移动式作业机械、控制移动式作业机械的控制系统及方法
背景技术:
1.本发明涉及移动式作业机械和用于控制该作业机械的方法以及控制系统,并且涉及软件产品。
2.移动式作业机械用于诸如不平坦的地形和斜坡等苛刻的条件。例如,如果斜坡上的作业机械的部件损坏或出现故障,由于情况发生得如此之快,即使操作员有机会启用操作制动器或紧急停止按钮,控制作业机械也是最具挑战性的。
技术实现要素:
3.因此,本发明的目的是开发一种新的作业机械、控制系统和方法以及软件产品。根据本发明的解决方案的特征在于独立权利要求中公开的内容。在从属权利要求中公开了本发明的优选实施方式。
4.在提出的解决方案中,液压作业机械的液压动力传动系统中的泵的压力水平、或可供给至电动作业机械的电驱动马达的动力被监测,并且/或者作业机械的驱动马达的输出处的旋转速度和作业机械的移动装置的旋转被监测。液压动力传动泵的压力水平或可供给至电驱动马达的动力与较低阈值进行比较以检测故障情况,并且/或者驱动马达的输出处的旋转速度与移动装置的旋转进行比较以检测故障情况。在检测到故障情况的情况下,作业机械的制动系统被控制成应用制动器。所公开的解决方案允许检测各种故障情况,并且在检测到故障情况之后,可以自动启用作业机械的制动器,并且因此可以控制作业机械。
附图说明
5.现在结合优选实施方式并且参照附图更详细地描述本发明,在附图中,相同的附图标记标识相同的元件:
6.图1示出了移动式作业机械;
7.图2示出了另一移动式作业机械;
8.图3示出了移动式作业机械的一些部件的图;
9.图4示出了移动式作业机械的控制系统的图。
具体实施方式
10.近来,移动式作业机械越来越多地用于诸如不平坦的地形和斜坡等苛刻的条件。例如,在斜坡上收割木材越来越常见。当与在平坦表面上的正常情况相比时,在斜坡条件下,作业机械上的载荷增大。增大的载荷增加了部件上的应变,并且缩短了它们的使用寿命。这就是为什么与以前相比在斜坡条件下部件出现故障更多,并且其他故障情况会更经常地出现。
11.当作业机械在斜坡上并出现故障状况时,由于情况发生得很快,无论操作员是否有机会应用操作制动器或紧急停止按钮,作业机械的控制都可能最具挑战性。有时,情况可能非常棘手,以至于操作员甚至无法执行必要的动作来控制作业机械。
12.如以上所阐述的,在提出的解决方案中,液压作业机械的液压传动系统中的泵的压力水平被监测,或者可供给至电动作业机械的电驱动马达的动力被监测,并且/或者作业机械的驱动马达的输出处的旋转速度和作业机械的移动装置的旋转被监测。液压动力传动泵的压力水平或可供给至电驱动马达的动力与较低阈值进行比较以检测故障情况,并且/或者驱动马达的输出处的旋转速度与移动装置的旋转进行比较以检测故障情况。在检测到故障情况的情况下,作业机械的制动系统被控制成应用制动器。根据实施方式,制动利用驻车制动器和/或工作制动器进行。根据实施方式,液压动力传动系统中的泵的较低阈值可以是液压动力传动系统中的标称压力的50%或更小。故障情况确实可以非常快地被检测到。同样,控制工作机械的措施,换句话说,制动器的启用可以快速且可靠地执行。
13.根据实施方式,液压动力传动系统包括供给泵、液压驱动马达,并且有利地包括驱动泵,并且液压动力传动系统中的泵的压力水平利用压力传感器来监测。根据第二实施方式,驱动马达是电动马达,并且为了监测可供给至供给马达的动力,将动力供给至电动马达的诸如电池之类的装置的电压水平被监测。在所公开的解决方案中,对泵压力水平和可供给至驱动马达的动力的监测可以以简单且可靠的方式实现。
14.根据实施方式,驱动马达输出的旋转速度利用监测驱动马达的旋转的旋转速度传感器来监测。这样,对驱动马达的输出的监测可以以简单且可靠的方式实现。
