1.本发明涉及的是一种定位方法,具体地说是极地冰区水声定位方法。
背景技术:
2.跨冰定位是极地水声学研究的未来前沿应用方向。随着北极开发与利用越来越成为现实,探索北极具有重要意义。水声定位普遍使用水听器阵列或矢量水听器阵列等声呐设备作为水下声压接收装置。虽然北极科考多在夏季,但极地海域仍会有大面积冰层覆盖,导致诸如冰下目标定位活动无法继续开展。而常年被数米厚的冰层覆盖的北极海域,冰下环境复杂,布放条件困难。
3.这是由于极地特有的覆冰环境导致的,因此需要一种能够布放简单,实施便捷,经济高效的跨冰定位设备。除了设备布放的问题,还有水声定位方法存在极地环境适应性问题。
4.水声定位方法包括长基线定位、短基线定位和超短基线定位等。长基线定位基线长,定位精度高,布放在海底,每个基元都需要具备声发射功能,以与目标进行应答。短基线定位基线较短,定位精度次之,布放在船体,需要1-3个基元具备应答功能。超短基线最短,布放在船体,几个基元布放在一个总的水声换能器中。以上方法均需要基元具备冰层声发射和声同步功能,目前用于冰层的水声设备无法完全满足此类功能。由于极地冰层弹性固体的存在,使得弹性声波的传播特性不同于水声传播。
5.跨冰定位冰下声源作为极地应用的前沿技术之一,研究跨冰定位技术具有重大意义,然而自今仍未有兼具实用性和适应性的技术手段。
6.在最新同类技术发明专利中,《一种基于弯曲波的冰上震源定位方法》和《一种针对极地冰层的震源定位方法》提出了针对冰上或冰层声源的定位方法。在《一种跨冰层介质通信方法》、《一种跨冰层数据无线传输方法》以及《一种跨冰层介质的水深测量方法》涉及了部分跨冰层的水声通信及测冰层厚度的方法,但是如何对冰下的声源进行定位,特别是在具有数米厚冰层覆盖的极地海域实现跨域定位冰下声源,是更具有现实性的难题。
技术实现要素:
7.本发明的目的在于提供基于极地冰声传播声场的特征参数实现跨冰定位冰下声源的一种基于冰声衰减特征的跨冰定位冰下声源方法。
8.本发明的目的是这样实现的:
9.本发明一种基于冰声衰减特征的跨冰定位冰下声源方法,其特征是:
10.(1)在冰层布放加速度计,通过加速度计采集冰下声源发出的跨冰声信号;
11.(2)对跨冰信号进行滤波降噪;
12.(3)对滤波后的跨冰声信号求解rssi值;
13.(4)根据极地环境参数求解冰声耦合声场;对冰层弹性固体的navier即纳维方程和海水流体介质的helmholtz即亥姆霍兹方程进行求解,以获得跨冰声传播声场;
14.(5)根据宽带声场能量变化求解冰声衰减系数α:求解宽带声场的趋势线αr m,该趋势线的斜率α即为估计的冰声衰减系数;
15.(6)解算冰下声源坐标。
16.本发明还可以包括:
17.1、步骤(6)中的解算冰下声源坐标具体包括:
18.a、在已知引导信号情况下,通过
19.r=(rssi
ref-rssi)/α r
ref
20.求解声源到每个加速度计的距离;
21.联合加速度计坐标和求解距离建立冰下声源坐标方程组
[0022][0023]
求解声源坐标式中ri表示第i个加速度计到声源的距离,表示第i个加速度计的坐标向量,表示待求声源的坐标;
[0024]
b、在已知声源强度情况下,通过
[0025]
r=(a-rssi)/α
[0026]
求解声源到每个加速度计的距离;并联合加速度计坐标和求解距离建立冰下声源坐标方程组
[0027][0028]
求解声源坐标
[0029]
c、在未知声源强度或引导信号的情况下,任意两个加速度计到冰下声源的距离差为
[0030]
δr=δrssi/α
[0031]
联合加速度计坐标和求解距离差建立冰下声源坐标方程组
[0032][0033]
求解声源坐标式中r
ij
表示第i个加速度计到声源的距离与第j个加速度计到声源的距离之差。
[0034]
