1.本发明属于生物与新医药技术领域,并涉及医疗仪器、设备与医学专用软件领域,尤其涉及新型治疗、急救与康复技术中的急救及康复的新型装置与技术领域,具体涉及一种多自由度智能穿刺系统。
背景技术:
2.穿刺,是将穿刺针刺入体腔抽取分泌物做化验,或向体腔注入气体或造影剂做造影检查,或向体腔内注入药物的一种诊疗技术。穿刺的目的是抽血化验,输血、输液及置入导管做血管造影等。现有穿刺方法极其考验穿刺人员的经验和手感等主观因素,需要根据不同的穿刺部位调整不同的穿刺手法及力度,而随着居民医疗意识的提升,疾病早发现的概率越来越多,使得越来越多人员需要进行进一步穿刺进行病变筛查,而穿刺的经验和手感需要长时间培养和训练,这导致了实际穿刺人员的严重不足,使得需要穿刺的病患等待较长的时间,严重影响病患的确诊效率,极易引发不必要的争端。
技术实现要素:
3.为了解决对患者进行穿刺时引发的一系列问题,提供一种能够进行智能化、自动化穿刺及智能化穿刺训练的多自由度智能穿刺系统。
4.基于上述目的,本发明通过如下技术方案实现:一种多自由度智能穿刺系统,包括智能穿刺机构,智能穿刺机构连接有多自由度调节机构,智能穿刺机构还连接有与智能穿刺机构、多自由度调节机构相配合的智能控制机构;智能控制机构包括智能控制处理器,智能控制处理器连接有数据分析模块、数据存储模块、模式调控模块、动态演示模块及数据传输模块。
5.优选地,智能控制机构还包括远程显示壳体,远程显示壳体上设有与数据传输模块电性连接的显示触摸屏,显示触摸屏的一侧设有与数据传输模块电性连接的显示副屏;远程显示壳体背面设有壳体支撑结构,壳体支撑结构底端设有壳体支撑底座,壳体支撑底座底面上设有底座调节器;远程显示壳体底面上设有多个触控按钮。
6.优选地,多自由度调节机构包括多自由度机械臂,多自由度机械臂底端设有机械臂调节装置,机械臂调节装置包括支撑底座,支撑底座上设有调节转轴,调节转轴上设有与多自由度机械臂相连接的调节转盘,调节转盘底面上均布有环形调节齿轮,环形调节齿轮与设置在支撑底盘上的支撑调节齿轮相啮合,支撑底座上设有与支撑调节齿轮相配合的支撑调节电机;智能穿刺机构包括设置在多自由度机械臂端部的穿刺支架,穿刺支架上设有穿刺调节盘,穿刺调节盘上设有穿刺手术结构;多自由度机械、支撑调节电机均与智能控制处理器电性连接。
7.优选地,穿刺手术结构包括至少两个相互配合的穿刺手术筒,穿刺手术筒一端均设有与穿刺调节盘相配合的穿刺手术轴,穿刺手术轴远离穿刺手术筒的一端套设有手术调节轴承,手术调节轴承上套设有穿刺同步凹轮,穿刺同步凹轮远离穿刺手术筒的一侧侧面
上均布有手术锥形轮齿,手术锥形轮齿与设置在穿刺手术轴端部的手术调节电机相配合;穿刺调节盘的中心设有与穿刺支架间隙配合的穿刺固定孔,穿刺固定孔与多个设置在穿刺调节盘上相对穿刺调节盘中心对称的穿刺调节滑槽相连接,穿刺调节滑槽与穿刺支架间隙配合;穿刺同步凹轮均与设置在穿刺调节滑槽内的滑槽同步轮齿相啮合;穿刺手术筒内设有穿刺手术针,穿刺手术针上设有穿刺调节器;穿刺手术针上设有与智能控制处理器电性连接的微型穿刺摄像头、微型压力传感器;穿刺手术筒内设有与穿刺手术针相配合的穿刺训练器,穿刺训练器包括套设在穿刺手术针上的穿刺训练套环,穿刺训练套环上设有多个间隙配合的穿刺训练凸齿,穿刺训练凸齿与设置在穿刺手术筒内的穿刺训练电机相配合。
8.优选地,穿刺调节盘上设有与穿刺固定孔相配合的穿刺固定器,穿刺固定器包括穿刺固定套筒,穿刺固定套筒与套设在穿刺固定孔内的穿刺调节套筒相连接,穿刺调节套筒上套设有穿刺调节转动槽,穿刺调节转动槽与套设在穿刺固定孔内的穿刺调节凸环相配合;穿刺固定套筒上设有套筒齿轮,套筒齿轮与设置在穿刺调节盘上的穿刺固定电机相配合;穿刺固定套筒上设有与穿刺同步凹轮间隙配合的套筒开口,套筒开口与设置在穿刺调节套筒侧面上的调节开口相连通;穿刺调节盘上设有与套筒开口相配合的套筒滑块,套筒滑块与设置在穿刺调节盘上的滑块调节推杆相连接,套筒滑块底面设有滑块导向轮,滑块导向轮与设置在穿刺调节盘上的滑块滑槽相配合;穿刺调节转动槽内套设有穿刺调节套环,穿刺调节套环内均布有与穿刺同步凹轮相配合的调节滑槽轮齿,穿刺调节套环上设有与穿刺同步凹轮间隙配合的套环开口;穿刺训练器还包括套设在穿刺手术针上的穿刺训练环,穿刺训练环通过一对穿刺训练连杆与设置在穿刺手术筒内连杆套筒相连接,连杆套筒内设有与穿刺训练连杆相连接的套筒弹簧,连杆套筒内设有与穿刺训练连杆相配合的训练压力传感器,训练压力传感器与智能控制处理器电性连接。
9.优选地,穿刺手术筒远离穿刺调节盘的一端均设有穿刺手术凹盘,穿刺手术凹盘的上设有多个与穿刺手术筒相连接的穿刺电动推杆,穿刺手术凹盘内设有多个间隙配合的穿刺调节推杆,穿刺调节推杆的活动端均设有穿刺真空吸盘;穿刺手术筒内设有与穿刺手术针相配合的穿刺稳定器;穿刺手术凹盘上设有与与穿刺手术针相配合的穿刺手术孔;手术调节电机、滑块调节推杆、穿刺电动推杆、穿刺调节推杆、穿刺真空吸盘均与智能控制处理器电性连接;穿刺手术凹盘内设有多个与智能控制处理器电性连接的微型摄像机,微型摄像机上套设有环形照明灯。
10.优选地,穿刺调节器包括设置在穿刺手术针尾端的穿刺调节杆,穿刺调节杆上设有穿刺调节槽,穿刺调节槽内设有一对通过穿刺同步带相连接的穿刺同步轮,穿刺同步轮间设有穿刺调整间隙;穿刺同步带外表面上均布有同步带同步轮齿,同步带同步轮齿与均布在穿刺调节槽上的调节槽轮齿相啮合;穿刺手术筒内设有与穿刺调节杆相垂直的穿刺驱动杆,穿刺驱动杆上设有与穿刺同步带内表面相配合的驱动同步轮,驱动同步轮通过驱动轮轴承与穿刺驱动杆转动连接,驱动同步轮设置在穿刺调整间隙内与穿刺同步轮间隙配合;穿刺驱动杆上设有与驱动同步轮相配合的穿刺调节电机;穿刺手术筒内设有穿刺导向连杆,穿刺导向连杆上设有与穿刺调节杆相配合的穿刺导向孔。