15.根据实施方式,移动装置的旋转利用旋转速度传感器来监测。这样,对移动装置的旋转的监测可以以简单且可靠的方式来实现。这样的传感器也可以结合作业机械简单地被改造作为改型。
16.根据实施方式,监测移动装置的旋转的旋转速度传感器适于直接监测移动装置的旋转或直接连接至移动装置的诸如差动齿轮之类的部件的旋转。在这种情况下,可以相当广泛地检测与驱动动力传动有关的潜在故障情况。
17.根据实施方式,移动装置的旋转通过监测作业机械与表面、即地面之间的运动的速度和/或方向来监测。因此,作业机械可以具有测量作业机械与地面之间的运动的速度和/或方向的传感器。例如,这样的传感器可以是作业机械的加速度传感器。
18.根据实施方式,制动系统包括工作制动器和驻车制动器,并且控制单元适于响应于检测到第一故障情况和/或第二故障情况而至少控制驻车制动器。这样,作业机械可以以有效、简单且可靠的方式被监测。
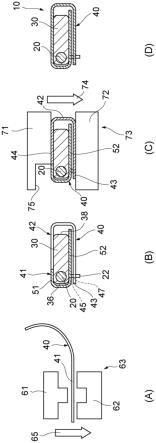
19.参照图1和图2,图1和图2示出了作业机械。作业机械1可以包括移动式作业机械1、并且特别有利地包括适用于在倾斜和/或不平坦的表面上移动的移动式作业机械1。这样的移动式作业机械可以是例如林业作业单元,比如图1中的转运机、图2中的收割机,或者另一林业机械,比如另一类型的适于承载负载的驱动机械,或者转运机或收割机的组合,或另一移动式作业机械,比如采矿机或挖掘机。
20.作业机械1可以包括一个或更多个本体部分11和适于至少一个本体部分的悬臂结构14。例如,作业机械还可以包括适于悬臂结构14的工具16。工具可以包括例如提升构件比如装载斗和/或木材处理工具比如收割机头部。林业机械可以本体转向,并且包括至少两个本体部分11。
21.根据实施方式,作业机械1还可以包括其他结构部分。例如,作业机械1可以包括适于在至少一个本体部分11上的控制舱12。作业机械1还可以包括移动装置13,移动装置13可
以包括以下各者中的至少一者:适于在轴上的车轮、适于在摆动轴上的车轮、适于在串联轴或转向架上的车轮、轨道系统或其他本身已知的使作业机械相对于其作业表面移动的装置。对于本领域技术人员来说显而易见的是,根据作业机械的类型,作业机械1通常包括许多附加结构和功能结构部分和实体,比如货物空间15、动力源17等。
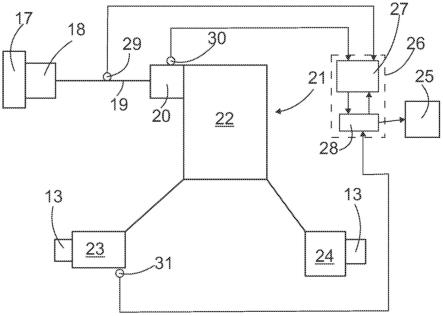
22.图3示出了与移动式作业机械1的移动相关联的一些部件和控制系统的一些部件的图。例如可以是柴油马达的动力源17使供给泵18旋转。供给泵18产生液压系统19的体积流量,并且液压系统上的负载产生压力。利用液压系统19中的液压流体的能量,使驱动马达20旋转。因此,液压作业机械1中的驱动马达20是液压马达。
23.在电动作业机械1中,驱动马达20是电动马达。在电动作业机械中,能量通过诸如电池之类的能量供应装置被供应至驱动马达20。
24.在驱动马达20与移动装置13之间存在驱动动力传动装置21。驱动动力传动装置21可以包括机械齿轮箱和诸如车轴、转向架、接头等的机械驱动动力传动装置。替代性地,驱动动力传动装置21可以是液压的或电动的。图3通过示例的方式示出了驱动动力传动装置的齿轮箱22、前差速齿轮23和后差速齿轮24。并未示出驱动动力传动装置21中的所有部件及其细节,因为它们对于本领域技术人员来说是公知和显而易见的。
