1.本发明涉及卫星定位数据处理技术领域,具体涉及一种单频周跳探测与修复方法、系统、设备及介质。
背景技术:
2.北斗卫星导航系统是我国自行研制的全球卫星导航系统,可以为全球用户提供全天候、全天时、高精度的定位、导航和授时服务,是我国重要的时空基础设施。然而,由于北斗高精度定位所依赖的载波相位观测量中存在不可避免的周跳现象,卫星定位的精度也会因此受到影响。
3.周跳是指在全球卫星导航系统技术的载波相位测量中,由于卫星信号的失锁而导致的整周计数的跳变或中断。正确地探测并恢复周跳,是我们研究卫星定位精度的一个重要方向。北斗卫星导航接收机中,单频接收机由于价格低廉,因此应用范围广泛,单频接收机通过接收l1载波信号,测定载波相位观测值,进而实现定位。
4.目前,对于单频周跳的探测与修复,常用的方法有相位减伪距法、卡尔曼滤波法,但这些方法由于噪声的存在,导致卫星定位的精度不是很高。
技术实现要素:
5.本发明所要解决的技术问题为:现有的用于单频周跳探测与修复的方法在进行周跳探测时,由于噪声的存在,对于小周跳修复精度不高,降低了卫星定位的精度。为解决该技术问题,本发明提供了一种单频周跳探测与修复方法、系统、设备及介质。
6.本发明解决上述技术问题的技术方案如下:
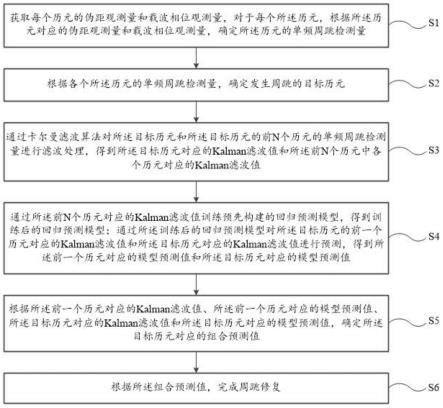
7.一种单频周跳探测与修复方法,包括:
8.步骤s1,获取每个历元的伪距观测量和载波相位观测量,对于每个所述历元,根据所述历元对应的伪距观测量和载波相位观测量,确定所述历元的单频周跳检测量;
9.步骤s2,根据各个所述历元的单频周跳检测量,确定发生周跳的目标历元;
10.步骤s3,通过卡尔曼滤波算法对所述目标历元和所述目标历元的前n个历元的单频周跳检测量进行滤波处理,得到所述目标历元对应的kalman滤波值和所述前n个历元中各个历元对应的kalman滤波值,其中,所述n为常数,所述kalman滤波值为对所述单频周跳检测量进行滤波后的单频周跳检测量;
11.步骤s4,通过所述前n个历元对应的kalman滤波值训练预先构建的回归预测模型,得到训练后的回归预测模型;通过所述训练后的回归预测模型对所述目标历元的前一个历元对应的kalman滤波值和所述目标历元对应的kalman滤波值进行预测,得到所述前一个历元对应的模型预测值和所述目标历元对应的模型预测值,所述模型预测值为单频周跳预测值;
12.步骤s5,根据所述前一个历元对应的kalman滤波值、所述前一个历元对应的模型预测值、所述目标历元对应的kalman滤波值和所述目标历元对应的模型预测值,确定所述
目标历元对应的组合预测值;
13.步骤s6,根据所述组合预测值,完成周跳修复。
14.本发明的有益效果是:根据各个历元的观测数据(即伪距观测量和载波相位观测量)确定各个历元对应的单频周跳检测量,可消除观测数据中的部分噪声;根据单频周跳检测量,确定发生周跳的目标历元,利用卡尔曼滤波算法对目标历元及目标历元前的多个历元对应的单频周跳检测量进行滤波处理,可进一步减少单频周跳检测量中的噪声;再利用滤波处理得到的kalman滤波值对回归预测模型进行在线学习训练,通过训练后的回归预测模型对目标历元及目标历元前一个历元对应的kalman滤波值进行预测,得到模型预测值,根据kalman滤波值和模型预测值,实现修复目标历元的周跳;本发明通过减少观测数据中的噪声,并联合卡尔曼滤波算法和回归预测模型,实现了对发生周跳的历元的探测与修复,提高了周跳修复精度和卫星定位的精度。
15.在上述技术方案的基础上,本发明还可以做如下改进。
16.进一步,所述根据各个所述历元的单频周跳检测量,确定发生周跳的目标历元,包括:
17.通过变分模态分解算法对每个所述单频周跳检测量进行信号分解,得到每个历元对应的多个本征模态函数分量;
18.对每个所述本征模态函数分量进行hilbert变换,得到每个所述本征模态函数分量对应的hilbert时频谱;
