1.本实用新型涉及自动化机械生产技术领域,特别是涉及一种冲床内置二轴机械手。
背景技术:
2.冲床是一台冲压式压力机,冲压工艺由于比传统机械加工来说有节约材料和能源,效率高,对操作者技术要求不高及通过各种模具应用可以做出机械加工所无法达到的产品这些优点,因而它的用途越来越广泛。
3.根据现有技术观察,在使用冲床进行生产过程中大多数都是需要加工的原料放置在冲床的加工区,等待加工完毕后在有工作人员取出,由于冲床加工区域属于危险区域,采用人工拿去的方式十分危险,同时人工拿去效率低下,后续还需要进行运送,这样就会影响了的加工效率,从而会影响整体的加工效率。
技术实现要素:
4.本实用新型所要解决的技术问题是提高生产加工效率,保证生产加工的安全。
5.为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种冲床内置二轴机械手,包括冲床,所述冲床中部位置固定连接有二轴机械手结构,所述二轴机械手结构包括二轴传动结构,所述冲床远离二轴机械手结构任意一侧固定连接有传输带结构;
6.所述二轴传动结构包括第一伺服电机,所述第一伺服电机驱动端固定连接有伺服电机斜齿轮,所述伺服电机斜齿轮侧面啮合连接有丝杆斜齿轮,所述丝杆斜齿轮远离第一伺服电机一侧中心位置固定连接丝杆,所述丝杆两端均转动连接有丝杆固定座,所述丝杆中部位置设置有丝杆传动连接座,所述丝杆传动连接座远离丝杆一端对称固定连接有滑台,两个所述滑台远离丝杆传动连接座一端固定连接有机械手抬升结构,二轴机械手结构由二轴传动结构、固定在外壳上的抬升滑轨、机械手抬升结构和机械手结构构成;机械手结构安装于机械手抬升结构上,机械手抬升结构22通过滑台安装在抬升滑轨上,通过二轴传动结构设有的两个伺服电机控制机械手结构升降和左右平移,实现机械手结构靠近、吸持和传输工件,二轴机械手结构、二轴传动结构、机械手抬升结构、机械手结构、传输带结构和承台构成,二轴机械手结构安装于冲床内部且二轴机械手结构设有的机械手结构位于冲压工作区域后面,实现本实用新型对工件的抓取与传输功能,承台安装于冲床另一侧且承台顶部支撑安装有传输带结构,所述传输带结构左侧靠近机械手结构,使工件可通过传输带结构传输至机械手结构下方,实现机械手结构吸持工件和传输工件。
7.优选的,所述机械手抬升结构包括第二伺服电机,所述第二伺服电机驱动端固定连接有行星减速机,所述行星减速机远离第二伺服电机一端固定连接有传动齿轮,所述传动齿轮下方位置啮合连接有传动齿条,所述传动齿条远离传动齿轮一端开设有滑轨,所述滑轨内滑动连接有固定滑台,所述固定滑台远离传动齿轮一端固定连接有机械手结构,所述机械手结构远离传动齿轮一侧固定连接有连接板,所述机械手结构远离连接板一端滑动
连接有l型机械臂,真空吸盘可以帮助l型机械臂对零件进行固定拿取,使用行星减速机的优点是保证精密传动、降低转速和增大扭矩。
8.优选的,所述传输带结构包括承台,所述承台远离冲床一端对称固定连接有传输带机壳,两个传输带机壳相对一侧靠近冲床一端依次转动连接有三个滚筒结构,两个所述传输带机壳任意一个内壁固定连接有伺服驱动器,所述伺服驱动器驱动端通过小齿轮啮合连接有齿条,所述齿条远离伺服驱动器一端分别啮合连接有同步带轮,所述承台顶部上表面靠近冲床一侧固定连接有金属接近开关,所述承台顶部上表面远离金属接近开关一端对称固定连接有l型块,两个所述l型块相对一侧靠近金属接近开关一端贯穿滑动连接有挡块,传输带结构左侧设有金属接近开关,金属接近开关可检测机械手结构的位置,实现检测机械手结构的位置并向后端发送电信号;传输带两侧机架上安装有四个推板固定座,推夹板安装于推板固定座内,通过外部设备或手动控制推夹板的伸缩,限制传输带的传输工作区域,使工件呈直线运输,实现本实用新型传输不同规格的工件。
9.优选的,所述机械手抬升结构远离第二伺服电机一侧固定连接有齿轮保护壳,两个所述滑台靠近第二伺服电机一侧滑动连接有抬升滑轨,两个所述抬升滑轨远离滑台一端与二轴传动结构固定连接,所述机械手抬升结构远离滑台一侧对称位置分别固定连接有右槽型光电开关和左槽型光电开关,齿轮保护壳可以保护传动齿轮,防止在冲压过程中产生的碎屑进入传动齿轮和齿条内,造成零件磨损。