25.图3附加地示出了制动器25作为参照。移动式作业机械1可以具有工作制动器和驻车制动器。可以借助于诸如液压流体之类的加压的压力介质将力传递到形成用于使移动式作业机械1停止的工作制动器的制动装置的部分,该力启用工作制动器以使移动式作业机械停止。关于驻车制动器的制动装置,可能存在诸如弹簧之类的挠性构件,该挠性构件在没有力借助于加压的压力介质施加到制动装置时保持驻车制动器被启用。因此,可以通过加压的压力介质将力引导到形成驻车制动器的制动装置的部分,该力使驻车制动器释放,从而允许作业机械运动。当压力介质对驻车制动器的力作用结束时,驻车制动器被启用,从而防止停放的作业机械开始自行移动。特别地在林业机械中使用的典型的作业机械制动器是压力介质操作的、例如液压操作的组合式工作和驻车制动器,其中,同一制动装置具有用以启用组合在该制动装置中的驻车制动器和工作制动器两者的装置。在此上下文中未示出制动器、驻车制动器的液压系统和工作制动器的液压系统的结构细节,因为所涉及的问题对于本领域技术人员是已知和显而易见的。
26.移动式作业机械1具有控制单元26。控制单元26可以是一个实体,或者控制单元可以包括两个或更多个单元。在图3的情况下,控制单元26包括机械控制单元27和附加控制单元28。机械控制单元27和附加控制单元28可以利用诸如can总线之类的数据传输总线连结。
27.关于作业机械的操作的信息收集在控制单元26中。例如,该信息可以从各种传感器获得。作业机械的操作利用控制单元26来控制。在图3中,制动器25的控制呈现为这种控制的示例。
28.与液压系统19的供给泵18连接的是压力传感器29。压力传感器29监测液压动力传动系统的供给泵中的液压流体的压力水平、即液压系统19中的供给压力,并且将关于压力水平的信息发送到控制单元26。
29.与驱动马达20连接的是旋转速度传感器30。旋转速度传感器30监测驱动马达20的旋转,并且将关于驱动马达20的旋转速度的信息发送到控制单元26。
30.与前差速齿轮23连接的是旋转速度传感器31。旋转速度传感器31监测前差速齿轮
23的旋转和旋转方向,并且将关于前差速齿轮23的旋转速度和旋转方向的信息发送到控制单元26。
31.如果借助于压力传感器29检测到液压系统19的供给压力的压力水平太低,则响应于检测到压力水平太低,向制动器25发出控制命令。在这种情况下,控制单元26相应地启用制动器25。
32.液压系统19中的供给压力的过低水平可以建立,使得例如压力传感器29将压力信息传送到控制单元26,并且在控制单元26中设定有较低阈值。此时,控制单元26将压力信息与较低阈值进行比较,并且如果该值低于较低阈值,则向制动器25发出控制命令。压力传感器29也可以是较低阈值传感器,其在值低于较低阈值的情况下直接向控制单元26发出警报,并且控制单元在接收到警报时向制动器25发出控制命令。
33.液压系统在正常使用情况下的正常压力或标称压力可能会根据负载情况而变化,例如,在20巴与28巴之间变化。在这样的实施方式中,例如,压力的较低阈值水平可以设定为9巴。因此,根据实施方式,压力水平的较低阈值可以是液压动力传动系统中的标称压力的50%或更小。即使标称压力变化,较低阈值也可以设定为固定,或者较低阈值可以根据标称压力的变化而变化。
34.除了发出用于制动器25的命令之外,控制单元26还可以向用户发出报警指示。报警指示可以是例如开启报警灯比如led灯、声音信号或显示在用户界面上的报警符号、或者向用户指示报警的另一种实现方式。
35.液压系统19中的供给压力水平过低表明作业机械的故障情况。在故障情况下,液压流体可能无法控制地排出。通过监测压力水平,因此可以检测到以下故障中的一个或更多个故障:(飞轮与泵之间的)接头/阻尼器故障、大多数驱动泵故障、大多数驱动马达故障、驱动液压装置中的软管断裂、供给泵故障、使用供给压力的系统比如齿轮箱中的传输缸的泄漏。
