1.本实用新型涉及厨余垃圾分类技术领域。
背景技术:
2.可持续发展战略作为我国的基本发展战略,目的是为了让中华儿女和子孙后代享受充分的资源和良好的资源环境,建立生态可持续能力变得尤为重要,厨余垃圾本身作为一种垃圾,参与处理和再利用后,可再变成人类可利用的资源,符合我国可持续发展的战略,那么厨余垃圾的有效处理则成为重中之重。
3.厨余垃圾的末端处理不允许有塑料垃圾袋的掺杂,会大大影响处理效率,目前使用的分类垃圾柜中都会安装有垃圾破袋机构,使得厨余垃圾桶中只有厨余垃圾,而垃圾袋则被放置在其它垃圾桶中。
4.但一般的垃圾塑料袋破袋结构,使用刀具械类工具暴力破坏垃圾袋的大部分,破袋并不完整,容易造成大量垃圾残留在垃圾袋中等缺陷,而且机构与垃圾直接接触,不仅使机构容易沾染垃圾,造成机构故障率高,需要长期维护,而且面临着容易使居民受伤的风险。
技术实现要素:
5.为了解决上述问题,本实用新型提出一种双轴式厨余垃圾塑料袋回收机构。
6.本实用新型的目的是通过以下技术方案实现的:
7.一种双轴式厨余垃圾塑料袋回收机构,其特征在于,包括:托盘、机械夹板机构、第一级动作机构、第二级动作机构;
8.所述机械夹板机构安装于托盘上,具有分合功能用于夹持垃圾塑料袋;
9.所述第二级动作机构,用于驱动切换托盘翻转,更换姿态;
10.所述第一级动作机构,用于驱动第二级动作机构携带托盘、机械夹板机构翻转和切换,更换处于不同空间位置。
11.与现有技术相比,本实用新型具有如下有益效果:
12.本实用新型彻底颠覆了传统暴力破袋的工作方式,无需对垃圾袋进行破坏,垃圾投掷后,经过本技术机构,将装好垃圾的垃圾袋做到袋与垃圾分别投放的效果。
附图说明
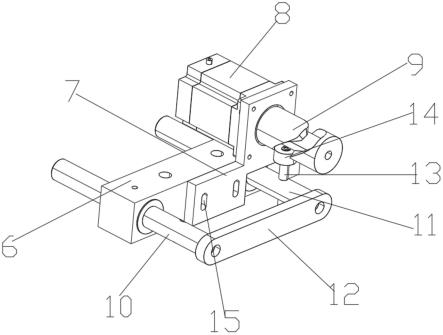
13.图1为本实用新型实施例1厨余垃圾塑料袋回收机构结构示意图-俯视图;
14.图2为本实用新型厨余垃圾塑料袋回收机构结构示意图-正视图;
15.图3为本实用新型中机械夹板机构结构示意图-夹板分开状态;
16.图4为本实用新型中机械夹板机构结构示意图-夹板闭合状态;
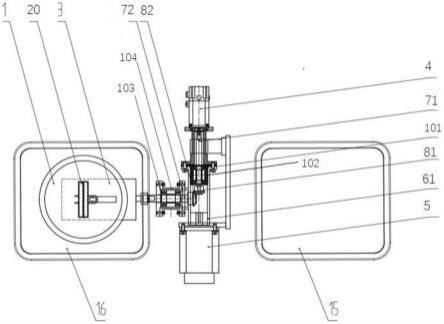
17.图5为图1中旋转机构开解两部分示意图一。
18.图6为图1中旋转机构开解两部分示意图二。
19.图7为本实用新型待机状态的场景结构示意图(图中托盘中的垃圾袋未画出,实际垃圾袋底部置于托盘中央处的机械夹板上);
20.图8为本实用新型投送垃圾状态及夹板闭合状态的场景结构示意图(图中垃圾袋未画出,实际垃圾袋底部由托盘中央处的机械夹板夹紧,同时垃圾内容物掉落厨余垃圾桶16内);
21.图9为本实用新型投送垃圾袋状态的场景结构示意图(图中垃圾袋未画出,实际垃圾袋底部在托盘中央处的机械夹板夹紧改为松开,垃圾袋掉落其他垃圾桶15内);
22.图10为本实用新型回复起始位置场景结构示意图(可以加设空垃圾袋,置于托盘中央处);
23.附图标记:
24.1-托盘,3-托盘固定基座,
25.机械手机构(未加数字标记):20-机械夹板,21-主动齿,22-从动齿,23
‑ꢀ
销,24-节点,25-电子推杆装置,251-缸体,252-伸出杆;
26.4-第一电机,71-主动动力轴,81-主动锥齿轮,82-被动锥齿轮,72-被动动力轴,
27.第二电机5,动力臂装置(未加数字标记):圆柱转轴61,法兰机构62;
28.基座体系:第一轴承101,第一基座102,第二轴承103,第二基座104,第三轴承105,第三基座106;
29.支架体系:支架107;
30.其他垃圾桶15,厨余垃圾桶16;
31.垃圾柜柜体17,垃圾柜投掷口171。
具体实施方式
32.以下结合附图和实施例对本实用新型作进一步描述,但本实施例并不用于限制本实用新型,凡是采用本实用新型的相似结构及其相似变化,均应列入本实用新型的保护范围。
33.如图1-图10所示,以下结合附图和实施例对本实用新型作进一步描述。
34.一种双轴式厨余垃圾塑料袋回收机构,其特征在于,包括:托盘1、机械夹板机构、第一级动作机构、第二级动作机构;
35.所述机械夹板机构安装于托盘1上,具有分合功能用于夹持垃圾塑料袋;
36.所述第二级动作机构,用于驱动切换托盘1翻转,更换姿态;
37.所述第一级动作机构,用于驱动第二级动作机构携带托盘1、机械夹板机构翻转和切换,更换处于不同空间位置。
38.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,进一步的,所述托盘1 中央位置设有安装孔,所述机械夹板机构通过安装孔设置于托盘1中央位置。其特征在于,所述托盘1改由平板或者平盘取代。本实施例附图示意了托盘这种实例。