11.优选地,穿刺驱动杆上设有一对间隙配合的穿刺调节轴承,穿刺调节轴承分别设置在穿刺调节杆两侧,穿刺调节轴承上设有穿刺调节板,穿刺调节板上均设有间隙配合的穿刺调节滚轴,穿刺调节滚轴分别与设置在穿刺同步轮侧面上的同步轮凹环相配合;穿刺
调节电机与智能控制处理器电性连接。
12.优选地,穿刺稳定器包括套设在穿刺手术针上的穿刺稳定套筒,穿刺稳定套筒包括至少两个相配合的扇环型稳定板,扇环型稳定板均通过电动稳定推杆与穿刺手术筒相连接,扇环型稳定板的两侧均扇环型凸板,扇环型凸板一侧设有与扇环型凸板相配合的扇环型凹槽,扇环型凹槽与设置相邻扇环型稳定板上的扇环型凸板相配合;扇环型凸板与设置在相邻扇环型稳定板上的扇环型凹槽相配合。
13.优选地,穿刺手术针上套设有与穿刺手术孔相配合的穿刺直线轴承,穿刺直线轴承靠近穿刺手术凹盘的一侧设有穿刺手术轴承,穿刺手术轴承上套设有圆台型调节筒,圆台型调节筒的端部设有与穿刺手术孔螺纹连接的调节手术筒,调节手术筒远离圆台型调节筒的一端设有防脱挡杆;调节手术筒上套设有手术电机轴承,手术电机轴承上设有穿刺手术电机,穿刺手术电机与设置在调节手术筒上的穿刺手术齿轮相配合;防脱挡杆上设有与穿刺手术凹盘相配合的挡环电磁铁,挡环电磁铁与设置在穿刺手术凹盘上的凹盘电磁铁相配合;扇环型稳定板上敷设有防护垫层;穿刺手术筒内设有分别与电动稳定推杆相连接的支撑连杆;电动稳定推杆、穿刺手术电机、挡环电磁铁与智能控制处理器电性连接。
14.与现有技术相比,本发明的有益效果如下:(1)本发明通过多自由度调节机构对智能穿刺机构进行多自由度调节和控制,通过智能控制机构对多自由度调节机构和智能穿刺机构进行智能控制及远程调节;智能控制处理器对各个元器件进行智能化控制及处理,方便使用本穿刺系统对患者进行穿刺手术时,能够根据患者需要穿刺的部位进行智能化穿刺动作;数据分析模块能够根据患者穿刺部位进行快速分析处理,方便本穿刺系统实现快速穿刺动作;数据存储模块能够储存不同的穿刺数据,方便根据不同的穿刺进程进行不同的穿刺手术动作;模式调控模块方便穿刺人员对穿刺模式等进行快速调控,方便实现对穿刺模式的快速调节;动态演示模块能够根据不同的穿刺模式来进行不同的动画模拟演示,方便穿刺人员等及时了解穿刺进程;数据传输模块的设置能够大幅度降低数据延迟,提升数据处理转化效率,降低数据丢失、延迟的可能性。
15.(2)远程显示壳体上的显示触摸屏能够对穿刺进程进行动画模拟演示,显示副屏的设置能够对穿刺过程中穿刺手术针的位置进行显示,方便穿刺人员观察;壳体支撑结构对远程显示壳体进行支撑或悬挂,方便将远程显示壳体固定在合适位置上,壳体支撑底座起到辅助支撑作用;底座调节器能够对壳体支撑底座进行调节;触控按钮的设置方便穿刺人员对显示触摸屏及显示副屏显示的图像等进行调节。
16.(3)多自由度机械臂能够实现多自由度的调节,机械臂调节装置的设置,能够对多自由度机械臂的位置进行旋转调节,增加多自由度机械臂的自由度量,支撑底座通过调节转轴与调节转盘连接,使得调节转盘能够沿调节转轴转动;环形调节齿轮的设置,方便支撑调节电机通过支撑调节齿轮带动环形调节齿轮转动,通过高精度齿轮的啮合,带动调节转盘上的多自由度机械臂进行位置转动,实现对多自由度机械臂的位置调整动作;穿刺支架与穿刺调节盘相配合,方便对穿刺手术结构进行调整。
17.(4)设置至少两个穿刺手术筒方便通过对穿刺手术筒的调整,实现对穿刺手术针的调整,方便根据不同患者的穿刺需求对穿刺手术筒进行调整,从而能够根据不同的穿刺方式选择合适的穿刺手术针;手术调节电机带动手术锥形齿轮转动,带动穿刺同步凹轮沿
手术调节轴承在穿刺手术轴上转动,穿刺同步凹轮与设置在穿刺调节滑槽内的滑槽同步轮齿相啮合,使穿刺同步凹轮能够在穿刺调节滑槽内移动,带动穿刺手术筒移动到穿刺固定孔内,实现了对穿刺手术筒调整的目的,方便穿刺人员根据不同患者的穿刺部位选择合适的穿刺手术筒。
18.(5)穿刺固定器的设置能够对进入穿刺固定孔内的穿刺手术筒进行固定,防止穿刺手术筒使用过程中发生晃动等问题;穿刺固定套筒与穿刺调节套筒配合,通过套筒开口与调节开口连接,方便穿刺同步凹轮带动穿刺手术轴进入穿刺固定套筒和穿刺调节套筒内,通过穿刺固定电机带动套筒齿轮旋转,带动穿刺固定套筒转动,使穿刺调节套筒沿穿刺固定孔旋转,穿刺调节转动槽沿穿刺调节凸环滑动,滑块调节推杆推动套筒滑块与套筒开口相结合,从而将穿刺手术筒稳定的固定在穿刺调节套筒内,实现对穿刺手术筒固定的目的。
19.(6)使用时,将穿刺手术凹盘覆盖在需要穿刺的初始位置上,通过穿刺电动推杆对穿刺手术凹盘的方向进行调节,使其贴付在穿刺初始位置上,利用穿刺调节推杆对穿刺真空吸盘进行调节,使穿刺真空吸盘吸附在患者皮肤上,对穿刺手术凹盘进行固定,方便对患者进行穿刺动作;穿刺手术孔便于穿刺手术针通过,方便对穿刺手术针进行定位。
20.(7)设置穿刺调节杆,能够对穿刺手术针进行调节,方便穿刺手术针对患者进行穿刺动作;穿刺调节槽配合穿刺同步带能够实现平稳地对穿刺调节杆调节的目的;间隙配合的穿刺同步轮带动穿刺同步带平稳移动,能够精确的控制穿刺同步带的转动,实现对穿刺调节杆的精确调节;同步带同步轮齿与调节槽轮齿啮合,使得穿刺同步带能够平稳、稳定地带动穿刺调节杆移动;穿刺驱动杆上的驱动同步轮能够驱动穿刺同步带运动,带动穿刺同步轮转动,进而实现对穿刺调节杆调节的目的;穿刺调节电机带动穿刺同步轮运动。