36.具体地,所公开的解决方案允许检测故障情况。相反,例如,由负载变化导致的驱动马达中可能的压力变化并不是利用所阐述的解决方案检测到的故障情况。
37.代替或者除了以上公开的基于液压系统19中的供给压力的过低水平来控制制动器之外,制动器可以根据由旋转速度传感器30和31提供的信息来控制。该实现方式还可以描述成使得故障情况借助于压力传感器29和/或旋转速度传感器30和31来检测,并且响应于检测到故障情况,向制动器25发出控制命令。
38.实施方式的构思是,控制单元26在这种情况下启用驻车制动器以供使用。第二实施方式的构思是,控制单元26在这种情况下启用工作制动器以供使用。又一实施方式的构思是,控制单元26在这种情况下启用工作制动器和驻车制动器两者以供使用。
39.在正常情况下,驱动马达20以特定速度旋转,并且前差速器23以相对于驱动马达20的旋转具有特定比率的速度旋转。该比率由驱动动力传动装置21确定。在公开的解决方案中,控制单元26将驱动马达20的旋转速度传感器30的旋转速度信息与前差速齿轮23的旋转速度传感器31的旋转速度信息进行比较。如果旋转速度之间的差比在正常情况下大,则控制单元26向制动器25发出控制命令,并且向用户发出报警指示。通过将获得的指示移动装置13的运动方向的方向信息与移动装置13基于驱动马达20的输出应该移动的方向进行比较,可以利用前差速齿轮23的旋转速度传感器31的方向信息。如果移动装置13的运动方
向与期望的方向不同,则向制动器25发出控制命令,并且向用户发出报警指示。因此,如果作业机械1开始在与期望的方向不同的方向上移动,则启用制动器25。
40.驱动马达20的旋转速度传感器30是监测驱动马达20的旋转速度、因此监测驱动马达20的输出处的旋转速度、因此监测驱动马达20的轴的旋转速度的传感器。驱动马达20输出的旋转速度还可以通过例如基于驱动动力传动装置的泵的吞吐量和马达角度、即马达的排量来计算驱动马达20输出的旋转速度来监测。
41.前差速齿轮23的旋转速度传感器31是监测移动装置13的旋转的传感器。因此,移动装置13的旋转可以利用监测差速器的旋转的旋转速度传感器来监测。根据实施方式,移动装置13的旋转可以利用下述旋转速度传感器来监测:该旋转速度传感器直接监测移动装置13的旋转或监测直接连接至移动装置13的部件比如车轮轴、差速器或转向架的旋转。当移动装置13的旋转或与其直接连接的部件的旋转利用旋转速度传感器来直接监测时,就驱动动力传动装置而言,可以相当广泛地检测到可能的故障情况。
42.根据实施方式,移动装置13的旋转通过监测作业机械1与表面、即地面之间的运动的速度和/或方向来检测。因此,作业机械1可以具有测量作业机械1与表面之间的运动的速度和/或方向的传感器。例如,这样的传感器可以是作业机械1的加速度传感器。这样的加速度传感器可以与控制单元26分开或集成到控制单元26中。
43.所公开的解决方案还可以描述成使得检测到的是用于使作业机械1移动的驱动马达20的输出的旋转速度,换句话说,是作业机械1应该如何移动(运动的方向和速度)。作业机械1的运动的实际速度和方向从移动装置13检测。如果来自移动装置13的检测与从驱动马达20获得的检测不同,则这是故障情况。这样,可以广泛地检测与驱动动力传动装置21有关的故障情况。可检测的故障可以是以下故障中的一个或更多个故障:齿轮箱损坏、齿轮箱脱挡、转向架故障、驱动轴故障、驱动马达轴断裂。
44.根据实施方式,如果驱动马达20的输出处的旋转速度与从移动装置测量的可比旋转速度之间的值彼此相差大于标称马达旋转速度的3%,则该情况被确定为故障情况。根据第二实施方式,故障情况被确定为偏差大于5%或偏差大于10%。