19.根据各个所述历元对应的hilbert时频谱与预设阈值,确定发生周跳的目标历元。
20.采用上述进一步方案的有益效果是:利用变分模态分解算法对单频周跳检测量进行信号分解,便于后续确定发生周跳的历元;通过对本征模态函数分量进行hilbert变换,再根据预设阈值确定发生周跳的历元,实现周跳的探测,为后续修复周跳奠定了基础。
21.进一步,所述根据所述组合预测值,完成周跳修复,包括:
22.将所述组合预测值替换所述目标历元的单频周跳检测量,得到目标历元对应的目标单频周跳检测量;
23.根据所述目标历元对应的目标单频周跳检测量、载波相位观测量和伪距观测量,以及所述目标历元的后一个历元的载波相位观测量和伪距观测量,确定所述目标历元对应的目标载波相位观测量;
24.将所述目标历元对应的目标载波相位观测量替换所述目标历元的载波相位观测量,完成周跳修复。
25.采用上述进一步方案的有益效果是:通过将组合预测值替换目标历元的单频周跳检测量,根据目标历元对应的目标单频周跳检测量、载波相位观测量和伪距观测量,以及目标历元的后一个历元的载波相位观测量和伪距观测量,确定目标历元对应的目标载波相位观测量,从而实现周跳的修复,提高了卫星定位的精度。
26.进一步,所述步骤s1中,所述获取每个历元的伪距观测量和载波相位观测量,具体包括:
27.通过单频接收机获取每个历元的伪距观测量和载波相位观测量,对于每个所述历元,该历元的伪距观测量和载波相位观测量分别为:
28.ρ
t
=r
t
i
t
t
t
δ
r,t-δ
s,t
ε
ρ,t
[0029][0030]
其中,ρ
t
和分别为历元t对应的伪距观测量和载波相位观测量,r
t
表示在历元t时单频接收机与卫星之间的几何距离,λ表示载波波长,n
t
表示整周模糊度,i
t
和t
t
分别表示历元t对应的电离层延迟误差和对流层延迟误差,δ
r,t
和δ
s,t
分别表示历元t对应的接收机钟差和卫星钟差,ε
ρ,t
和分别表示历元t对应的所述伪距观测量的综合误差和所述载波相位观测量的综合误差,所述伪距观测量的综合误差包括多路径效应和伪距观测噪声,所述载波相位观测量的综合误差包括多路径效应和载波相位观测噪声;
[0031]
所述步骤s1中,对于每个所述历元,根据所述历元对应的伪距观测量和载波相位观测量,确定所述历元的单频周跳检测量,具体包括:
[0032]
对于每个所述历元,将所述历元对应的载波相位观测量和所述伪距观测量作差,得到所述历元对应的观测量差量;
[0033]
对于每个所述历元,根据所述历元对应的观测量差量、所述历元的下一个历元对应的观测量差量和载波波长,确定所述历元的单频周跳检测量。
[0034]
采用上述进一步方案的有益效果是:根据获取的伪距观测量和载波相位观测量构造出单频周跳检测量,为后续探测单频周跳奠定了基础。
[0035]
进一步,在通过变分模态分解算法对每个所述单频周跳检测量进行信号分解之前,所述方法还包括:
[0036]
调整所述变分模态分解算法中的参数k和α,其中,参数k表示分解层数,参数α表示惩罚因子。
[0037]
采用上述进一步方案的有益效果是:通过调整参数k和α,以使变分模态分解算法对单频周跳检测量的分解达到最优,再利用参数调整后的变分模态分解算法对单频周跳检测量进行信号分解,便于后续确定发生周跳的历元。
[0038]
进一步,所述预设阈值为3倍标准差;
[0039]
所述根据各个所述历元对应的hilbert时频谱与预设阈值,确定发生周跳的目标历元,具体包括:
[0040]
对于每个历元,确定该历元对应的hilbert时频谱中的最大幅值;
[0041]
当各所述最大幅值中存在大于3倍标准差的最大幅值时,将所述大于3倍标准差的最大幅值对应的历元确定为发生周跳的目标历元。
[0042]
采用上述进一步方案的有益效果是:通过对本征模态函数分量进行hilbert变换,再基于三倍标准差准则确定发生周跳的历元,为后续修复周跳奠定了基础。
[0043]
