胶粒子(即风速),由于光的多普勒效应,后向散射光的频率v将存在和激光发射方向风速分量(即径向风速)vr相对应的多普勒频移量vd=v-v0=2vr/λ,其中λ为发射激光波长。因此,后向散射光信号经过双f-p干涉仪的透过率和反射率将发生相应变化。根据双f-p干涉仪的透反射率的变化量和事先已知的透反射谱可以反演得到多普勒频移量,进而获得径向风速的大小和方向。
5.频率为v的单色平行光入射到理想的f-p干涉仪的透过率和反射率分别为:
[0006][0007][0008]
其中θ为入射角;v
fsr
=c/2nd为干涉仪自由谱间距,d为平板的间隔,n为板间的折射率,c为真空中光速;δv
1/2
为干涉仪带宽。
[0009]
然而,实际入射到f-p干涉仪的光信号是由光纤耦合,并经过准直系统后得到,故不是严格的平行光;同时,无论是发射激光,还是后向散射信号光都不是严格的单色光。此外,实际f-p干涉仪对入射光信号存在吸收和散射等影响。假设入射到实际f-p干涉仪的光信号全发散角为2θ0、频谱为高斯分布(因发射激光谱线、米后向散射谱和瑞利后向散射谱理论上都近似为高斯分布)且光强均匀,经推导该光信号经过f-p干涉仪后的透反射率分别为
[0010][0011][0012]
其中:
[0013][0014]
式中a为平板表面金属膜的吸收率;r为对应波长干涉仪平板的反射率;v=v0 vd为入射光中心频率,v0为发射中心激光频率,vd=2vr/λ为多普勒频移量;δve为高斯入射光谱1/e高度处的宽度。对于发射激光本身或米后向散射信号,δve=δva=δv/(4ln2)
1/2
,δv为激光发射谱宽(fwhm);对于瑞利后向散射信号,其中δvr=(8kt/mλ2)
1/2
,t为大气温度;λ为激光波长;k为玻耳兹曼常数;m大气分子质量。
[0015]
假定采用的双f-p干涉仪的频谱峰峰间隔为v
pp
,并以双f-p干涉仪频谱的交点位置(两个谱峰的中点)为相对频率零点,则双f-p干涉仪透反射率函数分别为
[0016][0017][0018]
其中:
[0019]
[0020][0021][0022]
其中:
[0023][0024]
假定望远镜接收到的后向散射光中米散射光强为ia,瑞利散射光强为im,则两个标准具透射和反射的瑞利散射光信号和米散射光信号分别为:
[0025][0026][0027][0028][0029][0030][0031][0032][0033]
式中:a1,a2为校准常数,这里仍取a1=a2=1/2。
[0034]
定义双f-p干涉仪的瑞利信号透反比函数:
[0035][0036][0037]
定义瑞利散射信号的频率响应函数:
[0038][0039]
则瑞利散射信号频率响应函数的速度测量灵敏度为:
[0040][0041]
风速测量信噪比为:
[0042][0043]
则风速测量误差为:
[0044][0045]
本发明的结构如图2所示。采用355nm电光调制或声光调制的脉冲光纤激光器作为发射源,从其单模保偏尾纤出射355nm窄脉冲单频线偏振光,并由光纤准直器准直扩束。准直扩束的发射光束由第一非偏振分光镜(透反比t/r=99/1)分为两束。透射光束依次经过第一偏振分光棱镜、第一四分之一波片、第一凸透镜、50m长单模保偏延时光纤跳线、离轴抛物面镜后以设定角度进入大气探测区域。大气散射信号光由离轴抛物面镜接收,依次经过50m长单模保偏延时光纤跳线、第一凸透镜、第一四分之一波片后,偏振方向旋转了90
