垫料调节器及使用其的方法
1.相关申请的交叉引用
2.本技术要求2019年12月23日提交的、名称为“垫料调节器(litter conditioner)”的美国临时专利申请第62/952,818号的优先权和权益,其公开内容通过引用整体并入本文。
背景技术:
3.本文所述的实施例涉及调节和/或处理垫料,并且更具体地,涉及配置成调节家禽垫料的至少半自主机器。
4.调节和/或处理垫料是家禽养殖中的已知挑战。家禽垫料由垫底材料(刨花、稻壳等)、粪便、羽毛和其他成分组成。在一些情况下,保持垫料干燥可以帮助控制氨水平,可以减少对家禽的脚和/或胸部的伤害,并且可以为家禽以及在禽舍工作的人提供更健康的环境。垫料条件会影响禽群的健康和品质,进而影响养殖者的利润。
5.一般而言,当垫料开始保持水分时它会结块和/或聚块。垫料中的水分可以来自粪便以及禽舍中的过大湿度(例如,由于通风不足)。此外,随着垫料开始结块和聚块,吸收额外水分的能力会降低,进而导致氨含量增加(与家禽粪便相关联)。尽管充分的通风可以减轻这些影响,但通风成本会是高昂的。替代地,可以通过手动或半手动过程调节垫料,但这样的过程可能是耗时的、劳动密集型的和/或对从事该工作的人是有害的。
6.因此,需要调节家禽垫料的改进系统和方法。
技术实现要素:
7.在一些实施例中,至少半自主垫料调节载具可以包括底盘。驱动系统联接到底盘并且配置成沿着动物围栏的地板移动垫料调节载具。收集系统联接到底盘的前部分并且配置成从地板收集垫料。收集系统包括配置成减小垫料的颗粒尺寸的连枷(flailer)。调节系统沿着底盘的长度联接。调节系统包括具有内部容积的滚筒,所述内部容积可以接收来自收集系统的垫料。滚筒配置成旋转以翻滚设置在内部容积中的垫料。调节系统的加热元件配置成当垫料在滚筒中翻滚时将热能传递到垫料。分散系统联接到底盘的后部分,并且配置成接收来自调节系统的经调节的垫料并将经调节的垫料分散在垫料调节载具后面的地板上。
附图说明
8.图1是根据实施例的至少半自主垫料调节器的示意图。
9.图2是根据实施例的至少半自主垫料调节器的侧视图。
10.图3和4是图2的垫料调节器的一部分的侧视图。
11.图5是包括在图2的垫料调节器中的收集和输送组件的至少一部分的侧视图。
12.图6和7分别是包括在图2的垫料调节器中的连枷组件的前视图和侧视图。
13.图8和9是包括在图2的垫料调节器中的调节组件的至少一部分的侧视图。
14.图10和11是包括在图2的垫料调节器中的散布组件的至少一部分的俯视图和端视图。
15.图12是图2的垫料调节器的至少一部分的后视图,并且示出了例如图8和9的调节组件的一部分。
16.图13是图2的垫料调节器的至少一部分的侧视图,并且示出了例如图10和11的散布组件的一部分。
17.图14和15分别是根据实施例的至少半自主垫料调节器的前视图和后透视图。
18.图16-20是示出图14的垫料调节器的一个或多个系统的各种视图。
19.图21-23是示出包括在图14的垫料调节器中的收集系统的至少一部分的各种视图。
20.图24-28是包括在图14的垫料调节器的调节系统中的滚筒或其部件的各种视图。
21.图29是包括在图14的垫料调节器中的调节系统和分散系统的至少一部分的后透视图。
22.图30是示出根据实施例的使用至少半自主垫料调节器的方法的流程图。
具体实施方式
23.本文描述的实施例和/或实施方式涉及至少半自主垫料调节器(例如,机器、机器人、载具等),其可以调节、处理和/或更新禽舍和/或用于动物圈养和/或生产的其他动物围栏内部的家禽垫料和/或其他动物粪便和/或垫底材料。一般而言,动物垫料,特别是家禽垫料,在开始保持水分时会结块和/或聚块,导致在给定时间后需要调节和/或更换垫料。本文所述的实施例和/或实施方式可以在禽舍和/或其他动物围栏内部时在一个或多个自主或半自主过程中通过例如热处理和/或类似方法调节、处理和/或更新垫料而不会损坏围栏和/或对围困在其中的动物造成伤害。通过参考某些实施例和/或附图的以下详细描述,将更容易理解各种垫料调节器的潜在实施例。
24.在一些实施例中,至少半自主垫料调节载具包括底盘。驱动系统联接到底盘并且配置成沿着动物围栏的地板移动垫料调节载具。收集系统联接到底盘的前部分并且配置成从地板收集垫料。收集系统包括配置成减小垫料的颗粒尺寸的连枷。调节系统沿着底盘的长度联接。调节系统包括具有内部容积的滚筒,所述内部容积可以接收来自收集系统的垫料。滚筒配置成旋转以翻滚设置在内部容积中的垫料。调节系统的加热元件配置成当垫料在滚筒中翻滚时将热能传递到垫料。分散系统联接到底盘的后部分,并且配置成接收来自调节系统的经调节的垫料并将经调节的垫料分散在垫料调节载具后面的地板上。
25.在一些实施例中,至少半自主垫料调节载具包括底盘。收集系统联接到底盘的前部分并且配置成当垫料调节载具沿着动物围栏的地板移动时从地板收集垫料。收集系统包括配置成将垫料的颗粒尺寸减小到第一平均颗粒尺寸的连枷。调节系统沿着底盘的长度联接并且包括进料机构、滚筒和加热元件。进料机构配置成(i)接收具有第一颗粒尺寸的垫料,(ii)将垫料的颗粒尺寸从第一颗粒尺寸减小到第二颗粒尺寸,以及(iii)将具有第二平均颗粒尺寸的垫料的至少一部分提供到滚筒的内部容积中。滚筒配置成旋转以翻滚设置在内部容积中的垫料。加热元件配置成当垫料在滚筒中翻滚时将热能传递到垫料。分散系统联接到底盘的后部分,并且配置成接收来自调节系统的经调节的垫料并将经调节的垫料分
散在垫料调节载具后面的地板上。
26.在一些实施方式中,使用至少半自主垫料调节载具的方法包括当垫料调节载具沿着动物围栏的地板移动时从地板收集垫料。收集的垫料的平均颗粒尺寸减小,并且垫料被提供到包括在垫料调节载具的调节系统中的滚筒的内部容积中。滚筒旋转以翻滚设置在滚筒的内部容积中的垫料,并且当垫料在滚筒的内部容积中翻滚时热能从加热元件传递到垫料。在滚筒中的预定停留时间之后,将经调节的垫料提供给分散系统。分散系统配置成将经调节的垫料分散在基本上在垫料调节载具后面的地板的一部分上。
27.在一些实施例中,滚动垫料调节器可以配置成将禽舍内的垫料加热处理到足以从垫料消除至少90%的病原体的温度。禽舍可以具有距禽舍地板96英寸或更小的天花板。垫料调节器包括配置成将垫料加热到期望平均温度(例如,至少170华氏度(
°
f)的平均温度)的加热系统,配置成从地板去除垫料并将垫料输送到加热系统的收集系统,和/或配置成接收来自加热系统的垫料并将垫料返回到地板的分散系统。在一些实施方式中,垫料调节器配置成由独立载具牵引、自行推进、远程控制和/或自主控制中的至少一种。
28.本文使用的术语仅用于描述特定实施例的目的,并不旨在限制权利要求的全部范围。除非另有定义,否则本文使用的所有技术和科学术语具有与本领域普通技术人员通常理解的相同含义。
29.如在本说明书中使用的,单数形式“一(a)”、“一个(an)”和“该(the)”包括复数指代物,除非上下文另有明确规定。例如,术语“构件”旨在表示单个构件或构件的组合,“材料”旨在表示一种或多种材料或其组合。关于本文中基本上任何复数和/或单数术语的使用,本领域技术人员可以根据上下文和/或应用从复数翻译成单数和/或从单数翻译成复数。为了清楚起见,可以在本文中明确阐述各种单数/复数排列。
30.一般而言,本文特别是所附权利要求中使用的术语通常意指“开放”术语(例如,术语“包括”应解释为“包括但不限于”,术语“具有”应解释为“至少具有”等)。类似地,当在本说明书中使用时,术语“包括”和/或“包含”指定所述特征、整数(或其分数)、步骤、操作、元件和/或部件的存在,但不排除一个或多个其他特征、整数(或其分数)、步骤、操作、元件、部件和/或它们的组的存在或添加。如本文所用,术语“包括”表示“包括但不限于”。
31.如本文所用,术语“和/或”包括相关列出项目中的一个或多个的任何和所有组合。应当理解,无论是在说明书、权利要求书还是附图中,呈现两个或更多个替代术语的任何合适的分离词和/或短语都考虑包括术语之一、任一术语或两个术语的可能性。例如,短语“a或b”将被理解为包括“a”或“b”或“a和b”的可能性。
32.本文公开的所有范围旨在涵盖任何和所有可能的子范围及其子范围的组合,除非另有明确说明。任何列出的范围都应被视为充分描述并能够将相同的范围分解为至少相等的子部分,除非另有明确说明。如本领域技术人员将理解的,范围包括每个单独的成员和/或在适当的情况下单独的成员的一部分。
33.如本文所用,术语“约”、“大约”和/或“大致”在与(多个)所述值和/或(多个)几何结构或(多个)关系结合使用时旨在传达如此定义的值或特性名义上是所述值或描述的特性。在一些情况下,术语“约”、“大约”和/或“大致”通常可以表示和/或通常可以考虑在期望公差(例如,所述值或特性的正负10%)内所述的值或特性。例如,约0.01的值可以包括0.009和0.011,约0.5的值可以包括0.45和0.55,约10的值可以包括9到11,并且约100的值
可以包括90到110。类似地,当表面标称平行时,第一表面可以被描述为与第二表面大致平行。尽管所述值、结构和/或关系可能是期望的,但应当理解,由于例如制造公差或其他实际考虑(例如通过装置、导管、管腔等的一部分施加的压力或力)可能会出现一些变化。因此,本文中可以使用术语“约”、“大约”和/或“大致”来解释这样的公差和/或考虑。
34.如本文所用,术语“组”可以指代多个特征或具有多个部分的单个特征。例如,当提及一组壁时,该组壁可以被认为是具有多个部分的一个壁,或者该组壁可以被认为是多个不同的壁。因此,整体构造的项目可以包括一组壁。这样的一组壁可以包括彼此连续或不连续的多个部分。一组壁也可以由多个项目制造,所述项目独立生产并随后联结在一起(例如,通过焊接、粘合剂或任何合适的方法)。
35.本文描述的实施例涉及用于调节垫料,更具体地,家禽垫料的系统和/或机器。如本文所用,术语“家禽”通常指家养禽类,尤其是那些因其肉和/或蛋而受到重视的家禽,例如鸡、火鸡、鸭、鹅和/或类似家禽。术语“垫料”通常是指家禽排泄物、饲料、羽毛、灰尘、沙子、土壤和/或垫底材料,如木屑、锯末、花生壳、稻壳、甘蔗丝、稻草和/或其他相对干燥、吸收性和/或低成本的有机材料。
36.本文描述的任何实施例、装置和/或机器可以是至少半自动和/或至少半自主系统。如本文所用,术语“自动”可以指代基本上独立于用户的影响和/或控制执行功能、过程、任务等的机器(例如,硬件、软件和/或它们的组合)。例如,可以响应于预定和/或预期输入来触发或“切换”自动开关(例如,灯开关响应于视野内的运动而自动打开灯,而无需人手动操作灯开关)。