进一步,所述步骤s5中,所述根据所述前一个历元对应的kalman滤波值、所述前一个历元对应的模型预测值、所述目标历元对应的kalman滤波值和所述目标历元对应的模型预测值,确定所述目标历元对应的组合预测值,具体包括:
[0044]
确定所述前一个历元的单频周跳检测量与kalman滤波值之间的第一标准差σ
k-1,r
;
[0045]
确定所述前一个历元的单频周跳检测量与模型探测值之间的第二标准差σ
e-1,r
;
[0046]
确定所述目标历元对应的kalman滤波值的第一权重wk和所述目标历元对应的模型预测值的第二权重we;
[0047]
根据所述第一权重wk和所述第二权重we,对所述目标历元对应的kalman滤波值和
所述目标历元对应的模型预测值进行加权求和,得到所述目标历元对应的组合预测值。
[0048]
采用上述进一步方案的有益效果是:基于发生周跳的历元的前一个历元对应的kalman滤波值、模型预测值设定权重,再根据设定的权重确定发生周跳的历元对应的组合预测值,实现对目标历元的kalman滤波值和模型预测值进行校正,解决了单独使用回归预测模型进行周跳探测与修复存在的容易陷入局部最小值,以及单独使用卡尔曼滤波算法进行周跳探测与修复存在的欠滤波状态或过渡滤波状态,造成周跳修复精度不高的问题,提高了卫星定位精度。
[0049]
为解决上述技术问题,本发明还提供了一种单频周跳探测与修复系统,包括:
[0050]
数据预处理模块,用于获取每个历元的伪距观测量和载波相位观测量,对于每个所述历元,根据所述历元对应的伪距观测量和载波相位观测量,确定所述历元的单频周跳检测量;
[0051]
周跳探测模块,用于根据各个所述历元的单频周跳检测量,确定发生周跳的目标历元;
[0052]
滤波处理模块,用于通过卡尔曼滤波算法对所述目标历元和所述目标历元的前n个历元的单频周跳检测量进行滤波处理,得到所述目标历元对应的kalman滤波值和所述前n个历元中各个历元对应的kalman滤波值,其中,所述n为常数,所述kalman滤波值为对所述单频周跳检测量进行滤波后的单频周跳检测量;
[0053]
模型处理模块,用于通过所述前n个历元对应的kalman滤波值训练预先构建的回归预测模型,得到训练后的回归预测模型;通过所述训练后的回归预测模型对所述目标历元的前一个历元对应的kalman滤波值和所述目标历元对应的kalman滤波值进行预测,得到所述前一个历元对应的模型预测值和所述目标历元对应的模型预测值,所述模型预测值为单频周跳预测值;
[0054]
周跳预测模块,用于根据所述前一个历元对应的kalman滤波值、所述前一个历元对应的模型预测值、所述目标历元对应的kalman滤波值和所述目标历元对应的模型预测值,确定所述目标历元对应的组合预测值;
[0055]
周跳修复模块,用于根据所述组合预测值,完成周跳修复。
[0056]
为解决上述技术问题,本发明还提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如前所述的单频周跳探测与修复方法。
[0057]
为解决上述技术问题,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如前所述的单频周跳探测与修复方法。
附图说明
[0058]
图1为本发明的方法流程示意图;
[0059]
图2为本发明实施例一中单频周跳检测量的示意图;
[0060]
图3为本发明对图2的单频周跳检测量进行信号分解得到的本征模态函数分量的示意图;
[0061]
图4为本发明的方法与现有方法对单频周跳进行修复的结果示意图;
[0062]
图5为本发明的方法与现有方法对单频周跳进行修复的误差示意图;
[0063]
图6为本发明的系统结构示意图;
[0064]
图7为本发明的电子设备结构示意图。
具体实施方式
[0065]
以下对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
