一种ccd自对贴合对位装置
技术领域
1.本实用新型涉及贴合对位技术领域,具体为一种ccd自对贴合对位装置。
背景技术:
2.在生产液晶显示屏、手机等各种电子产品时,需要将物体放置在贴合对位装置上进行tp与液晶模组贴合定位、手机组件与背光膜贴合定位、手机外壳与辅料贴合定位、屏幕与背光板贴合定位等操作,贴合对位装置上通常安装有含有ccd的摄像头,摄像头内的ccd用耦合方式传输信号进行探测,并且自动扫描,自动感受波普范围的宽度,ccd需要拍其中一个物体的位置去调整该物体,再去对位贴合另一个物体,然而,市场上现有的贴合对位装置的摄像头长期使用后,摄像头表面会粘附有大量的空气中的灰尘,工作人员需要定期对摄像头进行清理,这无疑是增加了贴合对位时的劳动量,降低了电子产品的生产效率。
技术实现要素:
3.本实用新型的目的在于提供一种ccd自对贴合对位装置,以解决上述背景技术中提出的市场上现有的贴合对位装置的摄像头长期使用后,摄像头表面会粘附有大量的空气中的灰尘,工作人员需要定期对摄像头进行清理,这无疑是增加了贴合对位时的劳动量,降低了电子产品的生产效率的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种ccd自对贴合对位装置,包括贴合对位架,所述贴合对位架的一侧固定安装有清理机构,所述贴合对位架内壁底端的一侧固定安装有放置机构,所述贴合对位架上固定安装有位于放置机构一侧的视觉架,所述视觉架的内侧固定安装有ccd相机,所述贴合对位架的内部转动连接有平移螺纹柱,所述贴合对位架上固定安装有位于平移螺纹柱上方的滑行杆,所述平移螺纹柱的中部螺纹连接有与滑行杆滑动连接的位移块,所述位移块的底端固定安装有机械手,ccd相机通电后启动,ccd相机自动扫描,获得带贴合的物品较为完整的数字图像和位置信息,并且进行了储存、传输、处理等一系列过程。
5.优选的,所述清理机构包括清理架、抽取管道、气泵、输送软管、喷气板、安装板、角度气缸、立板和方向座,所述清理架的顶端固定安装有气泵,所述气泵的进气口固定连通有抽取管道,所述气泵的出气口固定连通有输送软管,所述输送软管远离气泵的一端固定连通有喷气板,所述喷气板的一侧固定安装有安装板,所述安装板远离喷气板的一侧与角度气缸的活动端转动连接,所述角度气缸的固定端与立板的一侧转动连接,所述安装板的底端转动连接有方向座,气泵通电后启动,气泵通过抽取管道抽取外环境中的气体,抽取到的气体通过输送软管输送至喷气板内,喷气板将气体均匀喷出,对ccd相机表面粘附的杂质进行清理,角度气缸上电磁阀打开,往角度气缸内输入压缩空气,推动活塞在角度气缸筒内做往复运动,角度气缸进行伸缩运动,角度气缸从一侧推动安装板,安装板沿着方向座发生角度偏转,安装板偏转时带动喷气板进行同步运动,对喷气板的喷气角度进行调节。
6.优选的,所述清理架的一侧与贴合对位架固定连接,所述方向座的底端和立板的
底端均与贴合对位架顶端的一侧固定连接,清理机构通过清理架、立板和方向座安装在贴合对位架上。
7.优选的,所述放置机构包括固定壳、升降螺纹柱、两个滑行块、放置台、两个固定座和两个角度杆,所述固定壳的内部转动连接有升降螺纹柱,所述升降螺纹柱的表面螺纹连接有两个滑行块,两个所述滑行块的顶端均转动连接有角度杆,两个所述角度杆远离滑行块的一端均转动连接有固定座,两个所述固定座的顶端分别与放置台底端的两侧固定连接,所述放置台的顶端开设有若干个放置槽,两个滑行块滑动的过程中与固定座之间的距离发生改变,滑行块与固定座支架的角度杆发生角度偏转,角度杆从固定座的底端向上推动,固定座带动放置台进行同步运动,放置台进行升降运动,待对位贴合的物品放置在放置槽上。