21.(8)穿刺调节轴承配合穿刺调节板,使得穿刺调节板不随穿刺驱动杆运动,从而达到稳定夹持穿刺同步轮的目的,有效防止穿刺同步轮偏移、移位,同时能够对穿刺调节杆进行限制,防止穿刺调节杆移动,到达稳定准确调节穿刺手术针的目的;穿刺调节滚轴与同步轮凹环配合,对穿刺同步轮进行限位支撑。
22.(9)穿刺稳定器的设置能够稳定的限制穿刺手术针,使穿刺手术针在进行穿刺时能够准确稳定的进行穿刺动作;穿刺稳定套筒通过至少两个相配合的扇环型稳定板拼接而成,方便在需要对穿刺手术针进行穿刺稳定时,对穿刺手术针进行包裹稳定,在进行穿刺训练时松开,方便对训练人员进行训练;扇环型凸板配合相邻扇环型稳定板上的扇环型凹槽,扇环型凹槽配合相邻扇环型稳定板上的扇环型凸板,通过上述设置能够有效防止穿刺手术针进入扇环型凸板、扇环型凹槽间的间隙,从而提升穿刺手术针的穿刺稳定性及穿刺灵活性,杜绝穿刺手术针卡针的可能,既能有效实现对穿刺手术针的稳定效果,还能有效避免穿刺手术针智能化过程中遇到的卡针问题,有效提升了穿刺手术针穿刺过程中的稳定性及效率。
23.(10)穿刺直线轴承的设置,方便穿刺手术针稳定、精准地通过穿刺手术孔,穿刺手术轴承配合圆台型调节筒,通过穿刺手术电机带动穿刺手术齿轮转动,带动调节手术筒转动,使得调节手术筒进入或脱离穿刺手术凹盘,带动圆台型调节筒和穿刺直线轴承移动,方便根据需要对穿刺直线轴承的位置进行调节,而设置防脱挡杆不仅能够防止调节手术筒脱离穿刺手术针后继续远离穿刺手术孔,还能通过挡环电磁铁产生的磁吸作用力将调节手术
筒吸附在穿刺手术孔侧,方便调节手术筒通过螺纹连接与穿刺手术孔结合;支撑连杆的设置能够有效提升电动稳定推杆的稳定性。
24.综上,本发明通过多自由度调节机构对智能穿刺机构进行多自由度调节和控制,通过智能控制机构对多自由度调节机构和智能穿刺机构进行智能控制及远程调节;本穿刺系统通过智能方式进行穿刺手术,有效避免了对穿刺人员经验和手感的依赖程度,大大提升了穿刺手术的效率及穿刺手术的安全性,并且,能够利用本穿刺系统进行穿刺手术训练动作,方便对初学的穿刺人员进行训练,方便初学的穿刺人员快速掌握本穿刺系统的使用方法,有效提升穿刺人员的熟练度,有效避免医疗事故的产生。
附图说明
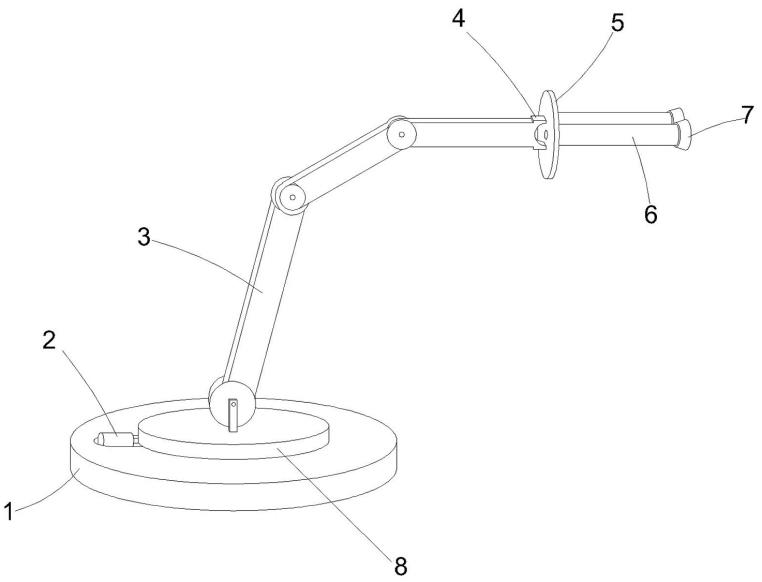
25.图1是实施例1中本发明的结构示意图结构示意图;图2是实施例1中智能控制机构的结构示意图;图3是实施例1中调节转盘的结构示意图;图4是实施例1中穿刺调节盘的结构示意图;图5是实施例1中穿刺固定器的结构示意图;图6是实施例1中穿刺手术结构的结构示意图;图7是实施例1中穿刺手术凹盘的结构示意图;图8是实施例1中穿刺手术筒的结构示意图;图9是实施例1中穿刺调节器的结构示意图;图10是实施例1中穿刺同步轮与穿刺同步带的连接示意图;图11是实施例1中穿刺调节板的结构示意图;图12是实施例1中穿刺稳定套筒的结构示意图;图13是实施例1中扇环型稳定板的结构示意图;图14是实施例1中扇环型稳定板的结构示意图结构示意图;图15是实施例1中穿刺手术凹盘的内部结构示意图。
26.图中,1、支撑底座,2、支撑调节电机,3、多自由度机械臂,4、穿刺支架,5、穿刺调节盘,6、穿刺手术筒,7、穿刺手术凹盘,8、调节转盘,9、远程显示壳体,10、显示触摸屏,11、壳体支撑结构,12、壳体支撑底座,13、底座调节器,14、触控按钮,15、显示副屏,801、调节转轴,802、环形调节齿轮,501、穿刺调节滑槽,502、滑槽同步轮齿,503、滑块调节推杆,504、套筒滑块,505、穿刺固定孔,506、穿刺固定器,507、穿刺固定电机,508、穿刺调节套筒,509、穿刺调节转动槽,510、套筒齿轮,511、穿刺固定套筒,512、套筒开口,513、调节开口,601、穿刺手术轴,602、手术调节轴承,603、手术调节电机,604、调节电机支架,605、电机支架轴承,606、调节电机齿轮,607、手术锥形轮齿,608、穿刺同步凹轮,609、穿刺电动推杆,610、穿刺调节杆,611、调节槽轮齿,612、穿刺导向连杆,614、电动稳定推杆,615、穿刺稳定套筒,616、穿刺调节槽,617、穿刺调节板,618、同步带同步轮齿,619、穿刺调节轴承,620、穿刺驱动杆,621、穿刺同步带,622、穿刺同步轮,623、同步轮凹环,625、驱动同步轮,626、驱动轮轴承,627、穿刺调节电机,628、穿刺调节滚轴,629、扇环型稳定板,630、扇环型凸板,631、扇环型凹槽,701、穿刺调节推杆,702、穿刺真空吸盘,703、穿刺手术针,704、穿刺直线轴承,705、穿刺手术孔,706、穿刺手术轴承,707、穿刺手术电机,708、调节手术筒,709、防脱挡杆,710、穿
刺手术齿轮,711、手术电机轴承,712、圆台型调节筒,713、。
具体实施方式
27.以下通过具体实施例对本发明作进一步说明,但并不限制本发明的范围。
28.实施例1一种多自由度智能穿刺系统,其结构如图1-图15所示,其中图1未表现智能控制机构,图8未表现支撑连杆,图9未表现穿刺调节杆610,图15未表现穿刺调节推杆701,包括智能穿刺机构,智能穿刺机构连接有多自由度调节机构,智能穿刺机构还连接有与智能穿刺机构、多自由度调节机构相配合的智能控制机构;智能控制机构包括智能控制处理器,智能控制处理器连接有数据分析模块、数据存储模块、模式调控模块、动态演示模块及数据传输模块。智能控制机构还包括远程显示壳体9,远程显示壳体9上设有与数据传输模块电性连接的显示触摸屏10,显示触摸屏10的一侧设有与数据传输模块电性连接的显示副屏15;远程显示壳体9背面设有壳体支撑结构11,壳体支撑结构11底端设有壳体支撑底座12,壳体支撑底座12底面上设有底座调节器13;远程显示壳体9底面上设有多个触控按钮14。