[0066]
实施例一
[0067]
本实施例提供了一种单频周跳探测与修复方法,如图1所示,包括:
[0068]
步骤s1,通过单频接收机获取每个历元的伪距观测量和载波相位观测量,对于每个所述历元,根据所述历元对应的伪距观测量和载波相位观测量,确定所述历元的单频周跳检测量。
[0069]
其中,所述步骤s1中,所述单频接收机只能接收l1载波信号,测定载波相位观测量进行定位,对于每个所述历元,该历元的伪距观测量和载波相位观测量分别为:
[0070]
ρ
t
=r
t
i
t
t
t
δ
r,t-δ
s,t
ε
ρ,t
[0071][0072]
其中,ρ
t
和分别为历元t对应的伪距观测量和载波相位观测量,r
t
表示在历元t时单频接收机与卫星之间的几何距离,λ表示载波波长,n
t
表示整周模糊度,i
t
和t
t
分别表示历元t对应的电离层延迟误差和对流层延迟误差,δ
r,t
和δ
s,t
分别表示历元t对应的接收机钟差和卫星钟差,ε
ρ,t
和分别表示历元t对应的所述伪距观测量的综合误差和所述载波相位观测量的综合误差,所述伪距观测量的综合误差包括多路径效应和伪距观测噪声,所述载波相位观测量的综合误差包括多路径效应和载波相位观测噪声。
[0073]
对于每个所述历元,根据所述历元对应的伪距观测量和载波相位观测量,确定所述历元的单频周跳检测量,具体包括:
[0074]
对于每个所述历元,将所述历元对应的载波相位观测量和所述伪距观测量作差,以消除几何距离、接收机钟差、卫星钟差和对流层延迟误差,得到所述历元对应的观测量差量;
[0075]
对于每个所述历元,根据所述历元对应的观测量差量、所述历元的下一个历元对应的观测量差量和载波波长,确定所述历元的单频周跳检测量。例如,对于历元t,其单频周跳检测量为:
[0076][0077]
其中,d(t)表示历元t的单频周跳观测量,分别为历元t 1、历元t对应的载波相位观测量,ρ
t 1
、ρ
t
分别为历元t 1、历元t对应的伪距观测量,λ表示载波波长。
[0078]
步骤s2,根据各个所述历元的单频周跳检测量,确定发生周跳的目标历元。
[0079]
其中,所述步骤s2具体包括:
[0080]
通过变分模态分解算法对每个所述单频周跳检测量进行信号分解,得到每个历元对应的多个本征模态函数分量(简称imf);
[0081]
对每个所述本征模态函数分量进行hilbert变换,得到每个所述本征模态函数分量对应的hilbert时频谱;
[0082]
根据各个所述历元对应的hilbert时频谱与预设阈值,确定发生周跳的目标历元。
[0083]
进一步,在通过变分模态分解算法对每个所述单频周跳检测量进行信号分解之前,所述方法还包括:
[0084]
调整所述变分模态分解算法中的参数k和α,其中,参数k表示分解层数,参数α表示惩罚因子。通过调整参数k和α,以使变分模态分解算法对单频周跳检测量的分解达到最优。本实施例中,参数k的取值可以为6,参数α的取值可以为1000。
[0085]
本实施例中,所述预设阈值为3倍标准差(3σ)。
[0086]
所述根据各个所述历元对应的hilbert时频谱与预设阈值,确定发生周跳的目标历元,具体包括:
[0087]
对于每个历元,确定该历元对应的hilbert时频谱中的最大幅值;
[0088]
当各所述最大幅值中存在大于3倍标准差的最大幅值时,将所述大于3倍标准差的最大幅值对应的历元确定为发生周跳的目标历元。
[0089]
步骤s3,通过卡尔曼滤波算法对所述目标历元和所述目标历元的前n个历元的单频周跳检测量进行滤波处理,得到所述目标历元对应的kalman滤波值和所述前n个历元中各个历元对应的kalman滤波值,其中,所述n为常数,所述kalman滤波值为对所述单频周跳检测量进行滤波后的单频周跳检测量。本实施例中,n的取值为60。
[0090]
进一步,在通过卡尔曼滤波算法对所述目标历元和所述目标历元的前n个历元的单频周跳检测量进行滤波处理之前,该方法还包括:
[0091]
根据所述目标历元的前n个历元的单频周跳检测量调整卡尔曼滤波算法中的参数q和r,其中,参数q表示角度数据置信度,参数r表示角速度数据置信度。通过调整参数q和r,以减少获取到的所述伪距观测量和所述载波相位观测量中的噪声,即减少所述单频周跳检测量中的噪声,提高对目标历元和目标历元的前n个历元的单频周跳检测量进行滤波处理的准确性,再利用目标历元的前n个历元对应的kalman滤波值作为训练集输入回归预测模型,减少训练集噪声干扰,提高回归预测模型对待预测数据的预测准确率,以提高对周跳进行修复的准确度。
[0092]
步骤s4,通过所述前n个历元对应的kalman滤波值训练预先构建的回归预测模型,得到训练后的回归预测模型;通过所述训练后的回归预测模型对所述目标历元的前一个历元对应的kalman滤波值和所述目标历元对应的kalman滤波值进行预测,得到所述前一个历元对应的模型预测值和所述目标历元对应的模型预测值,所述模型预测值为单频周跳预测值。
[0093]
本实施例中,所述回归预测模型选用对非线性时间序列建模效果良好的elman神经网络,elman神经网络结构中,输入层、隐含层、输出层的层数比值为2:6:1,利用所述前n个历元对应的kalman滤波值对elman神经网络进行在线学习,得到训练后的elman神经网络,利用所述训练后的elman神经网络对所述目标历元的前一个历元对应的kalman滤波值和所述目标历元对应的kalman滤波值进行预测,得到所述前一个历元对应的elman神经网络预测值和所述目标历元对应的elman神经网络预测值。
[0094]
步骤s5,根据所述前一个历元对应的kalman滤波值、所述前一个历元对应的模型
预测值、所述目标历元对应的kalman滤波值和所述目标历元对应的模型预测值,确定所述目标历元对应的组合预测值。
[0095]
其中,所述步骤s5具体包括:
[0096]
确定所述前一个历元的单频周跳检测量与kalman滤波值之间的第一标准差σ
k-1,r
;
[0097]
确定所述前一个历元的单频周跳检测量与模型探测值之间的第二标准差σ
e-1,r
;
[0098]
确定所述目标历元对应的kalman滤波值的第一权重wk和所述目标历元对应的模型预测值的第二权重we;
[0099]
根据所述第一权重wk和所述第二权重we,对所述目标历元对应的kalman滤波值和所述目标历元对应的模型预测值进行加权求和,得到所述目标历元对应的组合预测值。其中,所述目标历元对应的组合预测值为:
[0100][0101]
其中,dr为所述目标历元对应的组合预测值,dk为所述目标历元对应的kalman滤波值,de为所述目标历元对应的模型预测值。
[0102]
步骤s6,根据所述组合预测值,完成周跳修复。
[0103]
其中,所述步骤s6具体包括:
[0104]
将所述组合预测值替换所述目标历元的单频周跳检测量,得到目标历元对应的目标单频周跳检测量;
[0105]
根据所述目标历元对应的目标单频周跳检测量、载波相位观测量和伪距观测量,以及所述目标历元的后一个历元的载波相位观测量和伪距观测量,确定所述目标历元对应的目标载波相位观测量;
[0106]
将所述目标历元对应的目标载波相位观测量替换所述目标历元的载波相位观测量,完成周跳修复。例如,对于目标历元t,其目标单频周跳检测量为:
[0107][0108]
其中,d(t)'表示历元t的目标单频周跳观测量,分别为历元t 1、历元t对应的载波相位观测量、目标载波相位观测量,ρ
t 1
、ρ
t
分别为历元t 1、历元t对应的伪距观测量,λ表示载波波长。
[0109]
为了进一步加深对本技术方案的理解,以下文所描述的仿真实验为例进行进一步的说明:
[0110]
(1)实验条件
[0111]
实验设备:北斗星通接收机
[0112]
实验平台:matlab r2020a软件
[0113]
(2)实验内容
[0114]