39.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,进一步的,所述托盘 1、机械夹板机构,在托盘底部设有托盘固定基座3:
40.所述托盘1、机械夹板机构都固定于固定基座3上。
41.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,进一步的,所述托盘设有安
装孔(图中未示意出);
42.所述机械夹手机构包括两块机械夹板20、主动齿21、从动齿22、两个销23、动力装置;所述两块机械夹板20穿过安装孔位于托盘1内,两者开合配合;所述主动齿21和从动齿22顶端分别与两块机械夹板20固定,主动齿21和从动齿 22啮合,并分别限位于各自销23转动,形成啮合传动端;所述主动齿21还设有施动端,在动力装置作用下所述施动端接受推力的施加/复位,从而调控托盘1 内两块机械夹板20的开合状态;设置推杆装置连接于施动端。
43.其中,通过机械夹板机构将垃圾袋内夹紧在托盘上的实现方式众多,均在本实用新型的保护范围之内。
44.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,进一步的,所述动力装置选择推杆装置。
45.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,进一步的,推杆装置安装于所述托盘固定基座3水平方向末端。
46.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,进一步的,所述推杆装置选择电子推杆装置25;
47.所述电子推杆装置25包括缸体251和伸出杆252,伸缩杆252与主动齿21 施动端形成活动节点24,伸出杆252在缸体251内伸缩进而带动主动齿21转动,在齿轮的啮合传动下带动从动齿22转动,实现两块机械夹板20的分开与闭合;
48.两个销23、缸体251安装固定于托盘固定基座3。
49.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,所述机械夹板机构包括两块机械夹板20、主动齿21、从动齿22、两个销23、动力装置;
50.所述两块机械夹板20位于托盘1内,两者开合配合;
51.所述主动齿21和从动齿22顶端分别与两块机械夹板20固定,主动齿21 和从动齿22啮合,并分别限位于各自销23转动,形成啮合传动端;
52.所述主动齿21还设有施动端,在动力装置作用下所述施动端接受推力的施加/复位,从而调控托盘1内两块机械夹板20的开合状态。
53.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,所述动力装置为推杆装置,连接于施动端。
54.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,选择电子推杆装置 25;
55.所述电子推杆装置25包括缸体251和伸出杆252,伸缩杆252与主动齿21 施动端形成活动节点24,伸出杆252在缸体251内伸缩进而带动主动齿21转动,在齿轮的啮合传动下带动从动齿22转动,实现两块机械夹板20的分开与闭合。采用的所述电子推杆装置25包括缸体251和伸出杆252,这部分为业内常规设备。
56.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,所述机械夹板机构通过推杆装置和主动传动齿的动作实现对垃圾袋的夹紧与释放动作。
57.进一步的,所述第一级动作机构、第二级动作机构:
58.所述第二级动作机构整体固定于第一级动作机构上;
59.所述第一级动作机构包括第二电机5、动力臂装置,所述动力臂装置由第二电机5驱动;
60.作为实施例,所述第二级动作机构包括第一电机4、主动力轴71,所述主动力轴71由第一电机4驱动,所述主动力轴71另一端固定于所述托盘固定基座3;如此,所述主动力轴71在第一电机4的驱动下,带动托盘1一起旋转以改变托盘1姿态;(因常规结构,未提供示意图);
61.或者,作为另一实施例,所述第二级动作机构包括第一电机4、主动力轴71、主动锥齿轮81,被动锥齿轮82、被动动力轴72;其中:所述主动力轴71由第一电机4驱动,主动锥齿轮81动力输入端连接主动力轴71动力输出端连接,所述主动锥齿轮81和被动锥齿轮82相互啮合,被动锥齿轮82动力输出端与被动动力轴72 输入端连接,所述被动动力轴72另一端固定于所述托盘固定基座(3);如此,所述主动力轴71在第一电机4的驱动下,通过主动锥齿轮81和被动锥齿轮82的啮合,将动力传送到被动动力轴72,被动动力轴72带动托盘1一起旋转以改变托盘1姿态; (图5、图6所示,该实施例方案有利于在空间利用上体现创造性设计,如此,使得第一电机4在空间上与第一级动作机构放在同一维度,设置叠合,使产品设计的集成效果发挥极致)。