29.多自由度调节机构包括多自由度机械臂3,多自由度机械臂3底端设有机械臂调节装置,机械臂调节装置包括支撑底座1,支撑底座1上设有调节转轴801,调节转轴801上设有与多自由度机械臂3相连接的调节转盘8,调节转盘8底面上均布有环形调节齿轮802,环形调节齿轮802与设置在支撑底盘上的支撑调节齿轮相啮合,支撑底座1上设有与支撑调节齿轮相配合的支撑调节电机2;智能穿刺机构包括设置在多自由度机械臂3端部的穿刺支架4,穿刺支架4上设有穿刺调节盘5,穿刺调节盘5上设有穿刺手术结构;多自由度机械、支撑调节电机2均与智能控制处理器电性连接。
30.穿刺手术结构包括至少两个相互配合的穿刺手术筒6,穿刺手术筒6一端均设有与穿刺调节盘5相配合的穿刺手术轴601,穿刺手术轴601远离穿刺手术筒6的一端套设有手术调节轴承602,手术调节轴承602上套设有穿刺同步凹轮608,穿刺同步凹轮608远离穿刺手术筒6的一侧侧面上均布有手术锥形轮齿607,手术锥形轮齿607与设置在穿刺手术轴601端部的手术调节电机603相配合;穿刺调节盘5的中心设有与穿刺支架4间隙配合的穿刺固定孔505,穿刺固定孔505与多个设置在穿刺调节盘5上相对穿刺调节盘5中心对称的穿刺调节滑槽501相连接,穿刺调节滑槽501与穿刺支架4间隙配合;穿刺同步凹轮608均与设置在穿刺调节滑槽501内的滑槽同步轮齿502相啮合;穿刺手术筒6内设有穿刺手术针703,穿刺手术针703上设有穿刺调节器。
31.穿刺调节盘5上设有与穿刺固定孔505相配合的穿刺固定器506,穿刺固定器506包括穿刺固定套筒511,穿刺固定套筒511与套设在穿刺固定孔505内的穿刺调节套筒508相连接,穿刺调节套筒508上套设有穿刺调节转动槽509,穿刺调节转动槽509与套设在穿刺固定孔505内的穿刺调节凸环相配合;穿刺固定套筒511上设有套筒齿轮510,套筒齿轮510与设置在穿刺调节盘5上的穿刺固定电机507相配合;穿刺固定套筒511上设有与穿刺同步凹轮608间隙配合的套筒开口512,套筒开口512与设置在穿刺调节套筒508侧面上的调节开口513相连通;穿刺调节盘5上设有与套筒开口512相配合的套筒滑块504,套筒滑块504与设置在穿刺调节盘5上的滑块调节推杆503相连接。
32.穿刺手术筒6远离穿刺调节盘5的一端均设有穿刺手术凹盘7,穿刺手术凹盘7的上
设有多个与穿刺手术筒6相连接的穿刺电动推杆609,穿刺手术凹盘7内设有多个间隙配合的穿刺调节推杆701,穿刺调节推杆701的活动端均设有穿刺真空吸盘702;穿刺手术筒6内设有与穿刺手术针703相配合的穿刺稳定器;穿刺手术凹盘7上设有与与穿刺手术针703相配合的穿刺手术孔705;手术调节电机603、滑块调节推杆503、穿刺电动推杆609、穿刺调节推杆701、穿刺真空吸盘702均与智能控制处理器电性连接。
33.穿刺调节器包括设置在穿刺手术针703尾端的穿刺调节杆610,穿刺调节杆610上设有穿刺调节槽616,穿刺调节槽616内设有一对通过穿刺同步带621相连接的穿刺同步轮622,穿刺同步轮622间设有穿刺调整间隙;穿刺同步带621外表面上均布有同步带同步轮齿618,同步带同步轮齿618与均布在穿刺调节槽616上的调节槽轮齿611相啮合;穿刺手术筒6内设有与穿刺调节杆610相垂直的穿刺驱动杆620,穿刺驱动杆620上设有与穿刺同步带621内表面相配合的驱动同步轮625,驱动同步轮625通过驱动轮轴承626与穿刺驱动杆620转动连接,驱动同步轮625设置在穿刺调整间隙内与穿刺同步轮622间隙配合;穿刺驱动杆620上设有与驱动同步轮625相配合的穿刺调节电机627。
34.穿刺驱动杆620上设有一对间隙配合的穿刺调节轴承619,穿刺调节轴承619分别设置在穿刺调节杆610两侧,穿刺调节轴承619上设有穿刺调节板617,穿刺调节板617上均设有间隙配合的穿刺调节滚轴628,穿刺调节滚轴628分别与设置在穿刺同步轮622侧面上的同步轮凹环623相配合;穿刺调节电机627与智能控制处理器电性连接。
35.穿刺稳定器包括套设在穿刺手术针703上的穿刺稳定套筒615,穿刺稳定套筒615包括至少两个相配合的扇环型稳定板629,扇环型稳定板629均通过电动稳定推杆614与穿刺手术筒6相连接,扇环型稳定板629的两侧均扇环型凸板630,扇环型凸板630一侧设有与扇环型凸板630相配合的扇环型凹槽631,扇环型凹槽631与设置相邻扇环型稳定板629上的扇环型凸板630相配合;扇环型凸板630与设置在相邻扇环型稳定板629上的扇环型凹槽631相配合。
36.穿刺手术针703上套设有与穿刺手术孔705相配合的穿刺直线轴承704,穿刺直线轴承704靠近穿刺手术凹盘7的一侧设有穿刺手术轴承706,穿刺手术轴承706上套设有圆台型调节筒712,圆台型调节筒712的端部设有与穿刺手术孔705螺纹连接的调节手术筒708,调节手术筒708远离圆台型调节筒712的一端设有防脱挡杆709;调节手术筒708上套设有手术电机轴承711,手术电机轴承711上设有穿刺手术电机707,穿刺手术电机707与设置在调节手术筒708上的穿刺手术齿轮710相配合;防脱挡杆709上设有与穿刺手术凹盘7相配合的挡环电磁铁;扇环型稳定板629上敷设有防护垫层;穿刺手术筒6内设有分别与电动稳定推杆614相连接的支撑连杆;电动稳定推杆614、穿刺手术电机707、挡环电磁铁与智能控制处理器电性连接。