8.优选的,所述固定壳的底端与贴合对位架固定连接,所述固定壳的一侧固定安装有伺服电机,所述伺服电机的输出端穿过固定壳与升降螺纹柱相邻的一端固定连接,伺服电机通电后启动,伺服电机带动升降螺纹柱转动,升降螺纹柱以自身的中心线为分界线开设两个方向相反的螺纹,两个滑行块内壁的螺纹与升降螺纹柱表面的螺纹相互匹配,两个滑行块受到角度杆的限位,所以两个滑行块沿着升降螺纹柱发生滑动。
9.优选的,所述机械手包括机械架、夹持气缸、夹持壳、两个夹爪、两个扭矩杆、推动块和两个活动块,所述机械架的底端固定安装有夹持壳,所述夹持壳内壁的两侧均开设有活动槽,两个所述活动槽的内部滑动连接有活动块,两个所述活动块的中部均固定安装有贯穿夹持壳的夹爪,所述机械架的中部固定安装有夹持气缸,所述夹持气缸的活动端穿过夹持壳固定安装有推动块,两个所述活动块的一侧均转动连接有扭矩杆,两个所述扭矩杆远离活动块的一端分别与推动块的两侧转动连接,夹持气缸上电磁阀打开,往夹持气缸内输入压缩空气,推动活塞在夹持气缸筒内做往复运动,夹持气缸进行伸缩运动,夹持气缸从一侧带动推动块进行滑动,推动块滑动的过程中带动扭矩杆进行同步运动,扭矩杆另一端安装在活动块上,活动块沿着活动槽内发生滑动,活动块滑动的过程中带动两个夹爪进行相对运动,两个夹爪分别从物体的两侧进行夹持。
10.优选的,所述机械架的顶端与位移块固定连接,所述贴合对位架的表面固定安装有马达,所述马达的输出端穿过贴合对位架与平移螺纹柱相邻的一端固定连接,马达通电后启动,马达带动平移螺纹柱转动,平移螺纹柱表面的螺纹与位移块内壁的螺纹相互匹配,位移块受到滑行杆限位,所以位移块沿着平移螺纹柱发生滑动,位移块滑行的过程中带动机械手进行同步运动。
11.与现有技术相比,本实用新型的有益效果是:通过设置清理机构,气泵抽取外环境中的气体,抽取到的气体通过输送软管输送至喷气板,喷气板将气体均匀喷出,对ccd相机表面粘附的杂质进行清理,取代传统工作人员手工对摄像头进行清理,降低了贴合对位时的劳动量,ccd相机对待贴合物体的位置进行确定,机械手夹持贴合物体与放置槽内的物体对位,实现两个物体之间的贴合,提高了电子产品的生产效率。
附图说明
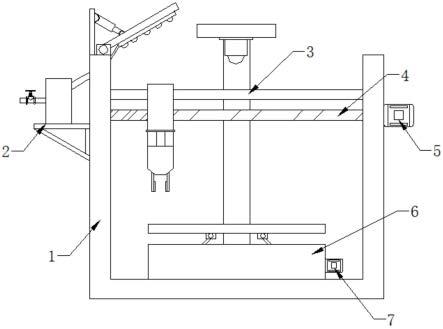
12.图1为本实用新型的侧视图;
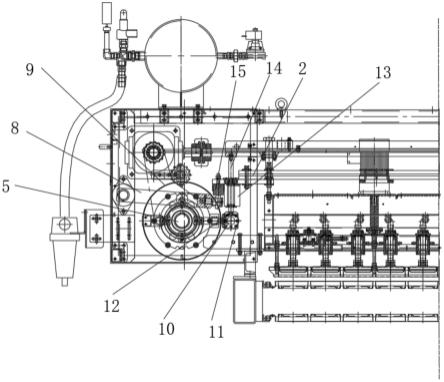
13.图2为本实用新型的内部示意图;
14.图3为本实用新型放置机构与伺服电机的连接图;
15.图4为本实用新型机械手的内部示意图;
16.图5为本实用新型清理机构的侧视图。
17.图中:1、贴合对位架;2、清理机构;21、清理架;22、抽取管道;23、气泵;24、输送软管;25、喷气板;26、安装板;27、角度气缸;28、立板;29、方向座;3、滑行杆;4、平移螺纹柱;5、马达;6、放置机构;61、固定壳;62、升降螺纹柱;63、滑行块;64、放置台;65、固定座;66、角度杆;67、放置槽;7、伺服电机;8、位移块;9、机械手;91、机械架;92、夹持气缸;93、夹持壳;94、夹爪;95、扭矩杆;96、推动块;97、活动块;98、活动槽;10、视觉架;11、ccd相机。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