45.作业机械1可以具有用于监测作业机械是否在斜坡上的传感器。这样的传感器可以与控制单元26分开或集成到控制单元26中。由于当作业机械1在斜坡上时,上述故障情况可能更难控制,因此可以对系统进行调整,使得在检测到作业机械1在斜坡上时启用该系统。
46.图4图示了作业机械1的控制系统。控制单元26包括机械控制单元27和附加控制单元28。机械控制单元27可以包括第一控制模块47和第二控制模块48。附图标记49图示了模块47与48之间的信息传输和数据传输协议。代替使用第一控制模块47和第二控制模块48,控制单元可以自然地仅通过使用一个控制模块来实现,或者也可以存在多于两个的控制模块。
47.附加控制单元28通过数据传输总线32连接至第一控制模块47。第一控制模块47具有用于压力传感器29的压力信号33的输入部。对应地,第二控制模块48具有用于旋转速度传感器30的旋转速度信号34的输入部,并且附加控制单元28具有用于旋转速度传感器31的旋转速度信号35的输入部。
48.第一控制模块47的块41接收压力信号33并将其转发到第二控制模块48的块42。附
加控制单元28的块39接收旋转速度传感器31的旋转速度信号35并在其中设定时间戳。块39将旋转速度信号和时间戳转发到第一控制模块47的块40。块40接收旋转速度信号和时间戳并将其转发到第二控制模块48的块42。
49.因此,第二控制模块48的块42从块40和41接收信息并将它们转发到块43。块43考虑驱动动力传动装置21的影响,即,将旋转速度传感器31的旋转速度信号35的值转换成能够与旋转速度传感器30的旋转速度信号34比较。块43将该信息转发到逻辑块44。
50.因此,逻辑块44从块43接收信息。此外,逻辑块44接收旋转速度传感器30的旋转速度信号34。逻辑块44将压力信号33的值与较低阈值进行比较,并且如果该值低于较低阈值,则向第一控制模块47的块45发出控制命令。此外,逻辑块44还将旋转速度传感器30的旋转速度信号34的值与旋转速度传感器31的旋转速度信号35的可比值进行比较,并且如果这些值彼此相差太大,则向第一控制模块47的块45发出控制命令。例如,当这些值之间的差大于马达旋转速度的标称最大值的3%时,这些值可能被定义为彼此相差太大。如果马达的标称最大值是例如4500rpm,则指示故障情况的值可以是例如200rpm。
51.因此,第一控制模块47的块45从逻辑块44接收控制命令。块45将控制命令转发到附加控制单元28的块46。
52.附加控制单元28的块46接收控制命令,并且形成制动控制信号36和报警装置的控制信号38。块46经由制动控制信号输出将制动控制信号36发送到制动器25,并且经由报警装置的控制信号输出将报警装置的控制信号38发送到报警装置37。
53.结合图4描述的控制系统也可以称为自动制动控制系统。根据实施方式,如果报警装置37是诸如led灯等指示灯,则报警装置的控制信号38可以在系统使用和正常操作时控制指示灯持续亮起。当系统不在使用或具有故障状况时,报警装置的控制信号38可以控制指示灯熄灭。当系统发出制动控制信号36来控制制动器25时,报警装置的控制信号38可以控制指示灯闪烁。
54.因此,图4中示出的控制单元26可以包括作为设备的部分的附加控制单元28、第一控制模块47和第二控制模块48。附加控制单元28接收来自移动装置13的传感器脉冲/信号,并且控制制动器25和报警装置37的启用。附加控制单元28连接至第一控制模块47。第一控制模块47在附加控制单元28与第二控制模块48之间传递信息/消息。第二控制模块48包含比较初始数据、进行推导并基于它们定义控制命令的操作逻辑。