°
,进而被第一偏振分光棱镜反射。被反射的大气散射信号光依次经过窄带干涉滤光片、第一45度反射镜、第二凸透镜、视场光阑后,由第三凸透镜准直。准直后的信号光束经过第一半波片,微调偏振方向使其与第二偏振分光棱镜和第三偏振分光棱镜的透射方向一致,再被第二非偏振分光镜均分为两束。反射光束由第二45度反射镜反射,经过第二偏振分光棱镜、第二四分之一波片后,正入射至双f-p干涉仪的f-p干涉仪1;透射光束经过第三偏振分光棱镜、第三四分之一波片后,正入射至双f-p干涉仪的f-p干涉仪2。f-p干涉仪1和f-p干涉仪2的透射光束分别由第四凸透镜和第六凸透镜会聚后,再分别由第一光电倍增管和第三光电倍增管接收;f-p干涉仪1和f-p干涉仪2的反射光束分别再次经过第二四分之一波片和第三四分之一波片,偏振方向均旋转90
°
,再分别由第二偏振分光棱镜反射、第五凸透镜会聚、第二光电倍增管接收和第三偏振分光棱镜反射、第七凸透镜会聚、第四光电倍增管接收。第一非偏振分光镜的反射光作为参考光,其先经过第二半波片使偏振方向旋转90
°
,再由第二非偏振分光镜均分为两束,接着经过与散射信号光束完全一致的光路,用于测量和锁定发射激光频率。双f-p干涉仪设计成一体,f-p干涉仪1和f-p干涉仪2的自由谱间距都为24ghz,谱宽都为3ghz,有效通光口径相同,频谱峰峰间隔为4.6ghz。发射激光频率被锁定在f-p干涉仪1和f-p干涉仪2频谱的交叉点附近。在该设计参数下,系统风速测量性能最佳。利用50m长单模保偏延时光纤跳线使参考光和后向散射信号光在时序上错开。四个光电倍增管由多通道采集卡采集,再由工控机进行数据处理、存储、数据反演以及结果显示等。整个系统的光纤脉冲激光器、双f-p干涉仪、多通道采集卡等均通过rs232接口由工控机控制。
[0046]
本发明所述的激光雷达系统由355nm脉冲光纤激光器、光纤激光器单模保偏尾纤、光纤准直器、第一非偏振分光镜、第一偏振分光棱镜、第一四分之一波片、第一凸透镜、50m长单模保偏延时光纤跳线、离轴抛物面镜、窄带干涉滤光片、第一45度反射镜、第二凸透镜、视场光阑、第三凸透镜、第一半波片、第二非偏振分光镜、第二45度反射镜、第二偏振分光棱镜、第二四分之一波片、双f-p干涉仪、第四凸透镜、第一光电倍增管、第五凸透镜、第二光电倍增管、第三偏振分光棱镜、第三四分之一波片、第六凸透镜、第三光电倍增管、第七凸透镜、第四光电倍增管、第二半波片、多通道采集卡、触发电路、f-p干涉仪控制器、激光驱动电
源和工控机组成,其特征是:355nm脉冲光纤激光器和激光驱动电源相连、激光驱动电源与触发电路相连,光纤激光器发出的连续光内部通过电光调制或声光调制,从单模保偏尾纤出射窄脉冲(脉宽30ns左右)单频线偏振光。保偏尾纤与光纤准直器相连,从激光器单模保偏尾纤出射光束先由光纤准直器准直扩束后,再经过第一非偏振分光镜(透反比t/r=99/1)分为两束。第一非偏振分光镜的透射光束依次经过第一偏振分光棱镜、第一四分之一波片、第一凸透镜、50m长单模保偏延时光纤跳线、离轴抛物面镜后以设定角度进入大气探测区域。50m长单模保偏延时光纤跳线的两个光纤端面分别位于第一凸透镜的焦点和离轴抛物面镜的焦点处。大气散射信号光由离轴抛物面镜接收,经过50m长单模保偏延时光纤跳线再次延时、第一凸透镜准直,再次经过第一四分之一波片后,偏振方向旋转90
°
