1.本发明属于水声定位技术领域,具体涉及一种基于双加速度计耦合相速特征的跨冰定位方法。
背景技术:
2.跨冰定位作为北极未来应用的前沿方向,随着北极开发与利用越来越成为现实,探索北极并开发具有实用性新颖性的跨冰定位方法具有重大意义。
3.声波作为水下可远距离传输的唯一媒介,可进行远距离的通信、定位和导航,使得声学方法及声学设备成为最佳方式。一般的声学定位使用水听器阵列或矢量水听器阵列等声呐设备作为水下声压接收装置采集声信号。虽然北极科考多在夏季,但极地海域仍会有大面积冰层覆盖,导致活动无法继续开展。
4.常年被数米厚冰层覆盖的北极,冰下环境复杂,布放条件困难。因此需要一种能够布放简单,实施便捷,经济高效,具有开创性的跨冰定位方法。常规的水声学定位方法包括长基线、短基线和超短基线定位。
5.长基线定位方法具有基线长,分辨能力强,定位精度高的特点,待测目标与每个基元通信,获得声传播时间差,继而利用距离球面交汇法实现定位。因此每个基线单元需要具备应答功能,但是应答器只在水下环境实现声学应答功能,对于北极数米厚的冰层,目前设备无法在冰层中进行同步应答。
6.短基线定位方法和长基线相比,基线短,往往固定在船舶等航行器上,易受船舶噪声干扰,但是仅需要一个基元发出声波,其他基元同步接收待测目标的应答。在极地冰层覆盖环境,基元应答功能仍然受冰层制约。
7.超短基线的基线最短,利用基元间的相位差实现定位,和长基线、短基线定位方法相比,不需要基元具有发射声波功能,因此可以利用加速度计或者冰层检波器构建超短基线。由于水下声波跨越冰层,基元间的相位差不同于无冰环境,需要通过冰水耦合模型进行求解。
8.水下声源激发声波打到冰层,通过冰层传播到达冰上,由加速度计接收跨冰信号,相比于在冰下布放具有较大的优势。
技术实现要素:
9.本发明的目的在于提供一种基于双加速度计耦合相速特征的跨冰定位方法。
10.一种基于双加速度计耦合相速特征的跨冰定位方法,包括以下步骤:
11.步骤1:获取冰层下方声源的深度zs,将两个同步加速度计布放在冰层上,采集冰层下方声源发出的跨冰声信号;
12.步骤2:计算跨冰声信号强度rssi值;
13.rssi≡10lgir14.其中,ir为两个同步加速度计接收到的信号的声强;
15.步骤3:获取接收信号的频谱g(r,z)与相位差
16.步骤4:基于最小二乘法求解g(r,z)的趋势线,将趋势线的斜率α作为冰声衰减系数;
17.步骤5:计算声源相对于两个加速度计中心点的距离r;
18.若已知声源的声强i0,则r=(10lgi
0-rssi)/α;
19.若已知引导信号,则r=(rssi
ref-rssi)/α r
ref
;rssi
ref
为两个同步加速度计接收到的引导信号的强度;r
ref
为引导信号的距离;
20.步骤6:计算耦合相速度c(r);
[0021][0022][0023]
其中,ω为接收信号的角频率;为声源发射信号的初相位常数;
[0024]
步骤7:计算声源相对于两加速度计中心点的方位角θ;
[0025][0026]
其中,d为两加速度计之间的距离;
[0027]
步骤8:解算声源的平面坐标(x,y),结合已知的声源深度zs,完成对于冰层下方声源的定位;
[0028]
x=r cosθ
[0029]
y=r sinθ。
[0030]
进一步地,所述步骤3中接收信号的频谱g(r,z)具体为:
[0031][0032]
其中,z表示深度;s
t
表示声源发射幅度;k为海水的体积模量;a
1n
(z)和a
2n
(z)分别为冰水耦合声场的第n阶切向位移和法向位移的简正波模态幅度;a
2n,z
(z)表示对a
2n
(z)计算关于z的导数;kn为第n阶模态的水平波数。
[0033]