37.类似地,“自主”通常指代能够感测其环境和/或在没有人工输入的情况下响应任何给定输入以其他方式操作的机器(例如,硬件、软件和/或它们的组合)。在该上下文中,可以根据其程度或级别来指代自主。例如,“半自主”机器可以配置成基于预定输入执行预定操作和/或过程。作为示例,诸如本文所述的任何垫料调节器的机器可以是“自动驱动的”或以其他方式配置成基于许多输入或分析结果(例如从相机接收的图像、位置、速度和/或加速度数据的分析)转向和移动机器而没有人工干预。作为另一示例,诸如本文所述的任何垫料调节器的机器可以完全自主地配置成在没有人工干预的情况下执行其所有或基本上所有期望的任务。这种机器可以包括许多传感器、编码器、相机和/或任何其他数据捕获装置,所述数据捕获装置配置成捕获与机器的至少一部分的功能或状态相关联的数据,所述数据可以被分析以确定机器将执行的一个或多个未来操作。
38.本文描述的实施例可以包括任何合适的反馈控制装置、机构、方案和/或类似物,其配置成允许机器和/或机器的一部分至少半自主地操作。如本文所用,术语“反馈”、“反馈系统”和/或“反馈回路”涉及其中过去或现在的特性影响当前或未来动作的系统。例如,恒温器被称为反馈系统,其中恒温器的状态(例如,处于“开启”配置或“关闭”配置)取决于反馈到恒温器的温度。反馈系统可以包括控制方案,例如比例-积分-微分(pid)控制器。进一步扩展,一些反馈系统的输出可以用比例项、积分项和微分项之和在数学上描述。pid控制器通常在一个或多个电子装置中实施。在这样的控制器中,可以主动“调整”比例项、积分项和/或微分项以改变反馈系统的特性。
39.电子装置通常实施反馈系统以主动控制机器的运动学,以便实现和/或保持期望的系统状态。例如,可以实施反馈系统以通过改变运动学和/或一个或多个部件相对于包括
在系统中的任何其他部件的位置来控制系统内的力(例如,质量-弹簧系统和/或类似物)。在一些实施方式中,实施反馈系统的电子装置可以确定包括在机器中的一个或多个部件的当前和/或过去状态(例如,位置、速度、加速度、力、扭矩、张力、电功率等),并且将过去和/或当前状态值返回到例如pid控制方案。在一些情况下,电子装置可以实施任何合适的数值方法或其任何组合(例如,牛顿法、高斯消元法、欧拉法、lu分解等)。因此,基于一个或多个部件的过去和/或当前状态,电子装置和/或控制器可以主动监测、改变和/或更新机器的一个或多个部分至期望的系统状态。
40.图1是根据实施例的垫料调节载具100的示意图。垫料调节载具100(在本文中也称为“垫料调节器”或“载具”)可以是使载具100能够在动物舍、设施和/或围栏内操作的任何合适的形状、尺寸和/或配置。例如,载具100可以配置成在禽舍和/或类似物内操作。然而,在其他实施方式中,载具100可以用于任何合适的室内或室外环境中,其中需要调节包含在其中的垫料。
41.在某些实施例中,垫料调节器100可以配置成保持期望的最大操作高度(例如,从12英寸到96英寸,包括其间的所有值和子范围,例如78英寸),所述最大操作高度提供垫料调节器100的顶部和通常由相对容易燃烧和/或可熔化的塑料材料构造的禽舍的屋顶的底部之间的期望间隙,和/或能够升高以用于运输模式和/或降低以用于操作模式。在一些实施例中,调节器可以具有大于96英寸的高度。可以通过例如可以液压调节的臂来控制升高和/或降低(可以使用其他方法,例如直接液压、臂系统、气囊系统和/或类似物)。
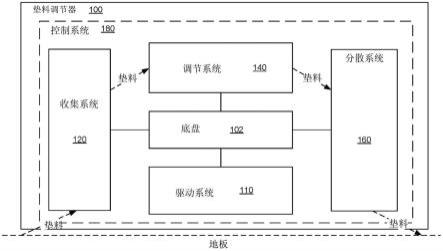
42.如图1中所示,垫料调节器100包括底盘102、驱动系统110、收集系统120、调节系统140和分散系统160。垫料调节器100还可以可选地包括控制系统180。底盘102可以是配置成支撑垫料调节器100的一个或多个部分的任何合适的结构。底盘102可以包括例如由诸如钢、铝和/或其合金的任何合适材料形成的梁、杆、管等。底盘102可以是至少部分地基于包括在垫料调节器100中的部件和/或系统的任何合适的形状和/或尺寸。在一些实施方式中,底盘102可以是相对低的轮廓,使得垫料调节器100的高度保持在预定高度(例如,与动物围栏,具体地是与禽舍相关联的净空高度)以下。
43.驱动系统110联接到底盘102并且配置成沿着地板(例如,动物围栏的地板)移动垫料调节器100。驱动系统110可以包括任何合适的部件、机器、装置和/或类似物。在一些实施方式中,例如,驱动系统110可以包括可以连接到动力源的一组轮子(例如,两个轮子、三个轮子、四个轮子、五个轮子或更多个)。例如,该组轮子(或其至少一部分)可以通过任何合适的传动装置、驱动轴和/或机械联动装置机械地连接到内燃机等。在一些实施方式中,该组轮子(或其至少一部分)可以包括一组电动马达,所述电动马达电连接到诸如电池组件、发电机等的动力源。在一些实施方式中,该组轮子中的每个轮子可以包括可以控制对应轮子的旋转的电动马达,从而允许每个轮子的独立控制。在其他实施例中,驱动系统110不需要由发动机或马达提供动力。在这样的实施例中,例如,垫料调节器100可以至少暂时地联接(例如,通过机械联动装置)到拖拉机和/或其他合适的载具,所述载具又可以操作以牵引垫料调节器100。尽管描述为包括一组轮子,但在其他实施例中,驱动系统110可以包括例如一组履带(坦克状履带)和/或用于沿着地板移动垫料调节器100的任何其他机构。
44.收集系统120联接到底盘102并且配置成当驱动系统110沿着地板移动垫料调节器100时从地板收集垫料。在一些实施例中,收集系统120可以联接到底盘102的前部分并且可
以设置在例如驱动系统110的一组前轮的前面。在一些实施方式中,该布置可以允许收集系统(或其至少一部分)升高或降低以接触从其收集垫料的地板。在其他实施例中,收集系统120和/或其至少一部分可以联接到底盘102并且至少部分地设置在驱动系统110的一组前轮的后面。
45.收集系统120可以包括可以帮助和/或以其他方式促进从地板收集和运输垫料的任何合适的部件、机器、装置、马达和/或类似物。在一些实施方式中,收集系统120可以包括铲斗、铲子、螺旋钻、连枷等。例如,铲斗或类似物可以沿着地板移动以从地板提起、铲起、撬起和/或以其他方式收集垫料。在一些实施方式中,这种铲斗可以是例如被动收集装置,其在不使用旋转和/或移动部件(例如,由马达等驱动)的情况下从地板收集垫料。
46.在一些实施例中,收集系统120可以包括使用一个或多个旋转和/或移动部件从地板收集垫料的主动收集装置。例如,收集系统120可以包括可以旋转以从地板分离、提升和/或抛掷垫料并进入收集系统120的一部分的连枷(或连枷系统)和/或螺旋钻。在一些实施方式中,连枷和/或螺旋钻可以由电动马达和/或类似物驱动和/或提供动力(例如,旋转)。在其他实施方式中,连枷和/或螺旋钻可以由垫料调节器100的动力单元驱动和/或提供动力,例如用于为驱动系统110提供动力的内燃机和/或发电机。在这样的实施方式中,垫料调节器100可以包括任何合适的齿轮装置、传动装置、联动装置、皮带、链条等,其配置成将连枷和/或螺旋钻的输入可操作地连接到动力单元(例如发动机)的输出。在其他实施方式中,可以响应于与垫料和/或地板的接触来驱动和/或以其他方式旋转连枷和/或螺旋钻。例如,可以将连枷放置成与地板的一部分接触,使得垫料调节器100的运动(例如,通过驱动系统110)导致连枷沿着地板滚动(例如,连枷被旋转)。
47.在一些实施例中,连枷可以包括许多夹板、突起、桨叶、翅片、尖齿、刷子和/或类似物,其可以接触设置在地板上的垫料以至少部分地分解垫料并将垫料拉动或移动到收集系统120的一部分中。在一些实施方式中,连枷可以配置成在连枷收集垫料时减小垫料的平均颗粒尺寸。例如,如上所述,使用过的垫料可以设计成在垫料保持水分(例如,来自动物粪便和/或任何其他来源的水分)时结块和/或聚块。可以将连枷和/或连枷的夹板等放置成与地板上的垫料接触,并且连枷的旋转可以导致夹板等将垫料分解成块和/或具有期望平均颗粒尺寸的颗粒。
48.在一些实施方式中,收集系统120可以配置成将收集的垫料引导到其内部或中心部分中和/或朝向其内部或中心部分引导。例如,铲斗、连枷、螺旋钻和/或类似物(或它们的组合)可以具有导致垫料被引导到收集系统120的中心部分(或至少铲斗、连枷、螺旋钻等的中心部分)的形状和/或配置。收集系统120还可以包括转移部分,所述转移部分可以配置成将收集的垫料转移到例如调节系统140。转移部分可以包括一个或多个传送器、滑运道、通道、轨道、路径等,从而允许转移部分提供垫料流入调节系统140,如图1中所示。在一些实施方式中,例如,转移部分可以包括带有夹板、铲斗等的传送器,以促进垫料沿着传送器前进。在一些实施例中,转移部分可以包括倾斜传送器,其具有与连枷、螺旋钻、铲斗等相邻的较低的第一端,以及与调节系统140的进料口相邻的较高的第二端。在一些实施方式中,传送器可以通过马达驱动,所述马达可以是驱动连枷和/或螺旋钻的相同马达,或者可以是不同马达。在其他实施方式中,收集系统120可以包括用于促进垫料从地板转移到调节系统140的真空源、鼓风机和/或类似物。
49.在一些实施方式中,收集系统120可以包括一个或多个传感器,所述传感器配置成感测收集系统120的至少一部分的操作状态。例如,收集系统120可以包括配置成感测连枷的操作状态(例如动力状态)、鼓风机或真空源的动力状态、连枷的旋转速度、连枷或收集系统120的一部分的位置和/或类似物的传感器。在一些实施方式中,收集系统120可以包括配置成捕获收集的垫料的图像的光学传感器、相机、扫描仪、录像机和/或类似物,所述图像可以被分析(例如,通过控制系统180)以确定例如收集的垫料的平均颗粒尺寸。
50.调节系统140沿着底盘102的一部分联接并且配置成调节由收集系统120收集的垫料。在一些实施例中,例如,调节系统140可以设置在底盘102上和/或沿着所述底盘联接,使得调节系统140的第一端部分设置在收集系统120附近或近旁,而调节系统140的第二端部分设置在分散系统160附近或近旁。
51.调节系统140可以包括任何合适的部件、机器、装置、马达和/或类似物,其可以帮助和/或以其他方式促进收集系统120收集的垫料的调节。在一些实施例中,例如,调节系统140可以包括限定内部容积的滚筒,所述内部容积配置成在其中接收垫料。在一些实施例中,滚筒可以包括和/或可以联接到进料机构,所述进料机构包括例如与收集系统120和调节系统的滚筒中的每一个连通的进料斗。在一些实施方式中,进料机构可以包括可以用于将垫料从进料斗转移到滚筒的内部容积中的螺旋钻、连枷和/或类似物。螺旋钻、连枷和/或类似物也可以配置成在垫料转移到滚筒中时减小垫料的颗粒尺寸。在一些情况下,可以调节和/或以其他方式控制螺旋钻、连枷和/或类似物以调节和/或控制转移到滚筒中的垫料的颗粒尺寸,转移到滚筒中的垫料的流量,和/或类似物。
52.滚筒可手动旋转(例如,通过曲柄等)或通过马达、发动机和/或动力单元旋转。滚筒可以包括任何合适的内部特征、表面、结构等,其配置成与设置在其中的垫料接触,使得滚筒的旋转使设置在滚筒的内部容积中的垫料翻滚。在一些实施例中,内部结构的形状和/或配置可以使得当垫料翻滚时,它沿着和/或通过滚筒从第一端部分(例如入口或进料端)流动到第二端部分(例如,出口或出料端)。