19.请参阅图1-5,本实用新型提供了一种ccd自对贴合对位装置,包括贴合对位架1,贴合对位架1的一侧固定安装有清理机构2,贴合对位架1内壁底端的一侧固定安装有放置机构6,贴合对位架1上固定安装有位于放置机构6一侧的视觉架10,视觉架10的内侧固定安装有ccd相机11,贴合对位架1的内部转动连接有平移螺纹柱4,贴合对位架1上固定安装有位于平移螺纹柱4上方的滑行杆3,平移螺纹柱4的中部螺纹连接有与滑行杆3滑动连接的位移块8,位移块8的底端固定安装有机械手9,ccd相机11通电后启动,ccd相机11自动扫描,获得带贴合的物品较为完整的数字图像和位置信息,并且进行了储存、传输、处理等一系列过程。
20.清理机构2包括清理架21、抽取管道22、气泵23、输送软管24、喷气板25、安装板26、角度气缸27、立板28和方向座29,清理架21的顶端固定安装有气泵23,气泵23的进气口固定连通有抽取管道22,气泵23的出气口固定连通有输送软管24,输送软管24远离气泵23的一端固定连通有喷气板25,喷气板25的一侧固定安装有安装板26,安装板26远离喷气板25的一侧与角度气缸27的活动端转动连接,角度气缸27的固定端与立板28的一侧转动连接,安装板26的底端转动连接有方向座29,气泵23通电后启动,气泵23通过抽取管道22抽取外环境中的气体,抽取到的气体通过输送软管24输送至喷气板25内,喷气板25将气体均匀喷出,对ccd相机11表面粘附的杂质进行清理,角度气缸27上电磁阀打开,往角度气缸27内输入压缩空气,推动活塞在角度气缸27筒内做往复运动,角度气缸27进行伸缩运动,角度气缸27从一侧推动安装板26,安装板26沿着方向座29发生角度偏转,安装板26偏转时带动喷气板25进行同步运动,对喷气板25的喷气角度进行调节。
21.清理架21的一侧与贴合对位架1固定连接,方向座29的底端和立板28的底端均与贴合对位架1顶端的一侧固定连接,清理机构2通过清理架21、立板28和方向座29安装在贴合对位架1上。
22.放置机构6包括固定壳61、升降螺纹柱62、两个滑行块63、放置台64、两个固定座65和两个角度杆66,固定壳61的内部转动连接有升降螺纹柱62,升降螺纹柱62的表面螺纹连接有两个滑行块63,两个滑行块63的顶端均转动连接有角度杆66,两个角度杆66远离滑行块63的一端均转动连接有固定座65,两个固定座65的顶端分别与放置台64底端的两侧固定连接,放置台64的顶端开设有若干个放置槽67,两个滑行块63滑动的过程中与固定座65之
间的距离发生改变,滑行块63与固定座65支架的角度杆66发生角度偏转,角度杆66从固定座65的底端向上推动,固定座65带动放置台64进行同步运动,放置台64进行升降运动,待对位贴合的物品放置在放置槽67上。
23.固定壳61的底端与贴合对位架1固定连接,固定壳61的一侧固定安装有伺服电机7,伺服电机7的输出端穿过固定壳61与升降螺纹柱62相邻的一端固定连接,伺服电机7通电后启动,伺服电机7带动升降螺纹柱62转动,升降螺纹柱62以自身的中心线为分界线开设两个方向相反的螺纹,两个滑行块63内壁的螺纹与升降螺纹柱62表面的螺纹相互匹配,两个滑行块63受到角度杆66的限位,所以两个滑行块63沿着升降螺纹柱62发生滑动。