62.进一步的,在第一级动作机构中,如图5、图6的右侧部分,所述动力臂装置:
63.包括圆柱转轴61、法兰机构6;所述圆柱转轴61侧向连接第二级动作机构,使得第一级动作机构同步于圆柱转轴61旋转;所述法兰机构6视为安装基座,用于安装第三轴承105、第三基座106以支持圆柱转轴61旋转,同时用于给第二级动作机构的第一电机4提供安装位。
64.进一步的,如图1以及图5、图6的右侧部分,作为最优实施例,借用法兰机构62,使得第二级动作机构中的第一电机4、主动力轴71,以及第一级动作机构中的第二电机5、动力臂装置,四者在轴向重合,所述主动力轴71与动力臂装置上下叠合,形成旋转轴区;所述第一电机4、第二电机5分别设置于旋转轴区的两端位置,对峙布置,最大可能得集成空间。
65.进一步的,还包括基座体系;
66.所述基座体系如图5、图6所示,包括:第二轴承(103)、第二基座(104)、第三轴承(105)、第三基座(106),所述第二轴承(103)设置于第二基座(104) 内并与被动动力轴72连接;所述第三轴承105设置于第三基座106内并与圆柱转轴 61连接;
67.进一步的,如图1所示,所述基座体系还包括第一轴承101、第一基座102,所述第一轴承101置于第一基座102内用于连接主动力轴71。
68.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,进一步的,还包括支架体系,用于承重和安装动力臂装置,接受本实用新型整体机构的荷载。其特征在于,所述支架体系包括法兰机构62和支架107;
69.所述法兰机构62用于给第二级动作机构的第一电机4提供安装位,同时为第三轴承105、第三基座106提供安装位;
70.如图1以及图5、图6的右侧部分,所述支架107在侧向同时承接法兰机构62 和第二电机5,通过支架105将承重传递外部结构。作为实施例,如图7-图10所示,承重传递给垃圾柜柜体17或者外部墙体上,举例而非限定。
71.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,本技术整体设计以及所述第一级动作机构、第二级动作机构,各部件之间的固结,均可采用螺栓连接,方便拆装。这是体现创新和优越地方。
72.所述的双轴式厨余垃圾塑料袋回收机构,其特征在于,用于支持的工作状态:
73.托盘1朝上,夹持塑料袋,适用于初始状态时,如图7;
74.投放垃圾时托盘在机械夹板机构和动力装置带动下分别执行四个动作,第一步,两块机械夹板20闭合,被动动力轴72带动托盘在水平方向旋转180度,使托盘面朝向厨余垃圾桶,投放厨余垃圾,如图8;
75.被动动力轴72带动托盘在水平方向反向旋转180度,使托盘复位,正面朝上;第一级动作机构带动托盘进行垂直方向顺时针方向旋转180度,使托盘正面朝下,面对其他垃圾桶,两块机械夹板20分开,投放垃圾袋;如图9;
76.第一级动作机构回转,带动托盘进行垂直方向逆时针方向旋转180度,使托盘恢复初始的朝上状态,如图10。
77.任一所述双轴式厨余垃圾塑料袋回收机构的应用场景,其特征在于,本实用新型机构安置应用于垃圾柜柜体17,安装于厨余垃圾桶16和其它垃圾桶15之间,并位于厨余垃圾桶16和其它垃圾桶15之上,使用者将垃圾通过垃圾柜投掷口171 投入本实用新型机构的托盘1位置,托盘1内预备有垃圾袋。制图中,垃圾袋未画出,垃圾袋底部可以由机械夹板机构夹住。本实用新型通过动动力装置与机械夹板机构之间工作的配合,达到物袋分离,分别投放的效果。
78.应用场景例:
79.如图7-图10:将本实用新型产品应用设置在垃圾柜柜体17内,本实用新型产品安装于垃圾箱受力框架上,或者墙体上。
80.本技术创新在于结构设计本身,本技术保护的是构造技术方案。应用时,基于本技术的构造产品,用于支持上述功能描述和场景描述的电控部分,不是本技术的发明任务。
81.上述描述仅是对本实用新型较佳实施例的描述,并非是对本实用新型范围的任何限定。任何熟悉该领域的普通技术人员根据上述揭示的技术内容做出的任何变更或修饰均应当视为等同的有效实施例,均属于本实用新型技术方案保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。