53.调节系统140还包括加热元件,所述加热元件设置在滚筒的内部容积中或设置在滚筒的外部,并且另外配置成将热能传递到滚筒的内部容积中。例如,加热元件可以是配置成释放热能的任何合适的元件。在一些实施方式中,例如,加热元件可以是燃烧器,如丙烷燃烧器。在这样的实施方式中,燃烧器能够产生期望量的热能(例如,在约1百万(m)英热单位(btu)和约10m btu之间,在约2m btu和约9m btu之间,在约3mbtu和约8m btu之间,在约4m btu和约7m btu之间,在约5m btu和约6m btu之间或约6m btu)。在一些实施例中,调节系统140可以包括燃料箱,所述燃料箱配置成向燃烧器提供燃料。例如,在一些实施例中,燃料箱可以是构造成容纳液态丙烷的燃料箱。在一些实施例中,调节系统140可以包括汽化器和/或类似物,其配置成汽化从燃料箱接收的液态丙烷并将汽化的丙烷输送到燃烧器。在一些实施方式中,包括汽化器可以允许减小燃料箱的尺寸,同时向燃烧器提供足够的汽化丙烷以实现期望的热能输出。例如,燃烧器可以配置成消耗(例如,燃烧)从燃料箱接收的汽化丙烷,其体积流量至少部分地取决于燃料箱的尺寸。然而,在一些实施方式中,包括汽化器可以允许汽化丙烷到燃烧器的体积流量大于另外由燃料箱单独产生的体积流量。因此,可以减小燃料箱的尺寸,同时仍向燃烧器提供足够的燃料以产生所需量的热能输出。
54.在一些实施方式中,加热元件可以配置成将垫料加热到与所需调节量相关联和/
或以其他方式导致所需调节量的平均温度。在一些情况下,所需调节量可以导致例如具有约170
°
f的平均温度的经调节的垫料和/或可以与其相关联。在其他情况下,经调节的垫料的所需平均温度可以小于或大于170
°
f。在一些情况下,所需调节量可以基于例如垫料的氨水平降低的量、幅度和/或百分比。例如,众所周知,家禽粪便中的氨含量相对较高,如果不处理、调节、干燥和/或更换垫料,氨会至少部分被垫料吸收,并可能对家禽造成伤害。在一些情况下,所需调节量可以是足以将垫料中和/或动物围栏的空气中的氨水平降低到预定阈值(例如,如指南所建立的和/或以其他方式确定的,低于该水平的氨水平不会伤害禽舍中的家禽和/或人类)以下的调节量。在其他情况下,所需调节量可以基于氨水平的百分比减少(例如,10%、20%、30%、40%、50%、60%、70%、80%、90%、99%和/或100%减少)。在另外的其他情况下,所需调节量可以是足以杀死包含在垫料中和/或由垫料携带的微生物、病原体和/或类似物的调节量。
55.在一些实施方式中,当垫料从滚筒的第一端部分流动(并且翻滚)到第二端部分时,可以控制和/或调整一个或多个操作状态、滚筒的旋转速度、滚筒的角度或倾斜、垫料的进料流量、由加热元件释放的热能的量和/或类似物以增加或减少垫料的停留时间。例如,在一些情况下,所需调节量可以至少部分地基于从加热元件接收的热能的量和垫料暴露于热能的时间量。加热元件的配置使得热能传递到滚筒内部容积中的气体(例如,空气和/或其他气体),因此调节量可以至少部分地基于垫料在滚筒的内部容积中的停留时间。此外,停留时间和加热元件释放的热能的量之间可能存在反比关系。因而,通过滚筒的垫料的流量和/或由加热元件释放的热能的量可以被控制和/或调整以导致对垫料的所需调节量。
56.在一些实施方式中,调节系统140可以包括配置成感测调节系统140的至少一个操作条件的许多传感器。由传感器定义的数据可以由例如控制系统180分析,进而可以确定和/或定义调节系统140的一个或多个未来状态,其将导致所需调节量。在一些情况下,未来状态可以与当前状态相同(例如,不需要改变操作状态的稳定状态)。在其他情况下,未来状态可能不同于当前状态,并且控制系统180可以向调节系统140发送一个或多个信号,所述信号指示改变调节系统140的一个或多个部分的操作条件的指令,从而将调节系统140转变到未来状态。例如,在第一种情况下,具有第一氨水平的一定量的垫料可以被转移到滚筒中并且至少部分地基于第一氨水平以第一预定停留时间和/或在第一预定温度下进行调节。在第二种情况下,具有小于第一氨水平的第二氨水平的基本上相同量的垫料可以被转移到滚筒中并以第二预定停留时间和/或在第二预定温度下调节,其中第二预定停留时间或第二预定温度中的至少一个相应地小于第一预定停留时间或第一预定温度。因而控制系统180可以控制调节系统140的一个或多个部分以提供所需量的垫料调节。
57.分散系统160在靠近和/或邻近调节系统140的输出的位置处联接到底盘102。例如,在一些实施例中,分散系统160可以联接到底盘102的后部分。分散系统160配置成接收来自调节系统140的经调节的垫料并将经调节的垫料分散到地板上(例如,在垫料调节器100后面)。分散系统160可以包括任何合适的部件、机器、装置、马达和/或类似物,其可以帮助和/或以其他方式促进经调节的垫料的分散。在一些实施例中,例如,分散系统160可以包括排气罩,其接收来自调节系统140的滚筒的输出的经调节的垫料并将经调节的垫料输送到例如一个或多个散布器、分散器和/类似物。在一些实施例中,分散系统160可以包括一个或多个旋转盘式散布器,其配置成将经过调节的垫料流散布到垫料调节器后面的地板上。
在其他实施例中,分散系统160可以包括任何合适的散布器、分散器和/或输出。
58.在一些实施例中,分散系统160可以包括配置成减少包含在经调节的垫料中的灰尘量的一个或多个部件。例如,分散系统160可以包括鼓风机和一个或多个旋风分离器,其配置成从经调节的垫料中分离灰尘。在一些实施方式中,分散系统160可以包括出口或排出口,其配置成将灰尘朝向例如垫料调节器100下方的地板引导,从而减少释放到空气中的灰尘量。在其他实施方式中,旋风分离器和/或类似物可以配置成至少暂时储存灰尘,这些灰尘可以在调节过程(例如,调节动物围栏中的所有垫料)之后被处置。
59.垫料调节器100的控制系统180可以包括可以至少部分地控制垫料调节器100的一个或多个部分的任何合适的部件、装置和/或类似物。在一些实施例中,控制系统180可以包括一个或多个传感器、电子装置(例如计算机)、控制器(例如可编程逻辑器件(pld)、可编程逻辑控制器(plc)等)和/或类似物。例如,控制系统180可以包括一个或多个电子装置,所述电子装置配置成执行包括在垫料调节器100的至少半自主控制中和/或与其相关联的一个或多个过程。电子装置可以是任何合适的基于硬件的计算装置,其配置成接收、处理、定义和/或存储数据,例如来自一个或多个传感器的数据,反馈数据,与一个或多个系统的操作状态、参数、属性等相关联的数据,历史数据和/或配置文件,包括与在给定动物围栏(例如禽舍)中操作相关联的指令、过程和/或信息,与调节效果相关联的统计数据等。在一些情况下,电子装置可以接收与垫料调节器100的一个或多个系统的当前操作状态相关联的数据。基于该数据,电子装置可以确定和/或定义一个或多个系统的未来操作状态,并且可以发送许多信号、指令、功率等,其配置成将一个或多个系统从当前操作状态转变到未来操作状态(例如,新的或更新的操作状态)。
60.下面提供了控制系统和/或电子装置和/或其部件的示例。尽管描述了某些装置和/或部件,但应理解它们仅以示例的方式呈现,而非限制。可以使用具有能够执行本文描述的过程、程序和/或方法的任何其他合适部件的任何其他合适电子装置。
61.例如,电子装置可以是移动电子装置(例如,智能手机、平板电脑、膝上型电脑和/或任何其他移动或可穿戴装置)、个人计算机(pc)、工作站、服务器装置或服务器装置的分布式网络、虚拟服务器或机器、虚拟专用服务器和/或类似物,其在物理服务器或服务器组、用户操纵的远程控制装置和/或任何其他合适的装置上作为实例或来宾执行和/或运行。在一些实施方式中,电子装置可以配置成提供一个或多个操作状态、调节结果、垫料特性、与垫料调节操作相关联的统计和/或历史数据和/或类似物的图形和/或数字表示。在一些情况下,电子装置可以配置成基于任何图形和/或数字表示的数据确定和/或以图形或数字方式呈现一个或多个计划、一个或多个模拟和/或与垫料调节过程和/或操作相关联的任何其他合适的数据。
62.电子装置的部件可以包含在单个壳体或机器内,或者可以分布在多个物理机器、虚拟机和/或它们的任何组合内和/或之间。在一些实施例中,控制系统180及其电子装置可以物理地包括在垫料调节器100中和/或上。在一些实施例中,控制系统180和/或电子装置可以被存储、运行、执行和/或以其他方式在云计算环境中实现。在一些实施例中,电子装置可以包括和/或可以由客户端装置、本地控制器和/或类似物和服务器或主机装置共同形成,它们可以通过一个或多个网络进行通信。在一些实施方式中,电子装置和/或其任何部件可以启用和/或允许垫料调节器100的主动用户控制、垫料调节器100的远程控制、垫料调
节器的半自主控制100和/或垫料调节器100的完全或基本完全自主控制。
63.包括在控制系统180中的电子装置可以至少包括存储器、处理器和通信接口。存储器、处理器和通信接口可以连接和/或电联接(例如,通过系统总线等),使得可以在存储器、处理器和通信接口之间发送电和/或电子信号。电子装置还可以包括和/或可以以其他方式可操作地联接到数据库、用户接口、输入/输出(i/o)装置和/或类似物,如本文所述的任何装置。
64.在一些实施例中,存储器可以是例如非易失性存储器、易失性存储器、寄存器、继电器、开关、存储器缓冲器、磁性介质或磁带、硬盘、软盘、光学介质或盘、光盘(cd)、数字通用磁盘(dvd)、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom)、电可擦可编程只读存储器(eeprom)、闪存、raid阵列和/或类似物,或它们的合适组合。在一些实施方式中,存储器可以物理地容纳和/或包含在电子装置中或被电子装置包含,或者可以可操作地联接到电子装置和/或至少其处理器。存储器可以例如包括在一个或多个装置中和/或分布在一个或多个装置上,例如服务器装置、基于云的计算装置、网络计算装置和/或类似物。存储器可以配置成存储例如一个或多个软件模块和/或代码,其可以包括可以使处理器执行一个或多个过程、功能和/或类似物(例如,与控制和/或操作垫料调节器100和/或类似物相关联过程、功能等)的指令。
65.存储器和/或其至少一部分可以包括和/或可以与一个或多个数据存储结构通信,例如一个或多个数据库和/或类似物。数据库可以是任何合适的数据存储结构,例如表、存储库、关系数据库、面向对象的数据库、对象关系数据库、结构化查询语言(sql)数据库、可扩展标记语言(xml)数据库和/或类似物。在一些实施例中,数据库可以设置在壳体、机架和/或至少包括存储器、处理器和/或通信接口的其他物理结构中。电子装置可以包括和/或可操作地联接到许多数据库。在一些实施方式中,数据库可以配置成存储与诸如垫料调节器100的机器的控制和/或操作相关联的数据。