2、步骤(4)中所述跨冰声传播声场是考虑冰层采用海冰海水耦合声传播方法求解
声场。
[0035]
本发明的优势在于:本发明开创性的提出的通过冰上加速度计采集冰下合作或非合作声学目标信号的三种跨冰定位方法,能有效的跨冰定位冰下声源位置,实现了跨冰定位这一开创性的应用。
附图说明
[0036]
图1为本发明的跨冰定位示意图;
[0037]
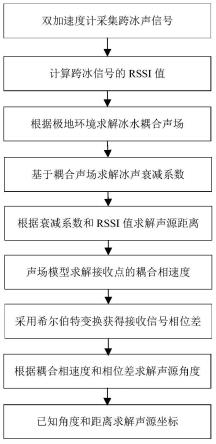
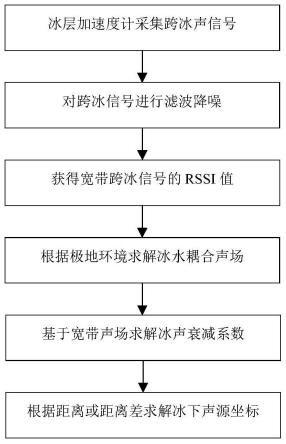
图2是本发明的流程图;
[0038]
图3是本发明中的外场实测与模型理论计算的单频与宽带冰水耦合声场;
[0039]
图4是本发明中的合作目标跨冰定位实验圆形交汇图;
[0040]
图5是本发明中的合作目标跨冰定位冰下声源x坐标和y坐标直方图;
[0041]
图6是本发明中的非合作目标跨冰定位实验双曲线交汇图;
[0042]
图7是本发明中的非合作目标跨冰定位冰下声源x坐标和y坐标直方图。
具体实施方式
[0043]
下面结合附图举例对本发明做更详细地描述:
[0044]
结合图1-7,将加速度计或检波器布放在冰层上,接收冰下声源发出的跨冰声信号。声源激发的水下声波打到冰层,通过冰层传播到达冰上并被接收,相比于在冰下布放水听器具有操作简单、基元坐标精确可控的优势。
[0045]
信号发射能量和接收能量之间的关系可表示为
[0046]
pr=μ(r)p
t
/rn[0047]
式中p
t
表示声源发射能量,pr表示接收能量,r表示声源与基元之间的距离,n为传播因子,μ(r)表示环境对信号的波动影响,忽略波动部分并取对数得
[0048]
10nlgr=10lgp
t
/pr[0049]
接收信号强度指示rssi为
[0050]
rssi=a-10nlgr
[0051]
式中,a表示声源强度。接收信号强度指示rssi是无线电传感器领域定位的关键参数之一。根据研究表明,对于极地跨冰定位来说,rssi值的这一定义并不能直接应用在极地定位中。
[0052]
海冰冰层的存在使得对声波具有吸收效应,冰层对声波的吸声衰减不可忽略。声波随距离衰减的关系表示为
[0053]
ir=i0e-2σr
[0054]
式中i0表示声源声强,ir表示冰层加速度计接收声强,σ为声波振幅衰减系数。
[0055]
对于极地跨冰定位,本发明定义了适用于极地定位领域的接收信号强度指示rssi定义为
[0056]
rssi=a-αr
[0057]
式中α=8.69σ。
[0058]
通过改变rssi值的常规定义,使其适应了极地定位的应用场景。冰下声源距离表示为
[0059]
r=(a-rssi)/α
[0060]
未知发射功率时,通过一个已知距离r
ref
的引导信号间接求解冰下声源距离
[0061]
r=(rssi
ref-rssi)/α r
ref
[0062]
式中rssi
ref
为加速度计接收的来自引导信号强度,实现跨冰测距。
[0063]
本发明采用求解rssi值计算声源距离的优势在于,避免了现有极地冰层设备的声发射和同步问题,不需要考虑声波跨冰传播时间和声源距离之间的复杂多途关系,通过rssi值,计算获得了冰下声源到冰上加速度计的距离,具有实用性。
[0064]
在冰上布放加速度计或检波器阵列后,对于合作目标可根据以上两种情况的测距结果,并结合加速度计坐标,基于圆形交汇求解冰下声源的绝对坐标。
[0065]
对于非合作目标(声源强度未知或引导信号强度未知),任意两个加速度计到冰下声源的距离差与rssi值之差满足
[0066]
δr=δrssi/α
[0067]
联合加速度计坐标和求解距离差,基于双曲线交汇求解冰下声源坐标。
[0068]
通过以上方法完成了对跨冰定位这一开创性的应用。
[0069]
以下为本发明的一个应用实例:
[0070]