,进而在经过第一偏振分光棱镜时被其反射。被第一偏振分光棱镜反射的大气散射信号光依次经过窄带干涉滤光片、第一45度反射镜、第二凸透镜、视场光阑后,由第三凸透镜准直。准直后的信号光束经过第一半波片,微调偏振方向使其与第二偏振分光棱镜和第三偏振分光棱镜的透射方向一致。从第一半波片出来的信号光被第二非偏振分光镜均分为两束,反射光束由第二45度反射镜反射后,经过第二偏振分光棱镜、第二四分之一波片,最终正入射至双f-p干涉仪的f-p干涉仪1;透射光束经过第三偏振分光棱镜、第三四分之一波片,最终正入射至双f-p干涉仪的f-p干涉仪2。透过f-p干涉仪1和f-p干涉仪2的光束分别由第四凸透镜和第六凸透镜会聚后,再分别由第一光电倍增管和第三光电倍增管接收;从f-p干涉仪1和f-p干涉仪2反射的光束分别再次经过第二四分之一波片和第三四分之一波片后,偏振方向均旋转了90
°
,分别由第二偏振分光棱镜反射、第五凸透镜会聚、第二光电倍增管接收和第三偏振分光棱镜反射、第七凸透镜会聚、第四光电倍增管接收。第一非偏振分光镜的反射光作为参考光,其先经过第二半波片,使偏振方向旋转90
°
,再由第二非偏振分光镜均分为两束。从第二非偏振分光镜反射和透射的参考光束经过与散射信号光束完全一致的光路,用于测量和锁定发射激光频率。双f-p干涉仪设计成一体,f-p干涉仪1和f-p干涉仪2的自由谱间距都为24ghz,谱宽都为3ghz,有效通光口径相同,f-p干涉仪1和f-p干涉仪2的频谱峰峰间隔为4.6ghz。发射激光频率被锁定在f-p干涉仪1和f-p干涉仪2频谱的交叉点附近。在该设计参数下,系统风速测量性能最佳。利用50m长单模保偏延时光纤跳线使参考光和后向散射信号光在时序上错开约500ns。第一光电倍增管、第二光电倍增管、第三光电倍增管、第四光电倍增管和多通道采集卡相连,多通道采集卡和触发电路相连,f-p干涉仪控制器和双f-p干涉仪相连。激光驱动电源、触发电路、f-p干涉仪控制器与工控机相连,由工控机统一控制。
[0047]
由于采用上述技术方案,本发明所具有的优点和积极效果是:与传统的瑞利多普勒双边缘技术相比,充分利用了反射信号的鉴频能力,显著提高了风速测量灵敏度,进而提高了系统的风速测量精度;在整个风速测量动态范围内,随着风速增大,系统风速测量误差的增量很小。
附图说明
[0048]
图1是本发明的风速测量原理图。
[0049]
图2是本发明的结构框图。
[0050]
图中1. 355nm脉冲光纤激光器,2.光纤激光器单模保偏尾纤,3.光纤准直器,4.第一非偏振分光镜,5.第一偏振分光棱镜,6.第一四分之一波片,7.第一凸透镜,8.50m长单模
保偏延时光纤跳线,9.离轴抛物面镜,10.窄带干涉滤光片,11.第一45度反射镜,12.第二凸透镜,13.视场光阑,14.第三凸透镜,15.第一半波片,16.第二非偏振分光镜,17.第二45度反射镜,18.第二偏振分光棱镜,19.第二四分之一波片,20.双f-p干涉仪,21.第四凸透镜,22.第一光电倍增管,23.第五凸透镜,24.第二光电倍增管,25.第三偏振分光棱镜,26.第三四分之一波片,27.第六凸透镜,28.第三光电倍增管,29.第七凸透镜,30.第四光电倍增管,31.第二半波片,32.多通道采集卡,33.触发电路,34.f-p干涉仪控制器,35.激光驱动电源,36.工控机。
具体实施方式
[0051]