66.在一些实施例中,处理器可以是利用硬件、固件和/或软件通过在形成特定物理电路的多个逻辑门上的逻辑操作来执行由机器可实现的指令集(例如,存储在存储器中)定义的给定任务的任何合适的机器。配置成运行或执行指令或代码集的处理器的示例可以包括但不限于基于硬件的集成电路、通用处理器、中央处理单元(cpu)、加速处理单元(apu)、专用集成电路(asic)、网络处理器、前端处理器、现场可编程门阵列(fpga)、可编程逻辑阵列(pla)、微处理器、微控制器和/或类似物。处理器可以通过任何合适的互连、系统总线、电路和/或类似物与存储器(和电子装置的任何其他部件)通信。处理器可以包括许多引擎、处理单元、内核等,其配置成执行与诸如垫料调节器100的机器的控制和/或操作相关联的代码、指令、模块、过程、功能等(例如,存储在存储器中)。处理器可以进一步执行代码、指令、模块、过程、功能等(例如,存储在存储器中),其与将一个或多个信号发送到远程电子装置(如移动装置)和/或从其接收一个或多个信号以允许对垫料调节器100进行远程控制和/或远程监测相关联。
67.在一些实施例中,通信接口可以是与处理器和存储器通信的任何合适的基于硬件的装置和/或存储在存储器中并由处理器执行的任何合适的软件。在一些实施方式中,通信接口可以配置成与网络和/或与网络通信的任何合适的设备进行通信。通信接口可以包括一个或多个有线和/或无线接口,例如网络接口卡(nic)、通用串行总线(usb)卡和/或任何
其他合适的通信和/或外围卡或装置。例如,在一些实施方式中,nic可以包括例如一个或多个以太网接口、光载波(oc)接口、异步传输模式(atm)接口、一个或多个无线电装置(例如无线电装置、无线电装置、近场通信(nfc)无线电装置等)和/或类似物。在一些实施方式中,通信接口可以配置成向(例如,经由一个或多个网络)垫料调节器100的任何合适部分或装置、一个或多个外围部件、用户或客户端装置(例如,智能手机、平板电脑、可穿戴电子装置、pc等)、远程控制装置和/或类似物发送数据和/或从其接收数据。
68.在一些实施方式中,网络可以是任何类型的网络,例如局域网(lan)、无线局域网(wlan)、虚拟网络如虚拟局域网(vlan)、广域网(wan)、城域网(man)、全球微波接入网络互操作性(wimax)、电话网络(例如公共交换电话网络(pstn)和/或公共陆地移动网络(plmn))、内联网、互联网、基于光纤(或光纤)的网络、蜂窝网络和/或任何其他合适的网络。此外,网络和/或其一个或多个部分可以实现为有线和/或无线网络和/或其组合。例如,网络可以包括任何类型的一个或多个网络,例如有线或无线lan和互联网。
69.在一些实施例中,用户接口可以是显示器或屏幕,例如阴极射线管(crt)监视器、液晶显示器(lcd)监视器、发光二极管(led)监视器和/或类似物。在一些情况下,显示器可以是触敏显示器等(例如,智能手机、平板电脑、可穿戴装置、pc和/或类似物的触敏显示器)。在一些情况下,显示器可以为软件应用程序(例如,移动应用程序、pc应用程序、互联网网络浏览器和/或类似物)提供用户接口,其可以允许用户操纵电子装置。在一些实施方式中,用户接口可以包括任何合适类型的人机接口装置、人计算机接口装置、批处理接口、图形用户接口(gui)等。在一些实施方式中,用户接口可以是任何其他合适的用户接口和/或输入/输出(i/o)装置,如全息显示器,可穿戴装置,如接触透镜显示器、光学头戴式显示器、虚拟现实显示器、增强现实显示器、鼠标、键盘和/或类似物,或它们的组合。因此,本文描述的电子装置可以接收、处理、定义和/或存储与诸如垫料调节器100的机器的控制和/或操作相关联的数据。此外,电子装置可以呈现(例如,在其显示器上)与垫料调节器100相关联的定性和/或定量数据和/或垫料调节过程的特性或有效性。
70.图2-13示出了根据实施例的至少半自主垫料调节器200。图2是至少半自主垫料调节器200(在本文中也称为“垫料调节器”)的侧视图,并且示出了垫料调节器200可以包括具有方向盘、驾驶员座椅和/或用于控制垫料调节器200的操作的控制器281的驾驶室203。在某些实施例中,垫料调节器200可以由一个或多个其他载具(例如,拖拉机牵引的)拉动和/或推动。在某些实施例中,可以远程、自动、半自主和/或完全自主地控制垫料调节器200的任何系统或甚至整个垫料调节器200。例如,这种完全自主的实施例不需要包括图2中所示的驾驶室203。
71.图2示出了垫料调节器200,其至少包括收集系统220、调节系统240和分散系统260。图3-6是示出收集系统220的一个或多个部分的各种视图。收集系统220可以包括可以将垫料从地板提起的板、铲斗和/或犁223。在某些实施例中,垫料收集系统220可以包括配置成降低到地板和/或有效地拾取和/或转移垫料和/或减小颗粒尺寸的螺旋钻部件。图3示出了处于延伸和/或操作位置的板、铲斗和/或犁223(本文称为“铲斗”),并且图4示出了处于缩回位置的铲斗223,缩回位置可以更好地定位用于例如在禽舍外时运输垫料调节器200。换言之,收集系统220可以在其中收集系统220可以从地板收集垫料的第一状态和/或配置和其中收集系统220不从地板收集垫料的第二状态和/或配置之间转变。
72.图4示出了垫料调节器200可以包括自调平系统225。在某些实施例中,自调平系统可以用于将延伸通过调节系统240的一部分的纵向轴线保持在特定操作范围内,例如通过锁定前轴或后轴的位置和/或自动调整其他轴。垫料调节器200可以包括控制系统,所述控制系统具有任何合适的部件以操作自调平系统225。在一些实施方式中,操作者可以设置垫料调节器200的期望操作水平(例如,高度、角度、取向等),然后当垫料调节器200行进穿过不平坦的表面时,它可以自动自调平以保持例如调节系统240的一部分的纵向轴线例如相对于水平面的设定/期望角度。该调平可以帮助确保垫料在调节系统240中保持一致的停留时间量。用于确保所需停留/出口温度组合的替代方法可以包括仅调节和/或以其他方式自调平调节系统240。
73.图5是收集系统220的侧视图,示出了铲斗223、连枷222、横向传送器227和滑板221。滑板221可以机械地支撑和/或分散铲斗223、连枷222和/或横向传送器227的重量和/或可以限制或基本防止铲斗223挖入地板。
74.图6是收集系统220的一部分的前视图并且图7是侧视图,示出了连枷222。一旦垫料沿铲斗223提升到足够的距离,连枷222可以帮助分解垫料和/或可以将垫料进一步沿铲斗223抛掷和/或抛掷到横向传送器227(或任何其他转移系统)上,所述横向传送器可以将垫料引导至提升系统或传送器226(参见图1)。辅助垫料到横向传送器227和/或其他转移系统上的其他选择可以包括拖链系统、传送系统、螺旋钻系统、桨叶系统等。其他系统可以有效地分解较大的颗粒,例如翻滚、螺旋钻动和/或搅拌等。
75.图6示出了连枷222的前视图。连枷222可以包括安装到连枷222的轴或中心部分的许多径向延伸夹板224。在一些实施方式中,夹板223可以沿着连枷222的轴或中心部分以螺旋状纵向布置,如图7中所示。可以配置成减小颗粒尺寸的其他系统可以包括利用螺旋钻动、敲打、搅拌、翻滚等的系统。
76.图8和9示出了调节系统240的部分。在某些实施方式中,提升系统可以从收集系统220转移垫料并且可以将垫料落入进料斗或机构245中,所述进料斗或机构可以将垫料进给到螺旋钻系统246,然后所述螺旋钻系统可以将垫料输送到旋转滚筒241中。可以翻滚内容物的任何滚筒式装置都可以是有效的。例如,滚筒241可以是已被修改用于调节垫料的谷物烘烤式滚筒。可以如何修改滚筒241的示例是减少叶片的数量、扩大叶片以容纳更多的垫料和/或去除叶片的部段,这可以帮助导致额外的垫料循环和/或更有效的热交换。去除叶片的部段还可以增加在被去除部段的区域中的滚筒241中的垫料翻滚量,这可以导致更有效的热交换和/或允许减小滚筒241的长度。图12示出了设置在滚筒241中的叶片243的示例,但其他配置也是可能的。
77.图10和11分别是分散系统260的一部分的俯视图和后视图。当经调节的垫料离开旋转滚筒241时,它可以进入护罩和/或料斗252,其将垫料落到一个或多个转盘式散布器262上,所述转盘式散布器配置成将垫料从垫料调节器200的后部散布并返回到禽舍的地板上。转盘式散布器262可以包括许多夹板263和/或类似物,其可以帮助将经调节的垫料散布和/或抛掷到地板上。
78.图12和13还示出了灰尘收集系统250,所述灰尘收集系统可以包括鼓风机255和管道系统252,其可以配置用于从滚筒241提取排气和/或垫料灰尘并将其排放到护罩和/或朝向禽舍的地板排放。图12是垫料调节器200的后视图并且示出了燃料箱206,所述燃料箱可
以配置成在装配在垫料调节器200的期望横截面轮廓内(例如,保持在预定高度以下和/或允许足够的空间用于垫料调节器200的其他部件)时基本上最大化其燃料容纳能力。图12进一步示出了设置在滚筒241中并配置成在垫料在滚筒241中翻滚时调节(例如,热处理)垫料的加热元件或燃烧器248。图13示出了动力生成系统204,其可以包括用于为垫料调节器200提供机械和/或电力的发动机和/或转换器和/或发电机。
79.垫料调节器可以包括和/或利用以上参考垫料调节器100(图1)和/或垫料调节器200(图2-13)描述的任何部件、特征、系统和/或类似物或其组合。各种选择、配置和/或实施例是可能的,并且以下提供某些实施例的非限制性示例。尽管下面可以参考某些实施例提供具体示例,但是应当理解,具有如此描述的特征的任何组合的其他实施例也是可能的。
80.在某些实施例中,垫料调节器可以利用大致圆柱形、大致水平延伸的旋转滚筒,所述滚筒具有附接至滚筒的内圆周的一个或多个螺旋叶片和/或其尺寸确定成保持待调节的特定数量的垫料。滚筒可以由任何合适的材料构造,包括铜、钢、涂层钢、镀锌钢和/或不锈钢。在滚筒的一端可以安装进料器和/或进料机构(例如,螺旋钻、传送器、拖链、滑槽和/或配置成将垫料输送到滚筒的装置等),其配置成将垫料输送到滚筒中。安装在滚筒中的可以是热源和/或元件(例如,加热元件248),例如燃烧器、蒸汽喷射器、加热器和/或气体入口,热源配置成向垫料施加热。热源的位置、任何火焰大小、火焰温度、火焰取向、滚筒直径、垫料进料速率和/或滚筒旋转速度可以确保垫料在其在滚筒内的时间期间得到适当调节。滚筒可以是绝缘的(例如,用岩棉包裹)和/或夹套(即,用另一层不锈钢、镀锌、金属板或任何形式的不燃层覆盖)以显著降低和/或最小化通过滚筒的外周边的热传递,从而有助于使调节器在室内使用时安全和/或更节能。