37.根据上述的多自由度智能穿刺系统的方法,步骤包括:穿刺手术和穿刺训练;穿刺手术包括以下步骤:步骤一、穿刺手术前的调整;远程显示壳体9放置到合适位置上,壳体支撑底座12对壳体支撑结构11进行支撑,利用底座调节器13对壳体支撑底座12进行调节,使穿刺人员清楚看到显示触摸屏10、显示副屏15上显示的内容;穿刺人员通过显示触摸屏10或触控按钮14下达对多自由度调节机构的调节指令,调节指令通过数据传输模块传输给智能控制处理器,智能控制处理器通过数
据分析模块对调节指令进行分析处理,分析处理完成的数据传输给智能控制处理器,智能控制处理器精准下达控制指令,支撑调节电机2启动,支撑调节电机2带动支撑调节齿轮与环形调节齿轮802啮合,带动调节转盘8绕支撑底座1上的调节转轴801旋转,带动多自由度机械臂3转动一定角度,控制调节电机关闭,智能控制处理器控制多自由度机械臂3进行进行自动化多自由度调节,调节完成后,穿刺支架4上穿刺调节盘5的穿刺手术结构处于合适位置上,至此,穿刺手术前的调整工作完成。
38.步骤二、智能化穿刺手术;ⅰ、模式选择及调节;穿刺消毒人员利用消毒工具对穿刺手术针703等进行穿刺消毒动作;穿刺人员通过显示触摸屏10选择穿刺模式,并输入相应的病患数据,模式调控模块根据选择的穿刺模式将信息反馈至智能控制处理器,智能控制处理器控制相应的穿刺手术筒6移动到穿刺固定孔505内,具体步骤为:手术调节电机603启动带动调节电机齿轮606转动,电机支架轴承605能够保证调节电机支架604不随手术锥形轮齿607转动,从而带动手术锥形轮齿607转动,带动穿刺同步凹轮608沿穿刺手术轴601上的手术调节轴承602旋转,穿刺同步凹轮608与滑槽同步轮齿502相啮合,使得穿刺同步凹轮608能够沿穿刺调节滑槽501向穿刺固定孔505移动,穿刺同步凹轮608沿套筒开口512、调节开口513进入穿刺固定套筒511、穿刺调节套筒508内,手术调节电机603关闭,启动穿刺固定器506,穿刺固定电机507启动,穿刺固定电机507转动一定角度后停止,套筒齿轮510转动,穿刺固定套筒511带动穿刺调节套筒508转动,穿刺调节套筒508上的穿刺调节转动槽509沿穿刺调节凸环转动一定角度,使套筒开口512正对套筒滑块504且套筒开口512不与穿刺调节滑槽501连通,滑块调节推杆503带动套筒滑块504完全伸展,使套筒滑块504进入套筒开口512的缺口内,对穿刺手术轴601进行限位动作,至此,该选择模式下的穿刺手术筒6移动完成。
[0039]ⅱ、智能化穿刺手术;穿刺手术筒6调整完成后,此时,穿刺手术凹盘7正对患者需要穿刺的初始部位,智能控制处理器控制穿刺电动推杆609伸展,使穿刺手术凹盘7覆盖穿刺部位,穿刺调节推杆701进行调节,使穿刺真空吸盘702与患者皮肤接触,智能控制处理器控制穿刺真空吸盘702吸附在患者皮肤上,使得穿刺手术筒6在穿刺过程中处于静止状态,方便对患者进行穿刺手术动作;进行穿刺时,智能控制处理器控制穿刺驱动杆620上的穿刺调节电机627启动,穿刺调节电机627带动驱动同步轮625绕驱动轮轴承626转动,驱动同步轮625与穿刺同步带621内表面啮合,带动穿刺同步带621运动,带动一对间隙配合的穿刺同步轮622转动,穿刺调节轴承619上的穿刺调节板617在驱动同步轮625转动时始终保持静止状态,穿刺调节滚轴628在同步轮凹环623内移动,能够对穿刺同步轮622、穿刺同步带621的位置进行限制,还能对穿刺调节杆610的位置进行保持,同时方便穿刺同步轮622进行旋转,运动的穿刺同步带621通过同步带同步轮齿618啮合穿刺调节槽616内的调节槽轮齿611,带动穿刺调节杆610向穿刺手术凹盘7侧移动,推动穿刺手术针703通过穿刺直线轴承704逐渐稳定伸出,刺破患者皮肤对患者进行穿刺手术动作;穿刺导向连杆612对穿刺调节杆610进行导向及位置保持;经过一段时间的穿刺后,穿刺手术针703伸出一定长度,到达患者穿刺的最终位置上,穿刺完成,穿刺人员可以通过穿刺手术针703进行进一步取样等处理动作。
[0040]
第三步、穿刺手术后的处理;
处理完成后,穿刺调节电机627反转,通过驱动同步轮625与穿刺同步带621啮合,带动穿刺同步带621反转,带动穿刺手术针703从患者体内穿刺部位抽出,完全抽出后,穿刺人员通过消毒工具对穿刺手术针703等进行穿刺完成消毒,穿刺手术完成。
[0041]
穿刺训练包括以下步骤:步骤一、穿刺训练前的调整;远程显示壳体9放置到合适位置上,壳体支撑底座12对壳体支撑结构11进行支撑,利用底座调节器13对壳体支撑底座12进行调节,使穿刺训练人员清楚看到显示触摸屏10、显示副屏15上显示的内容;穿刺训练人员通过显示触摸屏10或触控按钮14下达对多自由度调节机构的调节指令,调节指令通过数据传输模块传输给智能控制处理器,智能控制处理器通过数据分析模块对调节指令进行分析处理,分析处理完成的数据传输给智能控制处理器,智能控制处理器精准下达控制指令,支撑调节电机2启动,支撑调节电机2带动支撑调节齿轮与环形调节齿轮802啮合,带动调节转盘8绕支撑底座1上的调节转轴801旋转,带动多自由度机械臂3转动一定角度,控制调节电机关闭,智能控制处理器控制多自由度机械臂3进行进行自动化多自由度调节,调节完成后,穿刺支架4上穿刺调节盘5的穿刺手术结构处于合适位置上,至此,穿刺训练前的调整工作完成。
[0042]