24.机械手9包括机械架91、夹持气缸92、夹持壳93、两个夹爪94、两个扭矩杆95、推动块96和两个活动块97,机械架91的底端固定安装有夹持壳93,夹持壳93内壁的两侧均开设有活动槽98,两个活动槽98的内部滑动连接有活动块97,两个活动块97的中部均固定安装有贯穿夹持壳93的夹爪94,机械架91的中部固定安装有夹持气缸92,夹持气缸92的活动端穿过夹持壳93固定安装有推动块96,两个活动块97的一侧均转动连接有扭矩杆95,两个扭矩杆95远离活动块97的一端分别与推动块96的两侧转动连接,夹持气缸92上电磁阀打开,往夹持气缸92内输入压缩空气,推动活塞在夹持气缸92筒内做往复运动,夹持气缸92进行伸缩运动,夹持气缸92从一侧带动推动块96进行滑动,推动块96滑动的过程中带动扭矩杆95进行同步运动,扭矩杆95另一端安装在活动块97上,活动块97沿着活动槽98内发生滑动,活动块97滑动的过程中带动两个夹爪94进行相对运动,两个夹爪94分别从物体的两侧进行夹持。
25.机械架91的顶端与位移块8固定连接,贴合对位架1的表面固定安装有马达5,马达5的输出端穿过贴合对位架1与平移螺纹柱4相邻的一端固定连接,马达5通电后启动,马达5带动平移螺纹柱4转动,平移螺纹柱4表面的螺纹与位移块8内壁的螺纹相互匹配,位移块8受到滑行杆3限位,所以位移块8沿着平移螺纹柱4发生滑动,位移块8滑行的过程中带动机械手9进行同步运动。
26.本技术实施例在使用时:工作人员将待对位贴合的物品放置在放置槽67上,伺服电机7通电后启动,伺服电机7带动升降螺纹柱62转动,升降螺纹柱62以自身的中心线为分界线开设两个方向相反的螺纹,两个滑行块63内壁的螺纹与升降螺纹柱62表面的螺纹相互匹配,两个滑行块63受到角度杆66的限位,所以两个滑行块63沿着升降螺纹柱62发生滑动,两个滑行块63滑动的过程中与固定座65之间的距离发生改变,滑行块63与固定座65支架的角度杆66发生角度偏转,角度杆66从固定座65的底端向上推动,固定座65带动放置台64进行同步运动,放置台64进行升降运动,ccd相机11通电后启动,ccd相机11自动扫描,获得带贴合的物品较为完整的数字图像和位置信息,并且进行了储存、传输、处理等一系列过程,马达5通电后启动,马达5带动平移螺纹柱4转动,平移螺纹柱4表面的螺纹与位移块8内壁的螺纹相互匹配,位移块8受到滑行杆3限位,所以位移块8沿着平移螺纹柱4发生滑动,位移块8滑行的过程中带动机械手9进行同步运动,对机械手9的位置进行调节,夹持气缸92上电磁阀打开,往夹持气缸92内输入压缩空气,推动活塞在夹持气缸92筒内做往复运动,夹持气缸92进行伸缩运动,夹持气缸92从一侧带动推动块96进行滑动,推动块96滑动的过程中带动扭矩杆95进行同步运动,扭矩杆95另一端安装在活动块97上,活动块97沿着活动槽98内发生滑动,活动块97滑动的过程中带动两个夹爪94进行相对运动,两个夹爪94分别从物体的
两侧进行夹持,夹持的物体与放置槽67内的物体进行对位贴合,使用一段时间后,气泵23通电后启动,气泵23通过抽取管道22抽取外环境中的气体,抽取到的气体通过输送软管24输送至喷气板25内,喷气板25将气体均匀喷出,对ccd相机11表面粘附的杂质进行清理,角度气缸27上电磁阀打开,往角度气缸27内输入压缩空气,推动活塞在角度气缸27筒内做往复运动,角度气缸27进行伸缩运动,角度气缸27从一侧推动安装板26,安装板26沿着方向座29发生角度偏转,安装板26偏转时带动喷气板25进行同步运动,对喷气板25的喷气角度进行调节。
27.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。