81.在某些实施例中,垫料收集系统可以从地板收集垫料并将其进给到调节器中。这样的收集/进给可以以许多方式进行,包括使用铲、犁、抓、扫、传送、螺旋钻动、真空抽吸/气动等中的任何一种。例如,调节器可以包括铲斗,所述铲斗可以配置成降低到地板以用于从禽舍地板刮取/收集垫料。铲斗的下边缘可以具有安装在下方的滑道,所述滑道配置成确保铲斗在地板表面上滑动和/或不会切入地板。该铲斗的上端可以安装在横向传送器和/或转移系统的前侧。沿着该铲斗安装在大约中间的可以是垫料连枷系统(“连枷”),其可以设计用于细化垫料,分解任何较大的颗粒,以确保一旦垫料进入滚筒,热量分布基本均匀,等等。连枷系统可以由带有突出夹板的螺旋排的轴构成。连枷系统可以以大约30rpm至大约400rpm(包括其间的所有值和子范围)操作。在其他实施例中,连枷系统可以以低于30rpm或高于400rpm操作。在一些实施方式中,垫料调节器可以基于垫料中的团块或块状物的大小和/或密度可变地调节rpm。每个夹板可以具有预定的间隙(例如,大约1/4英寸)。可以有效调节高达几英寸的颗粒,但为了获得更一致的结果,可以通过铲斗减小此类颗粒的尺寸以增加颗粒/团块分解。连枷系统可以作为一种工具交叉使用,也可以将垫料抛掷到横向转移系统上和/或消除倾斜铲斗上的垫料堆积。在一些实施方式中,例如,连枷系统可以将垫料抛掷、铲起和/或引导到横向传送器和/或转移系统而基本上不旋转。
82.在某些实施例中,横向传送器和/或其他转移系统可以是固定的和/或安装在滚筒下方。横向传送器可以配置成使用杯形橡胶带进行操作。其他设计选择可以包括犁系统、真空系统、金属拖链系统和/或螺旋钻系统等。横向转移系统可以将垫料从板输送到提升系统,所述提升系统将垫料运输到料斗和/或滚筒进料系统。提升系统可以用于沿着斜坡向上
运输垫料和/或可以是利用杯形金属和/或塑料传送夹板的传送式系统。其他设计选择可以包括真空系统、铲斗系统、金属拖链系统和/或螺旋钻系统,包括可以从地板收集垫料并将垫料输送到滚筒等中的任何形式的系统。
83.在某些实施例中,一旦垫料落入滚筒前部的进料斗和/或机构,颗粒进料系统,例如螺旋钻系统、拖链系统、桨叶系统等,可以以基本一致的方式将垫料输送到滚筒中以进行热处理。在某些实施方式中,进料系统(例如,螺旋钻)可以以和/或用任何合适的速度旋转,从而产生所需的进料流量、颗粒尺寸等。进料系统和/或机构可以位于料斗的底部,这可以帮助细化和/或分解垫料以帮助确保颗粒尺寸在所需的操作参数范围内。当螺旋钻用于进料系统时,其部件和/或与螺旋钻槽边缘的间隙可以配置成增强团块和/或颗粒分解,例如确保例如大约0.20英寸至大约1.0英寸的最大颗粒尺寸和/或平均最大颗粒尺寸,包括其间的所有值和子范围。在其他实施方式中,颗粒尺寸可以小于0.20英寸(例如,小于0.15英寸、0.10英寸或更小)或大于1.0英寸(例如,高达1.5英寸、2.0英寸、2.5英寸、3.0英寸、3.5英寸、4.0英寸或更大)。尽管提供了颗粒尺寸的示例,但应当理解,颗粒尺寸仅作为示例而不是限制性的方式呈现。尽管能够调节具有任何合适颗粒尺寸的垫料,但可以通过改善颗粒尺寸的均匀性和/或以更小的平均颗粒尺寸来改善热传递效率。包括减小颗粒尺寸的这样一种进料系统使得垫料的颗粒尺寸在收集期间减小第一量和/或减小到第一平均颗粒尺寸(例如,通过连枷),然后在进料期间减小第二量和/或减小到第二平均颗粒尺寸(例如,通过诸如螺旋钻等的进料系统)。
84.在某些实施例中,滚筒停留时间可以是足以调节垫料的任何合适的时间量。在一些实施方式中,调节可以与例如垫料中和/或屋舍或围栏中的空气中的氨(有时称为铵氮、硝酸盐氮和/或有机氮)水平的降低相关联和/或通过其测量。在一些实施方式中,经调节的垫料可以具有例如大约百万分之0.0(ppm)至大约40.0ppm之间,大约5.0ppm至大约25.0ppm之间,和/或任何其他合适范围的氨水平,包括其间的所有值和子范围。在一些实施方式中,调节可以与氨水平的百分比降低相关联和/或以其他方式测量。例如,在一些实施方式中,调节垫料可以导致氨水平降低大约10%至氨水平降低大约100%之间,氨水平降低大约50%至氨水平降低大约100%之间,和/或任何其他合适的范围,包括其间的所有值和子范围。在一些情况下,可以使用标准管或纸测试试剂盒和/或电子装置测量和/或确认氨水平。
85.在一些实施方式中,调节可以与例如在调节期间被杀死的垫料中的病原体的期望部分相关联和/或由其测量。例如,在一些实施方式中,调节可以杀死垫料中大约75%至大约100%的病原体,包括其间的所有值和子范围。在一些实施方式中,调节量可以至少部分地基于垫料在调节系统(例如,滚筒)中的停留时间。在一些实施方式中,停留时间的范围可以为大约20秒至大约300秒(包括其间的所有值和子范围)。垫料可以在旋转滚筒中翻滚,有点像衣服在干衣机中翻滚,和/或可以沿着滚筒的长度朝向加热元件(例如由燃烧器产生的明火和/或任何其他合适的加热元件)前进。当垫料被加热并开始干燥时,它会发出蒸汽,这可以有助于将热从一个垫料颗粒传递到一个或多个其他垫料颗粒,而不必将垫料烧灼、炭化、燃烧和/或变成灰烬。
86.在某些实施例中,在滚筒的端部处可以是排气收集罩系统,其可以配置成收集废热,同时潜在地允许经调节的垫料落下和/或被输送到护罩的底部之外。可以将鼓风机安装在调节器上以从护罩和/或通过(可选)灰尘收集系统(例如旋风式集尘器)和/或通过管道
系统吸引排气,将排气向下吹和/或吹到地板上,使得排气不会对禽舍天花板和/或调节器顶部的任何东西造成热损害。护罩和/或旋风分离器可以以它们不突出超过调节器的期望轮廓的方式配置。
87.在某些实施例中,垫料分散系统可能以类似于垫料被拾取之前的图案、放置和/或地形的方式可以将垫料散布到调节器后面的地板上。可以通过将垫料分散系统安装在排气罩下方来实现所需和/或预定的分散模式,使得当垫料落下和/或从罩底部排出时,它可以落到两个相对旋转的圆盘上,直立的小夹板可以将垫料均匀地散布/抛掷到调节器后面的地板上。垫料散布的宽度可以通过这些圆盘的变速调整来控制。实现垫料的该分散和/或散布的其他方法可以包括横向螺旋钻动、犁、拖动和/或传送器。
88.在某些实施例中,可以位于例如滚筒的出口点处、滚筒内部和/或排气罩和/或排气系统中的一个或多个温度传感器可以测量排气温度和/或离开的经调节的垫料温度和/或将该信息提供给调节器的控制系统。温度管理可以控制垫料流量,因此可能不需要监测垫料流量本身。传感器可以位于进料螺旋钻处以确保垫料一致地进给到滚筒中和/或可以监测颗粒尺寸(例如,光学和/或视觉监测)、速度和/或流量。系统可以设计成如果这些温度中的一个温度超过设定点和/或如果垫料和/或适量的垫料不再进给到滚筒中则自动停止燃料、空气、燃烧器、滚筒、螺旋钻和/或调节器的任何部分和/或系统。备用温度传感器可以用于确保主传感器的故障不会产生危险和/或安全问题。
89.在某些实施例中,调节器的控制系统可以安装在任何期望的位置,例如调节器的前部和/或允许操作者容易接近的任何位置。控制系统可以以数字方式向操作者显示对于确保垫料被加热到正确温度和/或垫料以合适的流量移动和/或安全参数在规范内是必要的和/或有帮助的信息。控制系统的用户接口可以具有用于紧急关闭丙烷燃料、燃烧器和/或整台机器任何部分的按钮。控制系统可以监测进入和/或离开的垫料温度和/或流量和/或自动进行调整以加快或减慢将垫料引入和/或离开滚筒的速率,从而保持所需的垫料出口温度。可以通过增加和/或减小串联和/或并联的进料系统、滚筒、横向转移系统和/或提升系统的操作速度来进行自动调整。
90.在某些实施例中,调节器可以配置成保持期望的最大操作高度(例如,从12英寸到96英寸,包括其间的所有值和子范围,例如78英寸),所述最大操作高度提供所述调节器的顶部和禽舍的屋顶的底部之间的期望间隙(该屋顶通常由相对容易燃烧和/或可熔化的塑料材料构造),和/或能够升高以用于运输模式和/或降低以用于操作模式。在一些实施例中,调节器可以具有大于96英寸的高度。前轴和/或后轴可构建成升高和降低。可以通过例如可以液压调节的臂来控制升高和/或降低(可以使用其他方法来实现可调节的悬架,例如直接液压、臂系统和/或气囊系统)。
91.在某些实施例中,调节器可以使用定制的丙烷(或其他燃料)储罐,其可以提供足够的丙烷供给,同时保持调节器的紧密轮廓。储罐可以配置成围绕滚筒,例如四分之一圈,同时相对紧密地贴靠在侧面和/或顶部轮廓的外部界限上。附加的绝缘层和/或隔热罩可以用于缓冲来自滚筒的热和/或保护丙烷罐。
92.在某些实施例中,由于调节器可以是自供电的和/或独立的,因此它可以配备动力单元,所述动力单元可以包括内燃机和/或任何其他动力源,其配置成为液压泵和/或电动转换器和/或发电机的轴提供动力。动力单元可以适当地尺寸确定成为可以安装在滚筒的
与丙烷燃料储罐相对的一侧的液压泵和/或发电机提供动力。
93.在某些实施例中,调节器可以是“自供电的”和/或“独立的”和/或不需要外力、操纵、控制和/或指令来操作。调节器的驱动轮胎可以通过来自动力单元的液压泵的液压和/或电气系统进行电动和/或静液压驱动。可以使用其他方法来为驱动轮提供动力,例如由液压泵提供动力的链条驱动系统和/或具有驱动轴型系统的传动装置等。驾驶室、方向盘和/或操作仪表板/控制面板可以安装在空调的前部和/或后部。操作者的驾驶室和/或座椅可以策略性地定位以最大化操作者的视角,同时保持操作者的安全和/或舒适度。该单元不需要有本地操作者,而是可以远程操作和/或监测。该单元可以行使任何程度的自主,包括不需要人工监督。
94.在某些实施例中,为了调节垫料(例如,使每个垫料颗粒的内部达到特定温度并将其保持特定时间量),可以使用替代的加热形式。例如,根据调节器的大小/规模,可以使用电加热器代替燃烧器。替代地,调节器可以产生蒸汽(而不是燃烧气体和/或加热的空气)并将其施加到垫料。作为另一种替代选择,发动机/发电机产生的热可以施加到垫料(例如,作为再生加热的形式,使用排气等)以提供和/或增加所需的加热。如果使用燃烧,它可以由任何类型的燃料作为燃料,包括丙烷、天然气、汽油、柴油、煤油、燃料油、植物油、木屑、丸粒和/或碎片等。可以通过垫料本身和/或任何其他有机原料和/或产品为燃烧提供燃料(或补充)。
95.类似地,在某些实施例中,推进调节器和/或产生用于调节器的电力和/或液压动力的机械动力可以由完全和/或部分由任何兼容的燃料来源(例如丙烷、天然气、汽油、柴油、煤油、燃料油、植物油等)提供燃料的内燃机和/或动力源提供。替代地,电池、转换器和/或燃料电池可以提供电力以驱动调节器的任何系统,包括其推进、收集、提升、传送、加热、分散和/或控制系统等。
96.在某些实施例中,调节器可以按尺寸缩放,从而潜在地产生、改变、简化和/或消除对其一个或多个系统的需要。例如,根据其尺寸,调节器可能不需要抑尘系统和/或可能能够真空提升、犁、铲或链式拖离地板上的垫料。在某些实施例中,调节器可以足够小和/或向前移动足够慢,以使其可以安全地通过禽舍,同时避免在禽群/生长周期期间(而不是之前和/或之后)伤害任何家禽,从而经常、定期和/或连续调节垫料。