步骤二、智能化穿刺手术训练;ⅰ、训练模式开启及调节;穿刺训练人员通过显示触摸屏10选择训练模式,智能控制处理器控制穿刺稳定器脱离穿刺手术针703,分别控制电动稳定推杆614依次收缩,带动该电动稳定推杆614上的扇环型稳定板629与相邻的扇环型稳定板629分离,使穿刺稳定套筒615分离,支撑连杆起到支撑电动稳定推杆614的作用,扇环型凸板630与相邻扇环型稳定板629上的扇环型凹槽631分离,扇环型凹槽631与相邻扇环型稳定板629上的扇环型凸板630分离,从而使扇环型稳定板629脱离穿刺手术针703,穿刺稳定器脱离对穿刺手术针703的稳定支撑状态;控制手术电机轴承711上的穿刺手术电机707启动,穿刺手术电机707带动穿刺手术齿轮710运动,带动调节手术筒708旋转,转动的调节手术筒708在螺纹运动下逐渐脱离穿刺手术孔705,随着穿刺手术电机707的继续转动,调节手术筒708完全脱离穿刺手术孔705,防脱挡杆709对调节手术筒708进行限制,防止调节手术筒708远离穿刺手术孔705,此时,调节手术筒708与穿刺手术孔705分离,穿刺手术轴承706上圆台型调节筒712、穿刺直线轴承704会随穿刺手术针703晃动,穿刺训练模式开启完成。
[0043]ⅱ、训练模式选择及调节;穿刺训练人员通过显示触摸屏10选择穿刺训练模式,并输入相应的模拟病患数据,模式调控模块根据选择的穿刺训练模式将信息反馈至智能控制处理器,智能控制处理器控制相应的穿刺手术筒6移动到穿刺固定孔505内,具体步骤为:手术调节电机603启动带动调节电机齿轮606转动,电机支架轴承605能够保证调节电机支架604不随手术锥形轮齿607转动,从而带动手术锥形轮齿607转动,带动穿刺同步凹轮608沿穿刺手术轴601上的手术调节轴承602旋转,穿刺同步凹轮608与滑槽同步轮齿502相啮合,使得穿刺同步凹轮608能够沿穿刺调节滑槽501向穿刺固定孔505移动,穿刺同步凹轮608沿套筒开口512、调节开口513进入穿刺固定套筒511、穿刺调节套筒508内,手术调节电机603关闭,穿刺固定电机507启动,穿刺固定电机507转动一定角度后停止,套筒齿轮510转动,穿刺固定套筒511带动
穿刺调节套筒508转动,穿刺调节套筒508上的穿刺调节转动槽509沿穿刺调节凸环转动一定角度,使套筒开口512正对套筒滑块504且套筒开口512不与穿刺调节滑槽501连通,滑块调节推杆503带动套筒滑块504完全伸展,使套筒滑块504进入套筒开口512的缺口内,对穿刺手术轴601进行限位动作,至此,该选择训练模式下的穿刺手术筒6移动完成。
[0044]ⅲ、智能化穿刺手术训练;穿刺手术筒6调整完成后,此时,穿刺手术凹盘7正对模拟人体需要穿刺的初始部位,智能控制处理器控制穿刺电动推杆609伸展,使穿刺手术凹盘7覆盖穿刺部位,穿刺调节推杆701进行调节,使穿刺真空吸盘702与模拟人体皮肤接触,智能控制处理器控制穿刺真空吸盘702吸附在模拟人体皮肤上,使得穿刺手术筒6在穿刺过程中处于静止状态,方便对模拟人体进行穿刺手术动作;进行穿刺时,智能控制处理器控制穿刺驱动杆620上的穿刺调节电机627启动,穿刺调节电机627带动驱动同步轮625绕驱动轮轴承626转动,驱动同步轮625与穿刺同步带621内表面啮合,带动穿刺同步带621运动,带动一对间隙配合的穿刺同步轮622转动,穿刺调节轴承619上的穿刺调节板617在驱动同步轮625转动时始终保持静止状态,穿刺调节滚轴628在同步轮凹环623内移动,能够对穿刺同步轮622、穿刺同步带621的位置进行限制,还能对穿刺调节杆610的位置进行保持,同时方便穿刺同步轮622进行旋转,运动的穿刺同步带621通过同步带同步轮齿618啮合穿刺调节槽616内的调节槽轮齿611,带动穿刺调节杆610向穿刺手术凹盘7侧移动,推动穿刺手术针703通过穿刺直线轴承704逐渐稳定伸出,刺破模拟人体皮肤对模拟人体进行穿刺手术动作;经过一段时间的穿刺后,穿刺手术针703伸出一定长度,到达模拟人体穿刺的最终位置上,穿刺训练完成,穿刺训练人员可以通过穿刺手术针703进行进一步训练取样等处理动作,在穿刺过程中,模拟人体内设置的多个穿刺训练传感器对穿刺后的穿刺手术针703位置等进行实时检测及反馈,智能控制处理器将反馈数据传输给显示触摸屏10,并将出现问题的信息通过显示副屏15进行突出显示,方便穿刺训练人员观察。
[0045]
第三步、穿刺训练后的处理;处理完成后,穿刺调节电机627反转,通过驱动同步轮625与穿刺同步带621啮合,带动穿刺同步带621反转,带动穿刺手术针703从模拟人体体内穿刺部位抽出,完全抽出后,穿刺训练人员通过消毒工具对穿刺手术针703等进行穿刺完成消毒,穿刺训练完成。
[0046]
实施例2一种多自由度智能穿刺系统的方法,与实施例1的不同之处在于:步骤包括:穿刺手术;穿刺手术包括以下步骤:步骤一、穿刺手术前的调整;远程显示壳体9放置到合适位置上,壳体支撑底座12对壳体支撑结构11进行支撑,利用底座调节器13对壳体支撑底座12进行调节,使穿刺人员清楚看到显示触摸屏10、显示副屏15上显示的内容;穿刺人员通过显示触摸屏10或触控按钮14下达对多自由度调节机构的调节指令,调节指令通过数据传输模块传输给智能控制处理器,智能控制处理器通过数据分析模块对调节指令进行分析处理,分析处理完成的数据传输给智能控制处理器,智能控制处理器精准下达控制指令,支撑调节电机2启动,支撑调节电机2带动支撑调节齿轮与环形调节齿轮802啮合,带动调节转盘8绕支撑底座1上的调节转轴801旋转,带动多自由度机械臂3转动一定角度,控制调节电机关闭,智能控制处理器控制多自由度机械臂3进行进
行自动化多自由度调节,调节完成后,穿刺支架4上穿刺调节盘5的穿刺手术结构处于合适位置上,至此,穿刺手术前的调整工作完成。
[0047]