步骤1通过布放在冰层的加速度计采集冰下声源发出的跨冰声信号;相比于在冰下或海底布放基线,这一步骤具有布放简单、实施便捷、经济高效、基元坐标精确校准、作业安全性高的优势。
[0071]
步骤2由于极地背景噪声和脉冲干扰较大,对跨冰信号进行滤波降噪;
[0072]
步骤3对滤波后的跨冰声信号求解rssi值;本发明采用求解rssi值计算声源距离的优势在于,避免了现有极地冰层设备的声发射和同步问题,不需要考虑声波跨冰传播时间和声源距离之间的复杂多途关系,后续步骤通过rssi值,计算获得了冰下声源到冰上加速度计的距离,具有实用性。
[0073]
步骤4根据极地环境参数求解冰声耦合声场;对冰层弹性固体的navier(纳维)方程和海水流体介质的helmholtz(亥姆霍兹)方程进行求解,以获得跨冰声传播声场,这里并不是传统的水声简正波方法,而是考虑冰层采用海冰海水耦合声传播方法求解声场;
[0074]
步骤5根据宽带声场能量变化求解冰声衰减系数α,采用最小二乘法拟合估计;
[0075]
如图3所示,采用冰声传播简正波方法根据极地环境参数求解跨冰声传播声场,左图为窄带声场,右图为宽带声场。图中圆点为加速度计接收的跨冰声信号的基于步骤3计算的rssi值,图中实线绘制了步骤4的基于简正波方法,并根据冰声物理参数求解的冰水耦合宽带声场,虚线为步骤5的基于最小二乘法求解的趋势线αr m,该趋势线的斜率α即为估计的冰声衰减系数,窄带估计值为0.051db/m,与实际声场差别较大,宽带估计值约为0.063db/m,与实际声场吻合。理论计算声场与实测声场的对比如表1所示;
[0076]
表1理论冰水耦合声场与实测值
[0077][0078]
步骤6解算冰下声源坐标。进一步,所述步骤6包括:
[0079]
6.1:在已知引导信号(合作目标)情况下,通过
[0080]
r=(rssi
ref-rssi)/α r
ref
[0081]
求解声源到每个加速度计的距离,结果如表2所示,测距误差均值为28.641m。
[0082]
表2冰下声源与加速度计组的估计距离
[0083][0084]
联合加速度计坐标和求解距离建立冰下声源坐标方程组
[0085][0086]
求解声源坐标式中ri表示第i个加速度计到声源的距离,表示第i个加速度计的坐标向量,表示待求声源的坐标;
[0087]
如图4所示,为根据步骤6.1中声源到加速度计的距离方程组所绘制的圆形交汇图,黑点表示位于原点的冰下声源,圆点表示加速度计的坐标组,如表3所示,对应了每个方程圆的圆心,其半径为冰下声源到对应加速度计的估计距离r。
[0088]
表3加速度计相对于原点声源的相对坐标
[0089][0090]
如图5所示,根据直方图估计结果为x=10.432m,y=48.948m。
[0091]
6.2:在已知声源强度情况下(合作目标),通过
[0092]
r=(a-rssi)/α
[0093]
求解声源到每个加速度计的距离;并联合加速度计坐标和求解距离建立冰下声源坐标方程组
[0094][0095]
求解声源坐标
[0096]
6.3:在未知声源强度或引导信号(非合作目标)的情况下,任意两个加速度计到冰下声源的距离差为
[0097]
δr=δrssi/α
[0098]
联合加速度计坐标和求解距离差建立冰下声源坐标方程组
[0099][0100]
求解声源坐标式中r
ij
表示第i个加速度计到声源的距离与第j个加速度计到声源的距离之差。如图6所示,为根据步骤6.3中声源到加速度计的距离之差方程组所绘制的双曲线交汇图,黑点表示位于原点的冰下声源,圆点表示加速度计的坐标组,对应了双曲线的焦点。如图7所示,根据直方图估计结果为x=-34.688m,y=2.782m。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。