利用北斗星通接收机采集历元间隔为5s的北斗b1频段实测数据(实测数据包括伪距观测量和载波相位观测量),选取496个历元对应的北斗b1频段实测数据组成单频实验数据,采样频率为1hz。
[0115]
本方法首先根据获取的北斗b1频段实测数据确定每个历元的单频周跳检测量,其
次利用变分模态分解算法对所述单频周跳检测量进行信号分解,得到6个本征模态函数分量,对每个所述本征模态函数分量进行hilbert变换,从而确定发生周跳的目标历元,接着获取目标历元的前60个历元的载波相位观测量,得到单频周跳检测量集合,根据所述单频周跳检测量集合调整卡尔曼滤波算法中的参数q和r,根据调整后得到的卡尔曼滤波算法对所述目标历元的前60个历元的载波相位观测量和所述目标历元的单频周跳检测量进行滤波处理,得到各个历元对应的kalman滤波值,随后将所述目标历元的前60个历元的单频周跳检测量对应的kalman滤波值作为训练集,利用所述训练集对回归预测模型进行在线学习,得到训练后的回归预测模型,利用所述训练后的回归预测模型对所述目标历元的前一历元对应的kalman滤波值和所述目标历元对应的kalman滤波值进行预测,得到所述目标历元的前一历元对应的模型预测值和所述目标对应的模型预测值。然后根据所述目标历元的前一历元对应的kalman滤波值和模型预测值、所述目标历元对应的kalman滤波值和模型预测值,确定所述目标历元对应的组合预测值,最后将所述组合预测值替换所述目标历元的单频周跳检测量,得到目标历元对应的目标单频周跳检测量,根据所述目标历元对应的目标单频周跳检测量、载波相位观测量和伪距观测量,以及所述目标历元的后一个历元的载波相位观测量和伪距观测量,确定所述目标历元对应的目标载波相位观测量,将所述目标历元对应的目标载波相位观测量替换所述目标历元的载波相位观测量,完成周跳修复。
[0116]
(3)实验结果
[0117]
以图2中的单频周跳检测量为例,利用变分模态分解算法对其进行信号分解,得到6个本征模态函数分量,对得到的6个本征模态函数分量进行hilbert变换,变换结果如图3所示。根据3倍标准差准则可以得知,第3个本征模态函数分量(imf3)和第5个本征模态函数分量(imf5)中有发生周跳的历元。
[0118]
图4中,横轴表示历元,纵轴表示差分观测量(即单频周跳检测量),原始值表示未进行周跳探测与修复前,根据实测数据得到的单频周跳检测量,“elman神经网络”预测值表示单独使用elman神经网络对周跳进行周跳探测及修复得到的用于替换单频周跳检测量的预测值,“kalman滤波值”表示单独使用卡尔曼滤波算法进行周跳探测及修复得到的用于替换单频周跳检测量的预测值,“组合预测值”表示采用本方法进行周跳探测及修复得到的用于替换单频周跳检测量的预测值。
[0119]
根据图4可以看出,使用单一预测模型(卡尔曼滤波算法或elman神经网络)预测及修复周跳时,很容易得到超过1周的差分观测量,如卡尔曼滤波算法在历元64、65时的差分观测量的绝对值大于1,elman神经网络在历元65时的差分观测量的绝对值也大于1,表明使用单一预测模型对周跳进行修复的效果并不理想,而通过本方法得到的所有差分观测量的绝对值均保持在0.5周以内,可见,本方法能够很好的探测并修复周跳。
[0120]
图5中,横轴表示历元,纵轴表示误差,即通过不同方法进行周跳探测及修复得到的用于替换单频周跳检测量的预测值减去单频周跳检测量得到的差值,“elman神经网络”表示单独使用elman神经网络对周跳进行周跳探测及修复后得到的误差,“kalman滤波”表示单独使用卡尔曼滤波算法进行周跳探测及修复后得到的误差,“kf-elman组合”表示采用本方法进行周跳探测及修复后得到的误差,通过本方法进行周跳探测及修复得到的用于替换单频周跳检测量的预测值即组合预测值。
[0121]
根据图5可以看出,通过本方法对周跳进行预测及修复所得到的误差的绝对值在
0.5以内,而通过单一预测模型对周跳进行预测及修复所得到的误差的绝对值超过0.5,可见,本方法对周跳的修复效果优于单一预测模型对周跳的修复效果。