进一步地,所述步骤3中接收信号的频谱g(r,z)的获取方法为:对冰层弹性固体的navier方程和海水流体介质的helmholtz方程进行求解,获得跨冰声传播声场;假设声源发出的声波为简谐信号,据冰声简正波传播理论,得到如步骤3所示的接收信号的频谱g(r,z)表达式。
[0034]
进一步地,所述步骤1中在冰层上布放的两个同步加速度计之间的间隔需要小于接收信号的半个波长。
[0035]
进一步地,所述步骤2中若已知引导信号,ir由两个同步加速度计采集的电压信号方差计算。
[0036]
进一步地,所述步骤3中接收信号的相位差采用希尔伯特变换获得。
[0037]
本发明的有益效果在于:
[0038]
本发明中两个同步加速度计布放在冰层上采集冰下声源发出的跨冰声信号,相比于在冰下布放水听器具有操作简单、基元坐标精确可控的优势;本发明采用求解rssi值计算声源距离,避免了现有极地冰层设备的声发射和同步问题,不需要考虑声波跨冰传播时间和声源距离之间的复杂多途关系。本发明通过利用双加速度计耦合相速实现了极地跨冰定位的创新性应用。
附图说明
[0039]
图1是本发明中的跨冰定位示意图。
[0040]
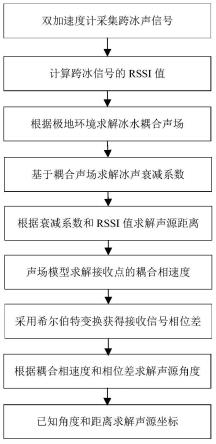
图2是本发明的总体流程图。
[0041]
图3是本发明的实施例中rssi值、接收信号的频谱g(r,z)、趋势线αr m的示意图。
[0042]
图4是本发明的实施例中估计的冰下声源距离与实际对比图。
[0043]
图5是本发明的实施例中耦合相速度随距离和频率的变化关系图。
[0044]
图6是本发明的实施例中四种cw脉冲信号的相位差示意图。
[0045]
图7是本发明的实施例中四种cw脉冲信号估计的声源角度示意图。
[0046]
图8是本发明的实施例中理论冰水耦合声场与实测值的对比数据表。
[0047]
图9是本发明的实施例中冰下声源实际距离与估计距离的对比数据表。
[0048]
图10是本发明的实施例中cw信号在不同距离处的耦合相速度的数据表。
具体实施方式
[0049]
下面结合附图对本发明做进一步描述。
[0050]
水下声源激发声波打到冰层,通过冰层传播到达冰上,由加速度计接收跨冰信号,相比于在冰下布放具有较大的优势。
[0051]
本发明提出了一种基于双加速度计耦合相速特征的跨冰定位方法,在覆盖数米厚冰层的北极海域,将两个同步加速度计布放在冰层上,以采集冰下声源发出的跨冰声信号。声源激发的水下声波打到冰层,通过冰层传播到达冰上并被接收,相比于在冰下布放水听器具有操作简单、基元坐标精确可控的优势。
[0052]
假设声源发出的声波为简谐信号,冰层环境会改变声源信号的幅度和相位,这种改变机制是水声波导的传播特性所决定的,改变程度取决于声源位置以及海洋环境参数。根据冰声简正波传播理论,接收信号的频域表达式近似为:
[0053][0054]
其中,g(r,z)表示接收信号的频谱,r为声源相对于两个加速度计中心点的距离,zs为声源深度,z为深度,加速度计布放在冰面上,其实际值设置为0;s
t
表示声源发射幅度,为声源发射信号的初相位常数,k为海水的体积模量,右下角标“,”表示求导运算,a
1n
和a
2n
分别为冰水耦合声场的第n阶切向位移和法向位移的简正波模态幅度,kn为第n阶模态的水平波数。
[0055]
根据接收能量与距离的关系,求解声源到加速度计的距离。声能量的主要变化趋势为:
[0056]
pr=μ(r)p
t
/rn[0057]
式中,pr表示接收信号的能量,p
t
表示声源发射能量,n为传播因子,μ(r)表示gr能量的波动,忽略波动部分并取对数得:
[0058]
10n lg r=10lg p
t
/pr[0059]
接收信号强度指示rssi为:
[0060]
rssi=a-10n lg r
[0061]
式中,a表示声源强度。
[0062]