97.在某些实施例中,调节器的各种系统中的任何一个可以以可变速度操作和/或可以自动调整。例如,收集系统可以在可变速度下操作,所述速度例如由希望引入滚筒的垫料的流量、调节器的前进/地面速度、地板上的垫料深度和/或连枷系统速度确定。作为另一示例,对于存在更多和/或更大团块的谷仓/农场,可以增加连枷系统的旋转速度。作为另一示例,滚筒的旋转速度可以变化以实现期望的垫料出口温度。
98.在某些实施例中,自调平系统可以用于将滚筒的纵向轴线保持在特定操作范围内,例如通过锁定前轴或后轴的位置和/或自动调整其他轴。控制系统可以操作自调平系统。操作者可以为调节器设置所需的操作水平,然后当调节器穿过不平坦的表面时,它可以自动自调平以保持滚筒的纵向轴线例如相对于水平面的设定/所需角度。该调平可以有助于确保垫料在滚筒中保持一致的停留时间。确保所需停留/出口温度组合的替代方法可以包括仅对滚筒进行自调平和/或调整滚筒速度。
99.在某些实施例中,不是试图通过载具调平系统(例如,以上参考图4描述)保持滚筒
水平,而是可以根据需要调整滚筒旋转速度和/或热供给(例如,燃烧器火焰配置和/或燃烧器的燃料流量)以实现和/或保持离开的垫料颗粒的指定平均停留时间和/或内部温度,而与滚筒的调平程度无关。通常,如果降低温度,可以增加停留时间以实现所需调节量(例如,所需的氨减少量和/或病原体消除程度)。类似地,如果温度升高,可以减小停留时间以实现相同水平和/或量的调节(例如,相同水平和/或量的氨减少和/或病原体消除)。
100.某些实施例可以采用任何重量/体积进料器、筒仓和/或其他储存容器、干燥器/冷却器、混合器/掺合机、筛分机、破碎机/研磨机、包装机和/或其他散装加工设备。这样的设备可以促进垫料的收集、垫料颗粒尺寸的减小、未调节和/或经调节的垫料的运输和/或临时储存、经调节的垫料的分散和/或散布等。
101.图14-29示出了根据实施例的垫料调节载具300。垫料调节载具300(在本文中也称为“垫料调节器”或“载具”)可以是使载具300能够在动物舍、设施和/或围栏内操作的任何合适的形状、尺寸和/或配置。例如,载具300可以配置成在禽舍和/或类似物内操作。然而,在其他实施方式中,载具300可以用于任何合适的室内或室外环境中,其中需要调节包含在其中的垫料。在某些实施例中,垫料调节器300可以配置成保持期望的最大操作高度(例如,从12英寸到96英寸,包括其间的所有值和子范围,例如78英寸),所述最大操作高度提供垫料调节器300的顶部和通常由相对容易燃烧和/或可熔化的塑料材料构造的禽舍的屋顶的底部之间的期望间隙,和/或能够升高以用于运输模式和/或降低以用于操作模式。在一些实施例中,垫料调节器300可以具有大于96英寸的高度。可以通过例如可以液压调节的臂来控制升高和/或降低(可以使用其他方法,例如直接液压、臂系统、气囊系统和/或类似物)。
102.尽管未示出,但垫料调节器300还可以包括控制系统,所述控制系统可以包括任何合适的部件、装置和/或类似物,例如一个或多个传感器、电子装置(例如计算机)、控制器(例如pld、plc等)、存储器、处理器、通信接口、用户接口和/或类似物。控制系统可以配置成执行和/或运行包括在垫料调节器300的至少半自主控制中和/或与其相关联的一个或多个过程。在一些实施例中,控制系统可以与上面参考图1描述的控制系统180类似和/或基本相同。因此,控制系统和/或部件或其方面可能不会在本文中更详细地描述。
103.如图14-19所示,垫料调节器300包括底盘302、驱动系统310、收集系统320、调节系统340和分散系统360。底盘302可以是配置成支撑垫料调节器300的一个或多个部分的任何合适的结构。底盘302可以包括例如由诸如钢、铝和/或其合金的任何合适材料形成的梁、杆、管等。底盘302可以是至少部分地基于包括在垫料调节器300中的部件和/或系统的任何合适的形状和/或尺寸。在一些实施方式中,底盘302可以是相对低的轮廓,使得垫料调节器300的高度保持在预定高度(例如,与动物围栏,具体地是与禽舍相关联的净空高度)以下。在一些实施例中,垫料调节器300可以包括舱室和/或操作者区域303,人类用户可以坐或站在其中并控制垫料调节器300的一个或多个部分。尽管未示出,舱室和/或操作者区域303可以包括任何合适的用户接口、控制机构、计算机和/或包括在例如垫料调节器300的控制系统中的部件,从而允许操作者至少部分地控制和/或操作垫料调节器300。尽管包括舱室和/或操作者区域303,但是垫料调节器300可以例如在基本上自主的模式下配置和/或操作,操作者不出现在舱室和/或操作者区域303中。
104.驱动系统310联接到底盘302并且配置成沿着地板(例如,动物围栏的地板)移动垫料调节器300。驱动系统310可以包括任何合适的部件、机器、装置和/或类似物。在一些实施
方式中,例如,驱动系统310可以包括可操作地连接到动力源304的一组轮子305(例如,两个轮子、三个轮子、四个轮子、五个轮子或更多个)。例如,在图14-29所示的实施例中,该组轮子305(或其至少一部分)可以通过任何合适的传动装置、驱动轴和/或机械联动装置机械地连接到内燃机等(例如,动力源304)。驱动系统310还可以包括任何合适的悬架、联动装置、转向机构和/或类似物,其配置成允许垫料调节器300的控制和/或转向。尽管未示出,但是驱动系统310可以包括许多传感器、致动器、编码器、计量器和/或类似物,其配置成感测和/或检测驱动系统310的一个或多个操作状态。在一些实施方式中,传感器、致动器、编码器、计量器、相机和/或类似物可以使垫料调节器300的控制系统能够以半自主或基本上完全自主的方式控制驱动系统310。
105.动力源304可以提供导致该组轮子305的至少一部分旋转的输出。例如,在一些实施例中,驱动系统310可以配置为前轮驱动载具、后轮驱动载具和/或全轮驱动载具。如本文进一步详细描述,垫料调节器300包括燃料箱306,所述燃料箱包含由调节系统340用来调节垫料的燃料。在一些实施方式中,动力源304可以是配置成使用燃料箱306中包含的燃料的至少一部分的内燃机。在一些实施方式中,例如,燃料箱306可以包含诸如液体丙烷的燃料和/或任何其他合适的可燃物,并且动力源304可以配置和/或适于燃烧和/或以其他方式使用包含在燃料箱306中的燃料。在其他实施方式中,电源304可以配置和/或适于燃烧和/或以其他方式使用存储在独立燃料箱(例如,独立于燃料箱306)中的燃料,例如汽油。
106.图20-23是垫料调节器300的收集系统320的各种视图。收集系统320联接到底盘302的前部分并且配置成当驱动系统310沿着地板移动垫料调节器300时从地板收集垫料。在该实施例中,收集系统320联接到底盘302的前部分并且在驱动系统310的一组前轮305的前面。在一些实施方式中,该布置可以允许收集系统320(或其至少一部分)被升高或降低以接触从其收集垫料的地板。
107.收集系统320可以包括可以帮助和/或以其他方式促进从地板收集和运输垫料的任何合适的部件、机器、装置、马达和/或类似物,例如铲斗、铲子、螺旋钻、连枷等。在该实施例中,收集系统320包括主动收集装置,其使用一个或多个旋转和/或移动部件从地板收集垫料。具体地,收集系统320包括连枷322(和/或螺旋钻)和传送机构326。
108.在一些实施方式中,连枷322可以是和/或可以包括设置在护罩324等中和/或至少部分地由所述护罩等容纳的旋转构件。连枷322可以是任何合适的装置,其可以被旋转以从地板分离、提升和/或抛掷垫料并进入传送机构326的一部分。在一些实施方式中,连枷322可以由电动马达和/或类似物驱动和/或提供动力(例如,旋转)。在其他实施方式中,连枷322可以由垫料调节器300的动力单元304驱动和/或提供动力。在这样的实施方式中,垫料调节器300可以包括任何合适的齿轮装置、传动装置、联动装置、皮带、链条等,其配置成将连枷322的输入可操作地连接到动力单元304的输出。在其他实施方式中,可以响应于与垫料和/或地板的接触来驱动和/或以其他方式旋转连枷322。例如,可以将连枷322放置成与地板的一部分接触,使得垫料调节器300的运动(例如,通过驱动系统310)导致连枷322沿着地板滚动(例如,连枷322被旋转)。在一些实施方式中,可以在其中例如通过动力单元304为连枷322提供动力的动力模式下或在其中连枷322与待收集的垫料接触并响应于驱动系统310沿着地板移动垫料调节器300而旋转的非动力模式下操作连枷322。
109.图20示出了包括许多夹板323的连枷322,所述夹板可以接触设置在地板上的垫料
以至少部分地分解垫料并将垫料拉动或移动到传送机构326的一部分中。例如,夹板323可以是突起、桨叶、翅片、尖齿、刷子和/或类似物。在一些实施方式中,连枷322和/或其夹板323可以配置成在连枷322收集垫料时减小垫料的平均颗粒尺寸。例如,如上所述,使用过的垫料可以在垫料保持水分(例如,来自动物粪便和/或任何其他来源的水分)时结块和/或聚块。可以将连枷322和/或夹板323放置成与地板上的垫料接触,并且连枷322的旋转可以导致夹板323嚼碎、穿透、破裂和/或以其他方式将垫料分解成块和/或具有期望平均颗粒尺寸的颗粒。在一些实施方式中,连枷322可以配置成分解垫料,使得垫料的颗粒尺寸例如小于10.0英寸、小于9.0英寸、小于8.0英寸、小于7.0英寸、小于6.0英寸、小于5.0英寸、小于4.0英寸、小于3.0英寸、小于2.0英寸和/或小于1.0英寸。在一些实施方式中,收集系统320和/或连枷322可以配置成将收集的垫料引导到其内部或中心部分中和/或朝向其内部或中心部分引导以将垫料转移到传送机构326中。例如,连枷322、夹板323和/或护罩324(或其组合)可以具有导致垫料被引导到收集系统320的中心部分(或连枷322或护罩324的至少中心部分)的形状和/或配置。
110.图21-23示出了传送机构326,其例如联接到至少部分地容纳连枷322的护罩324的一部分。传送机构326可以是和/或可以包括配置成将收集的垫料从连枷322(或护罩324)转移到例如调节系统340的任何合适的机构或装置。例如,传送机构326包括可以容纳和/或至少部分地包围传送器(未示出)的滑运道327,从而允许传送机构326提供垫料流入调节系统340,如图22的箭头aa和图23中的箭头bb所示。在一些实施方式中,例如,传送器可以包括夹板、铲斗等以促进垫料沿着传送器前进(如上文参考垫料调节器200所述)。图23将传送机构326示出为具有倾斜配置,其具有与护罩324联接和/或接触的相对较低的第一端和与调节系统340的进料口相邻的相对较高的第二端。传送机构326的第二端包括例如出口328,所述出口配置成允许垫料从滑运道327内部的体积或空间转移到滑运道327外部的体积或空间(例如,转移到调节系统340的进料机构345中)。在一些实施方式中,传送器可以通过马达驱动,所述马达可以是驱动连枷322的相同马达或可以是不同马达。在一些实施方式中,传送机构326可以包括真空源、鼓风机和/或类似物以便于通过传送机构326转移垫料。