步骤二、智能化穿刺手术;ⅰ、模式选择及调节;穿刺消毒人员利用消毒工具对穿刺手术针703等进行穿刺消毒动作;穿刺人员通过显示触摸屏10选择穿刺模式,并输入相应的病患数据,模式调控模块根据选择的穿刺模式将信息反馈至智能控制处理器,智能控制处理器控制相应的穿刺手术筒6移动到穿刺固定孔505内,具体步骤为:手术调节电机603启动带动调节电机齿轮606转动,电机支架轴承605能够保证调节电机支架604不随手术锥形轮齿607转动,从而带动手术锥形轮齿607转动,带动穿刺同步凹轮608沿穿刺手术轴601上的手术调节轴承602旋转,穿刺同步凹轮608与滑槽同步轮齿502相啮合,使得穿刺同步凹轮608能够沿穿刺调节滑槽501向穿刺固定孔505移动,穿刺同步凹轮608沿套筒开口512、调节开口513进入穿刺固定套筒511、穿刺调节套筒508内,手术调节电机603关闭,穿刺固定电机507启动,穿刺固定电机507转动一定角度后停止,套筒齿轮510转动,穿刺固定套筒511带动穿刺调节套筒508转动,穿刺调节套筒508上的穿刺调节转动槽509沿穿刺调节凸环转动一定角度,使套筒开口512正对套筒滑块504且套筒开口512不与穿刺调节滑槽501连通,滑块调节推杆503带动套筒滑块504完全伸展,使套筒滑块504进入套筒开口512的缺口内,对穿刺手术轴601进行限位动作,至此,该选择模式下的穿刺手术筒6移动完成。
[0048]ⅱ、智能化穿刺手术;穿刺手术筒6调整完成后,此时,穿刺手术凹盘7正对患者需要穿刺的初始部位,智能控制处理器控制穿刺电动推杆609伸展,使穿刺手术凹盘7覆盖穿刺部位,穿刺调节推杆701进行调节,使穿刺真空吸盘702与患者皮肤接触,智能控制处理器控制穿刺真空吸盘702吸附在患者皮肤上,使得穿刺手术筒6在穿刺过程中处于静止状态,方便对患者进行穿刺手术动作;进行穿刺时,智能控制处理器控制穿刺驱动杆620上的穿刺调节电机627启动,穿刺调节电机627带动驱动同步轮625绕驱动轮轴承626转动,驱动同步轮625与穿刺同步带621内表面啮合,带动穿刺同步带621运动,带动一对间隙配合的穿刺同步轮622转动,穿刺调节轴承619上的穿刺调节板617在驱动同步轮625转动时始终保持静止状态,穿刺调节滚轴628在同步轮凹环623内移动,能够对穿刺同步轮622、穿刺同步带621的位置进行限制,还能对穿刺调节杆610的位置进行保持,同时方便穿刺同步轮622进行旋转,运动的穿刺同步带621通过同步带同步轮齿618啮合穿刺调节槽616内的调节槽轮齿611,带动穿刺调节杆610向穿刺手术凹盘7侧移动,推动穿刺手术针703通过穿刺直线轴承704逐渐稳定伸出,刺破患者皮肤对患者进行穿刺手术动作;穿刺导向连杆612对穿刺调节杆610进行导向及位置保持;经过一段时间的穿刺后,穿刺手术针703伸出一定长度,到达患者穿刺的最终位置上,穿刺完成,穿刺人员可以通过穿刺手术针703进行进一步取样等处理动作。
[0049]
第三步、穿刺手术后的处理;处理完成后,穿刺调节电机627反转,通过驱动同步轮625与穿刺同步带621啮合,带动穿刺同步带621反转,带动穿刺手术针703从患者体内穿刺部位抽出,完全抽出后,穿刺人员通过消毒工具对穿刺手术针703等进行穿刺完成消毒,穿刺手术完成。
[0050]
实施例3
一种多自由度智能穿刺系统的方法,与实施例1的不同之处在于:步骤包括:穿刺训练;穿刺训练包括以下步骤:步骤一、穿刺训练前的调整;远程显示壳体9放置到合适位置上,壳体支撑底座12对壳体支撑结构11进行支撑,利用底座调节器13对壳体支撑底座12进行调节,使穿刺训练人员清楚看到显示触摸屏10、显示副屏15上显示的内容;穿刺训练人员通过显示触摸屏10或触控按钮14下达对多自由度调节机构的调节指令,调节指令通过数据传输模块传输给智能控制处理器,智能控制处理器通过数据分析模块对调节指令进行分析处理,分析处理完成的数据传输给智能控制处理器,智能控制处理器精准下达控制指令,支撑调节电机2启动,支撑调节电机2带动支撑调节齿轮与环形调节齿轮802啮合,带动调节转盘8绕支撑底座1上的调节转轴801旋转,带动多自由度机械臂3转动一定角度,控制调节电机关闭,智能控制处理器控制多自由度机械臂3进行进行自动化多自由度调节,调节完成后,穿刺支架4上穿刺调节盘5的穿刺手术结构处于合适位置上,至此,穿刺训练前的调整工作完成。
[0051]
步骤二、智能化穿刺手术训练;ⅰ、训练模式开启及调节;穿刺训练人员通过显示触摸屏10选择训练模式,智能控制处理器控制穿刺稳定器脱离穿刺手术针703,分别控制电动稳定推杆614依次收缩,带动该电动稳定推杆614上的扇环型稳定板629与相邻的扇环型稳定板629分离,使穿刺稳定套筒615分离,支撑连杆起到支撑电动稳定推杆614的作用,扇环型凸板630与相邻扇环型稳定板629上的扇环型凹槽631分离,扇环型凹槽631与相邻扇环型稳定板629上的扇环型凸板630分离,从而使扇环型稳定板629脱离穿刺手术针703,穿刺稳定器脱离对穿刺手术针703的稳定支撑状态;控制穿刺手术电机707启动,手术电机轴承711上的穿刺手术电机707带动穿刺手术齿轮710运动,带动调节手术筒708旋转,转动的调节手术筒708在螺纹运动下逐渐脱离穿刺手术孔705,随着穿刺手术电机707的继续转动,调节手术筒708完全脱离穿刺手术孔705,防脱挡杆709对调节手术筒708进行限制,防止调节手术筒708远离穿刺手术孔705,此时,调节手术筒708与穿刺手术孔705分离,穿刺手术轴承706上圆台型调节筒712、穿刺直线轴承704会随穿刺手术针703晃动,穿刺训练模式开启完成。