[0122]
实施例二
[0123]
基于与上述一种单频周跳探测与修复方法相同的原理,本实施例提供了一种单频周跳探测与修复系统,如图6所示,包括:
[0124]
数据预处理模块,用于获取每个历元的伪距观测量和载波相位观测量,对于每个所述历元,根据所述历元对应的伪距观测量和载波相位观测量,确定所述历元的单频周跳检测量。
[0125]
周跳探测模块,用于根据各个所述历元的单频周跳检测量,确定发生周跳的目标历元。
[0126]
所述周跳探测模块包括:
[0127]
信号分解单元,用于通过变分模态分解算法对每个所述单频周跳检测量进行信号分解,得到每个历元对应的多个本征模态函数分量;
[0128]
hilbert变换单元,用于对每个所述本征模态函数分量进行hilbert变换,得到每个所述本征模态函数分量对应的hilbert时频谱;
[0129]
周跳确定单元,用于根据各个所述历元对应的hilbert时频谱与预设阈值,确定发生周跳的目标历元。
[0130]
进一步,所述周跳探测模块还包括:
[0131]
参数调整单元a,用于调整所述变分模态分解算法中的参数k和α,其中,参数k表示分解层数,参数α表示惩罚因子。
[0132]
滤波处理模块,用于通过卡尔曼滤波算法对所述目标历元和所述目标历元的前n个历元的单频周跳检测量进行滤波处理,得到所述目标历元对应的kalman滤波值和所述前n个历元中各个历元对应的kalman滤波值,其中,所述n为常数,所述kalman滤波值为对所述单频周跳检测量进行滤波后的单频周跳检测量。
[0133]
进一步,所述滤波处理模块还包括:
[0134]
参数调整单元b,用于根据所述目标历元的前n个历元的单频周跳检测量调整卡尔曼滤波算法中的参数q和r,其中,参数q表示角度数据置信度,参数r表示角速度数据置信度。
[0135]
模型处理模块,用于通过所述前n个历元对应的kalman滤波值训练预先构建的回归预测模型,得到训练后的回归预测模型;通过所述训练后的回归预测模型对所述目标历元的前一个历元对应的kalman滤波值和所述目标历元对应的kalman滤波值进行预测,得到所述前一个历元对应的模型预测值和所述目标历元对应的模型预测值,所述模型预测值为单频周跳预测值。
[0136]
周跳预测模块,用于根据所述前一个历元对应的kalman滤波值、所述前一个历元对应的模型预测值、所述目标历元对应的kalman滤波值和所述目标历元对应的模型预测值,确定所述目标历元对应的组合预测值。
[0137]
所述周跳预测模块包括:
[0138]
标准差确定单元,用于确定所述前一个历元的单频周跳检测量与kalman滤波值之间的第一标准差σ
k-1,r
,以及确定所述前一个历元的单频周跳检测量与模型探测值之间的第
二标准差σ
e-1,r
;
[0139]
权重确定单元,用于确定所述目标历元对应的kalman滤波值的第一权重wk和所述目标历元对应的模型预测值的第二权重we;
[0140]
预测值确定单元,用于根据所述第一权重wk和所述第二权重we,对所述目标历元对应的kalman滤波值和所述目标历元对应的模型预测值进行加权求和,得到所述目标历元对应的组合预测值。
[0141]
周跳修复模块,用于根据所述组合预测值,完成周跳修复。
[0142]
实施例三
[0143]
本实施例提供了一种电子设备,如图7所示,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如实施例一所述的单频周跳探测与修复方法。
[0144]
实施例四
[0145]
本实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如实施例一所述的单频周跳探测与修复方法。
[0146]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。