10.优选的,所述冲床远离传输带结构一端固定连接有plc控制电箱,所述plc控制电箱任意一侧侧壁顶部位置设置有触摸屏,plc控制电箱上设有触摸屏,实现本实用新型的启停控制和数据显示功能。
11.优选的,两个所述传输带机壳任意一个远离伺服驱动器一侧中部位置固定连接有配电箱,所述配电箱远离伺服驱动器一侧设置传输带电源开关,通过开启或关闭配电箱上设有的传输带电源开关,实现传输带结构的启停控制。
12.优选的,三个所述滚筒结构两端均贯穿固定连接有同步带轮,三个所述滚筒结构两端远离同步带轮一端贯穿固定连接有深沟球轴承,六个所述深沟球轴承与传输带机壳固定连接,滚筒结构由同步带轮和深沟球轴承构成,其优点是更精确的进行机械传动和减少元件磨损。
13.优选的,三个所述同步带轮表面设置有传送带,两个所述传输带机壳远离承台一端依次固定连接有两个推板固定座,四个推板固定座远离传输带机壳一侧滑动连接有夹板,夹板是为了对运送的零件新型限位,使其能够准确的进行运输。
14.优选的,所述传动齿条两端分别固定连接有左感应片和右感应片,所述l型机械臂远离连接板一端底部位置固定连接有真空吸盘,靠近金属接近开关一侧设有l型块,所述l型块开设有槽,挡块安装于l型块开设有的槽中,使工件不会因惯性力而产生位置偏离,实现机械手结构精确吸取工件。
15.本实用新型的有益效果如下:
16.本实用新型通过在一种冲床内置二轴机械手设置了二轴传动结构和传输带结构形成了传输机构,此机构可以将冲压好的零件进行运输,通过机械手抬升结构进行拿去移动,随后通过传输带结构上的传输带进行传送,减少了人工操作的步骤,增加了生产加工的效率,从而加快了整体生产节奏,同时保证了生产加工时的安全保障。
附图说明
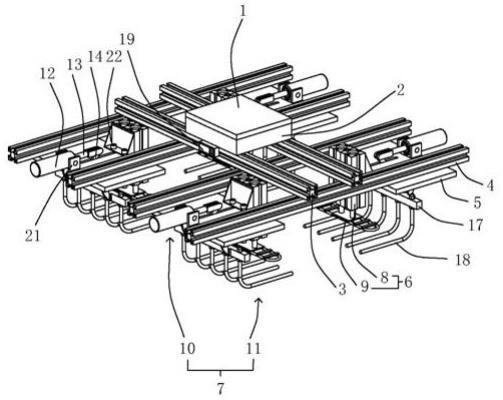
17.图1为本实用新型的一种冲床内置二轴机械手的正面立体结构示意图;
18.图2为本实用新型的一种冲床内置二轴机械手的反面立体结构示意图;
19.图3为本实用新型的一种冲床内置二轴机械手的传输带结构示意图;
20.图4为本实用新型的一种冲床内置二轴机械手的传输带内部结构示意图;
21.图5为本实用新型的一种冲床内置二轴机械手的滚筒传动结构示意图;
22.图6为本实用新型的一种冲床内置二轴机械手的正面结构示意图;
23.图7为本实用新型的一种冲床内置二轴机械手的内部构造示意图;
24.图8为本实用新型的一种冲床内置二轴机械手的横向平移结构示意图;
25.图9为本实用新型的一种冲床内置二轴机械手的机械手抓取结构示意图。
26.图中:1、冲床;10、plc控制电箱;11、触摸屏;2、二轴机械手结构;20、二轴传动结构;200、第一伺服电机;201、伺服电机斜齿轮;202、丝杆斜齿轮;203、丝杆固定座;204、丝杆传动连接座;205、丝杆;206、第二伺服电机;207、行星减速机;21、抬升滑轨;22、机械手抬升结构;220、滑台;221、右槽型光电开关;222、左槽型光电开关;223、齿轮保护壳;224、传动齿轮;23、机械手结构;230、左感应片;231、传动齿条;232、滑轨;233、固定滑台;234、右感应片;235、连接板;236、l型机械臂;237、真空吸盘;30、传输带结构;300、金属接近开关;301、挡块;302、l型块;303、夹板;304、推板固定座;305、传输带电源开关;306、配电箱;307、齿条;308、伺服驱动器;309、传输带机壳;310、滚筒结构;311、同步带轮;312、深沟球轴承;32、传输带;4、承台。
具体实施方式
27.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
28.请参阅图1和图2,一种冲床内置二轴机械手,包括冲床1,冲床1中部位置固定连接有二轴机械手结构2,二轴机械手结构2包括二轴传动结构20,冲床1远离二轴机械手结构2任意一侧固定连接有传输带结构30,冲床1远离传输带结构30一端固定连接有plc控制电箱10,plc控制电箱10任意一侧侧壁顶部位置设置有触摸屏11。