111.在一些实施方式中,收集系统320可以包括一个或多个传感器,所述传感器配置成感测收集系统320的至少一部分的操作状态。例如,收集系统320可以包括传感器、编码器和/或类似物,其配置成感测操作状态,例如,连枷322的动力状态、传送系统326的动力状态、鼓风机或真空源的动力状态、连枷322的旋转速度、连枷322、护罩324或收集系统320的一部分的位置、通过传送机构326的流量和/或类似物。在一些实施方式中,收集系统320可以包括配置成捕获收集的垫料的图像的光学传感器、相机、扫描仪、录像机和/或类似物,所述图像可以被分析(例如,通过控制系统380)以确定例如收集的垫料的平均颗粒尺寸。此外,基于平均颗粒尺寸,收集系统的控制系统(未示出)可以配置成控制收集系统320的一个或多个操作状态以保持、增加和/或减小平均颗粒尺寸(例如、增加或减小连枷322的旋转速度、增加或减小通过传送机构326的流量、增加或减小垫料调节器300沿着地板的速度等)。
112.图23-29示出了垫料调节器的调节系统340的一个或多个部分。调节系统340沿着底盘302的一部分联接并且配置成调节由收集系统320收集的垫料。例如,调节系统340可以设置在底盘302上和/或沿着所述底盘联接,使得调节系统340的第一端部分(例如,进料端)设置在收集系统320附近或近旁,并且调节系统340的第二端部分(例如,出口端)设置在分
散系统360附近或近旁。
113.调节系统340可以包括任何合适的部件、机器、装置、马达、加热元件和/或类似物,其可以帮助和/或以其他方式促进收集系统320收集的垫料的调节。例如,调节系统340可以至少包括滚筒341、进料机构345和加热元件(未示出)。进料机构345。进料机构345与收集系统320和滚筒341中的每一个连通并且配置成在它们之间转移垫料。在一些实施方式中,进料机构345可以包括进料斗和螺旋钻。例如,进料斗与传送机构326的出口328连通以接收垫料流,如图23中的箭头bb所示。螺旋钻可以用于将垫料从进料斗转移到滚筒341的内部容积中。螺旋钻还可以配置成在垫料被转移到滚筒341中时减小垫料的平均颗粒尺寸。
114.在一些情况下,可以调节和/或以其他方式控制螺旋钻以调节和/或控制转移到滚筒中的垫料的平均颗粒尺寸、转移到滚筒中的垫料的流量和/或类似物。例如,控制系统(未示出)可以包括可以捕获进料机构345中的垫料的一个或多个图像的一个或多个传感器、相机、扫描仪等,所述图像可以被分析以确定从收集系统320接收的垫料的平均颗粒尺寸。如果控制系统确定较小的颗粒尺寸是期望的,则控制系统可以控制和/或调整例如螺旋钻的操作状态以进一步减小垫料的平均颗粒尺寸。在其他实施方式中,控制系统可以配置成控制和/或调整螺旋钻的操作状态以控制进入滚筒341的垫料的流量(例如,进一步减小或不进一步减小垫料的平均颗粒尺寸)。
115.图24-26示出了调节系统340的滚筒341。滚筒341限定配置成在其中接收垫料的内部容积342。滚筒341可通过马达、发动机和/或类似物旋转。例如,在一些实施例中,滚筒341可以可操作地联接到动力单元304的输出并且响应动力单元304的输出的旋转而旋转。在其他实施例中,滚筒341可以联接到单独的和/或独立的马达。滚筒341可以包括任何合适的内部特征、表面、结构等,其配置成接触设置在其中的垫料,使得滚筒341的旋转使设置在滚筒341的内部容积342中的垫料翻滚。
116.例如,图27和28分别是第一叶片343和第二叶片344的透视图。在一些实施方式中,滚筒341的内部分或表面可以由一系列交替叶片343和344形成。如图26中所示,叶片343和344可以延伸到滚筒341的内部容积中,并且可以形成臂、凸缘、肋、突起和/或类似物,当滚筒341旋转时它们可以抛掷和/或翻滚垫料。尽管特别在图26-28中示出,但是在一些实施方式中,可以修改叶片343和/或344以提供与设置在滚筒341中的垫料的期望相互作用。例如,可能需要增加或减少叶片343和/或344的数量,扩大叶片343和/或344的尺寸以容纳更大量的垫料,去除叶片343和/或344的部段以促进垫料循环、有效热交换和/或垫料翻滚,等等。
117.调节系统340还包括加热元件,所述加热元件设置在滚筒341的内部容积342中或设置在滚筒341外部,并且以其他方式配置成将热能传递到内部容积342中。例如,加热元件可以是配置成释放热能的任何合适的元件。在一些实施方式中,例如,加热元件可以是燃烧器,例如丙烷燃烧器,如上面参考垫料调节器100的加热元件148所述。在一些实施例中,加热元件可以配置成接收例如来自燃料箱306的汽化燃料(例如汽化丙烷)。在一些实施例中,调节系统340可以包括汽化器356(参见例如图16、17和19)。汽化器356和/或类似物配置成汽化从燃料箱306接收的液态丙烷并将汽化的丙烷输送到加热元件,这可以允许相对高能量的加热元件,同时保持燃料箱306的尺寸低于期望的阈值尺寸,如上面参考垫料调节器100所述。
118.在一些实施方式中,加热元件可以配置成将垫料加热到与所需调节量相关联和/
或以其他方式导致所需调节量的平均温度。在一些情况下,所需调节量可以导致例如具有约170
°
f的平均温度的经调节的垫料和/或可以与其相关联。在一些情况下,经调节的垫料的所需平均温度可以小于170
°
f。在一些情况下,经调节的垫料的所需平均温度可以至少为170
°
f。在一些情况下,经调节的垫料的所需平均温度可以大于170
°
f。
119.在一些情况下,所需调节量可以基于例如垫料的氨水平降低的量、幅度和/或百分比。例如,众所周知,家禽粪便中的氨含量相对较高,如果不处理、调节、干燥和/或更换垫料,氨会至少部分被垫料吸收,并可能对家禽造成伤害。在一些情况下,所需调节量可以是足以将垫料中和/或动物围栏的空气中的氨水平降低到预定阈值(例如,如指南所建立的和/或以其他方式确定的,低于该水平的氨水平不会伤害禽舍中的家禽和/或人类)以下的调节量。在其他情况下,所需调节量可以基于氨水平的百分比减少(例如,30%、20%、30%、40%、50%、60%、70%、80%、90%、99%和/或300%减少)。在另外的其他情况下,所需调节量可以是足以杀死包含在垫料中和/或由垫料携带的微生物、病原体和/或类似物的调节量。
120.在一些实施方式中,当垫料从滚筒341的第一端部分流动(并且翻滚)到第二端部分时,可以控制和/或调整调节系统340的一个或多个操作状态、滚筒341的旋转速度、滚筒341的角度或倾斜、垫料从进料机构345进入滚筒341的进料流量、由加热元件释放的热能的量和/或类似物以增加或减少垫料的停留时间。例如,在一些情况下,所需调节量可以至少部分地基于从加热元件接收的热能的量和垫料暴露于热能的时间量。加热元件的配置使得热能传递到滚筒341的内部容积342中的气体(例如,空气和/或其他气体),因此调节量可以至少部分地基于垫料在滚筒341的内部容积342中的停留时间。此外,停留时间和加热元件释放的热能的量之间可能存在反比关系。因而,通过滚筒341的垫料的流量和/或由加热元件释放的热能的量可以被控制和/或调整以导致对垫料的所需调节量。
121.在一些实施方式中,调节系统340可以包括配置成感测调节系统340的至少一个操作条件的许多传感器。由传感器定义的数据可以由例如控制系统分析,进而可以确定和/或定义调节系统340的一个或多个未来状态,其将导致所需调节量。在一些情况下,未来状态可以与当前状态相同(例如,不需要改变操作状态的稳定状态)。在其他情况下,未来状态可能不同于当前状态,并且控制系统可以向调节系统340发送一个或多个信号,所述信号指示改变调节系统340的一个或多个部分的操作条件的指令,从而将调节系统340转变到未来状态。例如,在第一种情况下,具有第一氨水平的一定量的垫料可以被转移到滚筒341中并且至少部分地基于第一氨水平以第一预定停留时间和/或在第一预定温度下进行调节。在第二种情况下,具有小于第一氨水平的第二氨水平的基本上相同量的垫料可以被转移到滚筒341中并以第二预定停留时间和/或在第二预定温度下调节,其中第二预定停留时间或第二预定温度中的至少一个相应地小于第一预定停留时间或第一预定温度。因而控制系统可以控制调节系统340的一个或多个部分以提供所需量的垫料调节。
122.图29示出了垫料调节器300的分散系统360。分散系统360在靠近和/或邻近调节系统340的输出的位置(例如,在底盘302的后端或部分处)联接到底盘302。分散系统360配置成接收来自调节系统340的经调节的垫料并将经调节的垫料分散到地板上(例如,在垫料调节器300后面)。分散系统360可以包括任何合适的部件、机器、装置、马达和/或类似物,其可以帮助和/或以其他方式促进经调节的垫料的分散。
123.例如,分散系统360可以包括鼓风机350(图14和15)、排气罩352、散布器362、分离器354和排气歧管355。在一些实施方式中,鼓风机350、分离器354和排气歧管355可以配置成从经调节的垫料分离灰尘,从而减少释放到动物围栏(例如,禽舍)的空气中的灰尘量。在一些实施方式中,排气歧管355可以配置成提供出口或排气口,其配置成将灰尘引向例如垫料调节器300下方的地板。在其他实施方式中,分离器354可以配置成至少暂时地储存灰尘,这些灰尘可以在调节过程(例如,调节动物围栏中的所有垫料)之后被处置。在一些实施例中,分离器354可以是例如旋风分离器,其接收来自鼓风机350的空气流并且基于例如颗粒的密度将灰尘从经调节的垫料分离。以该方式,灰尘颗粒可以被转移到排气歧管355中并朝向地面被引导(或另外至少暂时储存),并且经调节的垫料的颗粒可以被转移到排气罩352中以便通过散布器362分散。
124.散布器362可以是任何合适的装置和/或机构,其配置成将经调节的垫料散布到地板上。在一些实施例中,例如,散布器362可以是转盘散布器362,其配置成将经调节的垫料流散布到垫料调节器后面的地板上。在其他实施例中,分散系统360可以包括任何合适的散布器、分散器和/或输出。
125.在一些实施方式中,分散系统360可以包括许多传感器,所述传感器配置成感测分散系统360的至少一个操作条件。由传感器定义的数据可以通过例如控制系统进行分析,进而可以确定和/或定义将由分散系统360执行的一个或多个操作。例如,在一些情况下,一个或多个传感器可以配置成感测提供给散布器362的经调节的垫料的流量。例如,如果流量低于预定阈值,则控制系统可以确定分离器354已满而不按要求分离、来自鼓风机的空气速度或流量太低、通过调节系统340的垫料的流量低于期望阈值、垫料调节器沿地板的速度太快和/或类似情况。相反,如果流量高于预定阈值,则可能希望降低通过调节系统340的垫料的流量以确保散布器362能够以期望的方式分散或散布经调节的垫料。