本发明的结构框如2图所示。图2中355nm脉冲光纤激光器(1)和激光驱动电源(35)相连、激光驱动电源(35)与触发电路(33)相连,光纤激光器(1)发出的连续光内部通过电光调制或声光调制,从单模保偏尾纤(2)出射窄脉冲(脉宽30ns左右)单频线偏振光。单模保偏尾纤(2)与光纤准直器(3)相连。从激光器单模保偏尾纤(2)出射光束先由光纤准直器(3)准直扩束后,再经过第一非偏振分光镜(4)(透反比t/r=99/1)分为两束。第一非偏振分光镜(4)的透射光束依次经过第一偏振分光棱镜(5)、第一四分之一波片(6)、第一凸透镜(7)、50m长单模保偏延时光纤跳线(8)、离轴抛物面镜(9)后以设定角度进入大气探测区域。50m长单模保偏延时光纤跳线(8)的两个光纤端面分别位于第一凸透镜(7)的焦点和离轴抛物面镜(9)的焦点处。大气散射信号光由离轴抛物面镜(9)接收,经过50m长单模保偏延时光纤跳线(8)再次延时、第一凸透镜(7)准直,再次经过第一四分之一波片(6)后,偏振方向旋转90
°
,进而在经过第一偏振分光棱镜(5)时被其反射。被第一偏振分光棱镜(5)反射的大气散射信号光依次经过窄带干涉滤光片(10)、第一45度反射镜(11)、第二凸透镜(12)、视场光阑(13)后,由第三凸透镜(14)准直。准直后的信号光束经过第一半波片(15),微调偏振方向使其与第二偏振分光棱镜(18)和第三偏振分光棱镜(25)的透射方向一致。从第一半波片(15)出来的信号光被第二非偏振分光镜(16)均分为两束,反射光束由第二45度反射镜(17)反射后,经过第二偏振分光棱镜(18)、第二四分之一波片(19),最终正入射至双f-p干涉仪(20)的f-p干涉仪1;透射光束经过第三偏振分光棱镜(25)、第三四分之一波片(26),最终正入射至双f-p干涉仪(20)的f-p干涉仪2。透过f-p干涉仪1和f-p干涉仪2的光束分别由第四凸透镜(21)和第六凸透镜(27)会聚后,再分别由第一光电倍增管(22)和第三光电倍增管(28)接收;从f-p干涉仪1和f-p干涉仪2反射的光束分别再次经过第二四分之一波片(19)和第三四分之一波片(26)后,偏振方向均旋转了90
°
,分别由第二偏振分光棱镜(18)反射、第五凸透镜(23)会聚、第二光电倍增管(24)接收和第三偏振分光棱镜(25)反射、第七凸透镜(29)会聚、第四光电倍增管(30)接收。第一非偏振分光镜(4)的反射光作为参考光,其先经过第二半波片(31),使偏振方向旋转90
°
,再由第二非偏振分光镜(16)均分为两束。从第二非偏振分光镜(16)反射和透射的参考光束经过与散射信号光束完全一致的光路,用于测量和锁定发射激光频率。双f-p干涉仪(20)设计成一体,f-p干涉仪1和f-p干涉仪2的自由谱间距都为24ghz,谱宽都为3ghz,有效通光口径相同,频谱峰峰间隔为4.6ghz。发射激光频率被锁定在f-p干涉仪1和f-p干涉仪2频谱的交叉点附近。在该设计参数下,系统风速测量性能最佳。利用50m长单模保偏延时光纤跳线(8)使参考光和后向散射信号光在时序上错开约500ns。第一光电倍增管(22)、第二光电倍增管(24)、第三光电倍增管(28)、第四光电倍增管(30)和多
通道采集卡(32)相连,多通道采集卡(32)和触发电路(33)相连,f-p干涉仪控制器(34)和双f-p干涉仪(20)相连。激光驱动电源(35)、触发电路(33)、f-p干涉仪控制器(34)与工控机(36)相连,由工控机(36)统一控制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。