29.如图3、图4和图5示,传输带结构30包括承台4,承台4远离冲床1一端对称固定连接有传输带机壳309,两个传输带机壳309相对一侧靠近冲床1一端依次转动连接有三个滚筒结构310,两个传输带机壳309任意一个内壁固定连接有伺服驱动器308,伺服驱动器308驱动端通过小齿轮啮合连接有齿条307,齿条307远离伺服驱动器308一端分别啮合连接有同步带轮311,承台4顶部上表面靠近冲床1一侧固定连接有金属接近开关300,承台4顶部上表面远离金属接近开关300一端对称固定连接有l型块302,两个l型块302相对一侧靠近金属接近开关300一端贯穿滑动连接有挡块301,三个同步带轮311表面设置有传送带32;
30.两个传输带机壳309远离承台4一端依次固定连接有两个推板固定座304,四个推板固定座304远离传输带机壳309一侧滑动连接有夹板303,三个滚筒结构310两端均贯穿固定连接有同步带轮311,三个滚筒结构310两端远离同步带轮311一端贯穿固定连接有深沟球轴承312,六个深沟球轴承312与传输带机壳309固定连接,两个传输带机壳309任意一个
远离伺服驱动器308一侧中部位置固定连接有配电箱306,配电箱306远离伺服驱动器308一侧设置传输带电源开关305。
31.如图6、图7、图8和图9示,二轴传动结构20包括第一伺服电机200,第一伺服电机200驱动端固定连接有伺服电机斜齿轮201,伺服电机斜齿轮201侧面啮合连接有丝杆斜齿轮202,丝杆斜齿轮202远离第一伺服电机200一侧中心位置固定连接丝杆205,丝杆205两端均转动连接有丝杆固定座203,丝杆205中部位置设置有丝杆传动连接座204,丝杆传动连接座204远离丝杆205一端对称固定连接有滑台220,两个滑台220远离丝杆传动连接座204一端固定连接有机械手抬升结构22;
32.机械手抬升结构22包括第二伺服电机206,第二伺服电机206驱动端固定连接有行星减速机207,行星减速机207远离第二伺服电机206一端固定连接有传动齿轮224,传动齿轮224下方位置啮合连接有传动齿条231,传动齿条231两端分别固定连接有左感应片230和右感应片234,传动齿条231远离传动齿轮224一端开设有滑轨232,滑轨232内滑动连接有固定滑台233,固定滑台233远离传动齿轮224一端固定连接有机械手结构23,机械手结构23远离传动齿轮224一侧固定连接有连接板235,机械手结构23远离连接板235一端滑动连接有l型机械臂236,l型机械臂236远离连接板235一端底部位置固定连接有真空吸盘237;
33.机械手抬升结构22远离第二伺服电机206一侧固定连接有齿轮保护壳223,两个滑台220靠近第二伺服电机206一侧滑动连接有抬升滑轨21,两个抬升滑轨21远离滑台220一端与二轴传动结构20固定连接,机械手抬升结构22远离滑台220一侧对称位置分别固定连接有右槽型光电开关221和左槽型光电开关222。
34.本实用新型在使用时,当冲床1加工好零件后,第一伺服电机200控制伺服电机斜齿轮201进行转动,伺服电机斜齿轮201通过丝杆斜齿轮202带动丝杆205进行转动,从而带动丝杆205的零件进行运行,控制机械手抬升结构22进行运行,当传动齿轮224旋转,使机械手结构23伸缩至最远距离时,传动齿条231两端设有的左感应片230或右感应片234插入右槽型光电开关221或左槽型光电开关222的感应凹槽内,使右槽型光电开关221和左槽型光电开关222发出电信号至终端,终端plc控制第二伺服电机206,实现程序控制传动齿条231的传输距离和步进工序,当下降至真空吸盘237吸取到加工好的零件时,第二伺服电机206通过行星减速机207带动传动齿轮224进行转动,传动齿轮224通过传动齿条231将l型机械臂236运送至金属接近开关300的位置,当金属接近开关300检测机械手结构23的位置,控制伺服驱动器308传输工件至挡块301处,随后通过夹板303对加工好的零件进行限位,最后通过传输带32将加工好的零件运送出去,进而完成整个传输工作。
35.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。