55.这里公开的自动制动控制系统也可以改装到现有的作业机械1上。显然,现有的作业机械1可以具有第一控制模块47、第二控制模块48、压力传感器29、驱动马达20的传感器30和制动器25。在改装时,必须安装在作业机械1中的仅有的物理装置是与移动装置13连接的传感器、报警装置37和附加控制单元28。此外,需要在控制单元26中执行所需的计算机程序改变。
56.控制单元26中的计算机程序产品包括计算机可读程序代码,该计算机可读程序代码设置成在由处理器执行该程序代码时实现所公开的自动制动控制系统的功能或执行这些功能的方法的步骤。控制单元26包括处理装置或处理器。控制单元26可以包括已经收集和存储信息以及正在收集和存储信息的存储器。处理装置可以适于执行本说明书中公开的处理步骤和/或操作的至少部分处理步骤和/或操作。在实施方式中,处理装置可以适于接收和发送信息和命令。例如,处理装置可以包括可编程逻辑和/或可编程微处理器。处理装
置可以形成控制单元26或其一部分。
57.实施方式包括计算机程序,该计算机程序包括程序代码,当在计算机上执行时,该程序代码执行根据上述实施方式中的任一实施方式的功能。计算机程序可以包括在计算机可读存储介质中,例如包括在非易失性存储器中。
58.实施方式包括计算机程序产品,该计算机程序产品包括根据实施方式的用于执行根据上述实施方式中的任一实施方式的功能的计算机程序。
59.在实施方式中,该设备包括配置成执行在实施方式中描述的功能的处理装置。处理装置可以用作用于执行程序代码的计算机。处理装置可以包括能够执行程序代码的至少一个处理器、存储器和程序平台。
60.实施方式可以实现为由计算机程序定义的计算机进程。该计算机程序可以是源代码格式、目标代码格式或中间格式,并且该计算机程序可以存储在存储介质上,该存储介质可以是能够存储该计算机程序的任何件或设备。例如,计算机程序可以存储在可以由计算机或处理器读取的计算机程序分发介质上。例如,计算机程序分发介质可以包括存储介质、计算机存储器、只读存储器(rom)、电载波、电信信号和软件分发包。
61.在实施方式中,计算机程序产品可以存储在计算机可读介质上并且可以由处理器执行,并且该计算机程序产品可以包括计算机可读程序代码。这种类型的计算机程序产品可以设置成当程序代码在处理器中运行时执行上述方法中的步骤中的至少一些步骤。
62.计算机程序在控制单元26中运行具有由程序步骤的执行和转发信息引起的自然延迟。处理器速度和设备的其他特性会影响操作速度。可靠性性能可能会导致另外的延迟。尽管如此,所公开的解决方案允许在从出现故障情况起远小于1秒内发出控制命令来控制制动器25。根据实施方式,控制系统的操作延迟小于600ms,有利地小于400ms。
63.由于可靠性性能,可能会限定以下条件中的一个或更多个条件。针对旋转速度传感器之间的差给出具体的允许公差,并且在超出该公差时定义为故障情况。此外,可以限定的是,在定义已经发生故障情况之前,必须存在特定数目的超过值的情况或存在错误消息。例如,可以结合启动限定的是,在可以针对低供给压力定义故障情况之前,必须在多个连续计算回合中满足动力源17的运行条件。这样确保了例如在结合启动柴油发动机时压力水平有足够的时间上升。
64.本领域技术人员将发现,显而易见的是,随着技术的进步,本发明的基本构思可以以许多不同的方式实现。因此,本发明及其实施方式不限于上述示例,而是可以在权利要求的范围内变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。