126.如上所述,垫料调节器300的控制系统可以配置成至少部分地控制垫料调节器300的驱动系统310、收集系统320、调节系统340和/或分散系统360以提供和/或执行垫料调节器300的至少半自主操作。因此,垫料调节器300可以用于在诸如禽舍的动物围栏内收集用过的、结块的、聚块的和/或饱和的垫料,更新和/或调节用过的垫料(例如,通过至少热处理过程),并将经调节的垫料分散回到动物围栏的地板上。
127.图30是示出根据实施例的使用至少半自主垫料调节载具的方法10的流程图。垫料调节载具(本文也称为“垫料调节器”)可以与本文所述的垫料调节器100、200和/或300中的任一个相似或基本相同。例如,在一些实施例中,垫料调节器可以至少包括收集系统、调节系统和分散系统。在一些情况下,垫料调节器的使用可以包括由人类操作者对垫料调节器的至少部分控制。在其他情况下,垫料调节器的使用可以包括人工操作者对垫料调节器的远程控制。在另外的其他情况下,垫料调节器的使用可以包括对垫料调节器的自主控制,基本上无需人工干预和/或输入。
128.在一些实施方式中,在11处,方法10包括当垫料调节载具沿着动物围栏的地板移动时从地板收集垫料。例如,垫料调节器可以包括驱动系统,所述驱动系统可以配置成沿着地板移动垫料调节器,如上文参考垫料调节器100、200和/或300所述。在一些实施方式中,垫料调节器可以至少暂时联接到可以沿着地板牵引或拉动垫料调节器的拖拉机或其他载具。在一些实施例中,当垫料处理机沿着地板移动时,垫料调节器的收集系统从地板收集垫
料。
129.在12处,减小收集的垫料的平均颗粒尺寸。例如,在一些实施例中,收集系统包括连枷等,当收集垫料时所述连枷可以分解垫料的团块、块和/或块状物。平均颗粒尺寸可以是任何合适的尺寸,如上文参考垫料调节器100、200和/或300所述。在一些实施方式中,收集系统可以将收集的垫料提供到进料机构中,所述进料机构进而可以配置成进一步减小收集的垫料的平均颗粒尺寸,如上文参考垫料调节器300所述。
130.在13处,将垫料提供到包括在垫料调节器的调节系统中的滚筒的内部容积中。例如,进料机构可以包括可以接收来自收集系统的垫料流的进料斗。在一些实施方式中,进料机构的螺旋钻可以配置成将垫料流提供到滚筒的内部容积中。如上所述,在一些实施方式中,螺旋钻可以在将垫料提供到滚筒的内部容积中之前进一步减小垫料的平均颗粒尺寸。在其他实施方式中,螺旋钻不需要进一步减小平均颗粒尺寸。在一些实施方式中,收集系统和/或调节系统的进料机构可以被控制以控制和/或调整进入滚筒的内部容积的垫料的流量以确保其中的垫料被调节到期望的水平和/或被调节所需量。
131.在14处,旋转滚筒以使设置在滚筒的内部容积中的垫料翻滚。此外,在15处,当垫料在滚筒的内部容积中翻滚时热能从加热元件传递到垫料。换言之,当垫料在转筒的内部容积中翻滚时,设置在转筒的内部容积中的垫料被调节和/或热处理。在一些实施例中,滚筒可以包括和/或合适的内表面和/或特征,其配置成当垫料流过滚筒时促进通过滚筒的垫料流量和/或传递到垫料的热能的量,如上文参考调节系统140、240和/或340所述。在一些实施方式中,传递到垫料的热能的量可以是足以例如将垫料或动物围栏的空气内的氨水平降低到低于预定阈值氨水平的量。在一些实施方式中,传递到垫料的热能的量可以是足以杀死垫料中的微生物和/或病原体的量。在一些情况下,例如,热能的量可以是足以将垫料的平均温度升高到至少170
°
f的量。
132.在16处,在滚筒中的预定停留时间之后,经调节的垫料从滚筒提供到垫料调节器的分散系统,所述分散系统进而配置成将经调节的垫料分散在基本上在垫料调节器后面的地板的一部分上。例如,在一些实施例中,分散系统可以包括一个或多个散布器,所述散布器从滚筒的出口接收经调节的垫料流并将经调节的垫料散布在基本上在垫料调节器后面的地板上。在一些实施方式中,分散系统包括分离机构,所述分离机构配置成至少部分地从经调节的垫料分离灰尘颗粒,这可以减少释放到动物围栏的空气中的灰尘量。分离的灰尘例如可以在地板的方向上释放或者可以在调节之后至少暂时收集和/或储存和处置。
133.因此,垫料调节器300可以用于在诸如禽舍的动物围栏内收集用过的、结块的、聚块的和/或饱和的垫料,更新和/或调节用过的垫料(例如,通过至少热处理过程),并将经调节的垫料分散回到动物围栏的地板上。
134.本文描述的一些实施例涉及一种计算机存储产品,所述计算机存储产品具有在其上具有用于执行各种计算机实现的操作的指令或计算机代码的非暂时性计算机可读介质(例如,存储器或一个或多个存储器)。计算机可读介质(或处理器可读介质)在其本身不包括暂时性传播信号(例如,在诸如空间或电缆的传输介质上运载信息的传播电磁波)的意义上是非暂时性的。介质和计算机代码(也可以称为代码)可以是为特定的一个或多个目的而设计和构造的那些。非暂时性计算机可读介质的示例包括但不限于磁存储介质,例如硬盘、软盘和磁带;光学存储介质,例如光盘/数字视频光盘(cd/dvd)、光盘只读存储器(cd-rom)
和全息装置;诸如光磁盘的磁光存储介质;载波信号处理模块;以及专门配置成存储和执行程序代码的硬件装置,例如asic、rom装置、ram装置和/或可编程逻辑装置(pld)。本文描述的其他实施例涉及计算机程序产品,其可以包括例如本文讨论的指令和/或计算机代码。
135.本文描述的一些实施例和/或方法可以通过软件(在硬件上执行)、硬件或其组合来执行。硬件模块和/或部件可以包括例如通用处理器、cpu、fpga、asic和/或类似物。软件模块和/或指令(在硬件上执行)可以用多种软件语言(例如计算机代码)表达,包括c、c 、javatm、ruby、visual basictm、pythontm和/或其他面向对象、程序或其他编程语言和开发工具。计算机代码的示例包括但不限于微代码或微指令、机器指令(例如由编译器生成)、用于生成web服务的代码以及包含由使用解释器的计算机执行的高级指令的文件。例如,可以使用命令式编程语言(例如c、fortran等)、函数式编程语言(haskell、erlang等)、逻辑编程语言(例如prolog)、面向对象的编程语言(例如、java、c 等)或其他合适的编程语言和/或开发工具和/或它们的组合(例如,pythontm)。计算机代码的附加示例包括但不限于控制信号、加密代码和压缩代码。
136.本文描述的一些实施例和/或方法可以包括和/或可以由一个或多个控制系统执行,所述控制系统配置成执行和/或运行包括在垫料调节器的至少半自主控制和/或其操作中和/或与其相关联的一个或多个过程。控制系统可以包括任何合适的部件、装置和/或类似物,例如一个或多个传感器(例如,编码器、位置传感器、速度传感器、加速度传感器、接近传感器、雷达、激光雷达、光学传感器、压力传感器、温度传感器和/或任何其他合适的传感器)、电子装置(例如,计算机)、控制器(例如,pld、plc等)、存储器、处理器、通信接口、用户接口和/或类似物,如以上参考控制系统180所述。控制系统可以包括基于硬件、基于固件和/或基于软件的装置的任何合适的组合,其配置成接收、发送、处理、分析、定义和/或存储数据,例如,来自一个或多个传感器的数据、反馈数据、历史数据、概况数据、统计数据、预测数据和/或任何其他合适的数据。
137.在一些实施方式中,控制系统可以接收与垫料调节器的一个或多个系统的当前操作状态相关联的数据;可以基于数据确定和/或定义一个或多个系统的未来操作状态;并且可以发送配置成将一个或多个系统从当前操作状态转变到未来操作状态(例如,新的或更新的操作状态)的许多信号、指令、电功率等。在一些实施方式中,控制系统可以定义和/或提供与垫料调节器的一个或多个操作状态相关联的数据的图形和/或数字表示;与垫料调节器或垫料调节过程相关联的定性和/或定量结果、特性、有效性等;垫料特性和/或类型;与许多动物围栏(例如,禽舍)的垫料调节操作、计划、模拟等相关联的当前、历史、概况和/或预测数据、信息和/或报告;和/或与垫料调节器、调节过程和/或操作、动物围栏和/或类似物相关联的任何其他合适的数据。在一些实施方式中,控制系统可以配置成向远程电子装置(例如移动装置)发送一个或多个信号和/或从远程电子装置接收一个或多个信号以允许对垫料调节器进行远程控制和/或远程监测(例如,通过一个或多个网络)。因此,上述控制系统和/或其任何部件可以启用和/或允许垫料调节器的主动用户控制、垫料调节器的远程控制、垫料调节器的半自主控制和/或垫料调节器的完全或基本上完全自主控制。
138.尽管本文已经以文本和/或图形方式描述了各种实施例,但应当理解,它们仅以示例的方式而非限制的方式呈现。类似地,应当理解,本文使用的特定术语是为了描述特定实施例和/或其特征或部件的目的,而不是旨在限制。可以在不脱离本公开的范围和/或不改
变其功能和/或优点的情况下对形式和/或细节进行各种修改、改变、增强和/或变化,除非另有明确说明。除了在此列举的那些之外,功能等效的实施例、实施方式和/或方法对于本领域技术人员而言从前述描述将是显而易见的并且旨在落入本公开的范围内。
139.在上述示意图、实施例和/或实施方式指示以某些取向或位置布置和/或配置的某些部件的情况下,部件的布置可以被修改、调整、优化等。各种部件的具体尺寸和/或具体形状可以不同于所示的实施例和/或可以以其他方式修改,同时仍提供如本文所述的功能。更具体地,可以针对期望或预期用途具体选择各种部件的尺寸和形状。因此,应当理解,实施例和/或其部件的尺寸、形状和/或布置可以适用于给定用途,除非上下文另有明确说明。
140.尽管已将各种实施例描述为具有特定的特性、功能、部件、元件和/或特征,但是其他实施例可能具有来自本文描述的任何实施例的特性、功能、部件、元件和/或特征的任何组合和/或子组合,除了相互排斥的组合或除非另有明确说明。此外,除非本文另有明确说明,否则部件、功能、特征、元件等的任何特定组合都可以分离和/或分开为独立的部件、功能、特征、元件等,或者可以集成为单个或单一的部件、功能、特征、元件等。
141.在上述方法指示某些事件以某种顺序发生的情况下,可以修改某些事件的顺序。此外,如果可能,某些事件可以在并行过程中同时执行,以及如上所述顺序执行。尽管方法已被描述为具有特定步骤和/或步骤的组合,但其他方法可能具有来自本文描述的任何方法的任何步骤的组合,除了相互排斥的组合和/或除非上下文另有明确说明。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。