[0052]ⅱ、训练模式选择及调节;穿刺训练人员通过显示触摸屏10选择穿刺训练模式,并输入相应的模拟病患数据,模式调控模块根据选择的穿刺训练模式将信息反馈至智能控制处理器,智能控制处理器控制相应的穿刺手术筒6移动到穿刺固定孔505内,具体步骤为:手术调节电机603启动带动调节电机齿轮606转动,电机支架轴承605能够保证调节电机支架604不随手术锥形轮齿607转动,从而带动手术锥形轮齿607转动,带动穿刺同步凹轮608沿穿刺手术轴601上的手术调节轴承602旋转,穿刺同步凹轮608与滑槽同步轮齿502相啮合,使得穿刺同步凹轮608能够沿穿刺调节滑槽501向穿刺固定孔505移动,穿刺同步凹轮608沿套筒开口512、调节开口513进入穿刺固定套筒511、穿刺调节套筒508内,手术调节电机603关闭,穿刺固定电机507启动,穿刺固定电机507转动一定角度后停止,套筒齿轮510转动,穿刺固定套筒511带动穿刺调节套筒508转动,穿刺调节套筒508上的穿刺调节转动槽509沿穿刺调节凸环转动一定角度,使套筒开口512正对套筒滑块504且套筒开口512不与穿刺调节滑槽501连通,滑块
调节推杆503带动套筒滑块504完全伸展,使套筒滑块504进入套筒开口512的缺口内,对穿刺手术轴601进行限位动作,至此,该选择训练模式下的穿刺手术筒6移动完成。
[0053]ⅲ、智能化穿刺手术训练;穿刺手术筒6调整完成后,此时,穿刺手术凹盘7正对模拟人体需要穿刺的初始部位,智能控制处理器控制穿刺电动推杆609伸展,使穿刺手术凹盘7覆盖穿刺部位,穿刺调节推杆701进行调节,使穿刺真空吸盘702与模拟人体皮肤接触,智能控制处理器控制穿刺真空吸盘702吸附在模拟人体皮肤上,使得穿刺手术筒6在穿刺过程中处于静止状态,方便对模拟人体进行穿刺手术动作;进行穿刺时,智能控制处理器控制穿刺驱动杆620上的穿刺调节电机627启动,穿刺调节电机627带动驱动同步轮625绕驱动轮轴承626转动,驱动同步轮625与穿刺同步带621内表面啮合,带动穿刺同步带621运动,带动一对间隙配合的穿刺同步轮622转动,穿刺调节轴承619上的穿刺调节板617在驱动同步轮625转动时始终保持静止状态,穿刺调节滚轴628在同步轮凹环623内移动,能够对穿刺同步轮622、穿刺同步带621的位置进行限制,还能对穿刺调节杆610的位置进行保持,同时方便穿刺同步轮622进行旋转,运动的穿刺同步带621通过同步带同步轮齿618啮合穿刺调节槽616内的调节槽轮齿611,带动穿刺调节杆610向穿刺手术凹盘7侧移动,推动穿刺手术针703通过穿刺直线轴承704逐渐稳定伸出,刺破模拟人体皮肤对模拟人体进行穿刺手术动作;经过一段时间的穿刺后,穿刺手术针703伸出一定长度,到达模拟人体穿刺的最终位置上,穿刺训练完成,穿刺训练人员可以通过穿刺手术针703进行进一步训练取样等处理动作,在穿刺过程中,模拟人体内设置的多个穿刺训练传感器对穿刺后的穿刺手术针703位置等进行实时检测及反馈,智能控制处理器将反馈数据传输给显示触摸屏10,并将出现问题的信息通过显示副屏15进行突出显示,方便穿刺训练人员观察。
[0054]
第三步、穿刺训练后的处理;处理完成后,穿刺调节电机627反转,通过驱动同步轮625与穿刺同步带621啮合,带动穿刺同步带621反转,带动穿刺手术针703从模拟人体体内穿刺部位抽出,完全抽出后,穿刺训练人员通过消毒工具对穿刺手术针703等进行穿刺完成消毒,穿刺训练完成。
[0055]
实施例4一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺支架4为u型穿刺支架。
[0056]
实施例5一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术凹盘7上设有与挡环电磁铁相配合的凹盘电磁铁。
[0057]
实施例6一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括一个穿刺手术筒6。
[0058]
实施例7一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括两个相互配合的穿刺手术筒6。
[0059]
实施例8一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括三个
相互配合的穿刺手术筒6。
[0060]
实施例9一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括四个相互配合的穿刺手术筒6。
[0061]
实施例10一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括五个相互配合的穿刺手术筒6。
[0062]
实施例11一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括六个相互配合的穿刺手术筒6。
[0063]
实施例12一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括七个相互配合的穿刺手术筒6。
[0064]
实施例13一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括八个相互配合的穿刺手术筒6。
[0065]
实施例14一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括九个相互配合的穿刺手术筒6。
[0066]
实施例15一种多自由度智能穿刺系统,与实施例1的不同之处在于:穿刺手术结构包括十个相互配合的穿刺手术筒6。
[0067]
以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