这也是无线电传感器领域定位的关键参数,根据研究表明,对于极地跨冰定位来说,rssi值的这一定义并不能直接应用。海冰冰层的存在使得对声波具有吸收效应,冰层对声波的吸声衰减不可忽略。声波随距离衰减的关系表示为:
[0063]
ir=i0e-2σr
[0064]
式中,i0表示声源声强,ir表示冰层加速度计接收声强,σ为声波振幅衰减系数。
[0065]
对于极地跨冰定位,有接收信号强度指示rssi定义为:
[0066]
rssi≡10lg ir=a-αr
[0067]
式中,α=8.69σ。
[0068]
通过改变rssi值的定义,使其适应了极地定位的应用场景,用于解算冰下声源距离:
[0069]
r=(a-rssi)/α
[0070]
未知发射功率时,通过一个已知距离r
ref
的引导信号间接求解冰下声源距离:
[0071]
r=(rssi
ref-rssi)/α r
ref
[0072]
式中,rssi
ref
为加速度计接收的来自引导信号强度,实现跨冰测距。
[0073]
本发明采用求解rssi值计算声源距离的优势在于,不需要考虑声波跨冰传播时间和声源距离之间的复杂多途关系,通过rssi值,计算获得了冰下声源到冰上加速度计的距离,具有实用性。
[0074]
根据两加速度计相位与声源方位的关系,求解声源的来波方位。接收信号的相位表示为
[0075][0076]
式中,∠为取相位符,r(g)和i(g)分别表示接收信号的实部和虚部。本发明定义了一种与声源距离密切相关的特征参数,即耦合相速c(r):
[0077][0078]
通过定义耦合相速,可以求解声源相对于两加速度计的方位:
[0079][0080]
式中,θ为声源来波方向,d为两加速度计或两子阵的间隔,为两加速度计同步信号之间的相位差。
[0081]
综上所述,本发明联合rssi方法估计的目标距离r,以及两加速度计相位差估计的
目标方位θ,解算目标坐标x=r cosθ和y=r sinθ,通过坐标转换得到冰下声源的绝对坐标。本发明通过利用双加速度计耦合相速实现了极地跨冰定位的创新性应用。本发明的具体实施步骤为:
[0082]
步骤1:获取冰层下方声源的深度zs,将两个同步加速度计布放在冰层上,采集冰层下方声源发出的跨冰声信号;
[0083]
步骤2:计算跨冰声信号强度rssi值;
[0084]
rssi≡10lg ir[0085]
其中,ir为两个同步加速度计接收到的信号的声强;
[0086]
步骤3:获取接收信号的频谱g(r,z)与相位差
[0087]
步骤4:基于最小二乘法求解g(r,z)的趋势线,将趋势线的斜率α作为冰声衰减系数;
[0088]
步骤5:计算声源相对于两个加速度计中心点的距离r;
[0089]
若已知声源的声强i0,则r=(10lg i
0-rssi)/α;
[0090]
若已知引导信号,则r=(rssi
ref-rssi)/α r
ref
;rssi
ref
为两个同步加速度计接收到的引导信号的强度;r
ref
为引导信号的距离;
[0091]
步骤6:计算耦合相速度c(r);
[0092][0093][0094]
其中,ω为接收信号的角频率;为声源发射信号的初相位常数;
[0095]
步骤7:计算声源相对于两加速度计中心点的方位角θ;
[0096][0097]
其中,d为两加速度计之间的距离;
[0098]
步骤8:解算声源的平面坐标(x,y),结合已知的声源深度zs,完成对于冰层下方声源的定位;
[0099]
x=r cosθ
[0100]
y=r sinθ。
[0101]
实施例1:
[0102]
如图1所示,本发明的应用场景为跨冰定位,通过在冰层布放双加速度计等接收基元,采集冰下声源发出的跨冰声信号,用于跨冰定位;
[0103]
如图2所示,本发明包括以下步骤:
[0104]
步骤1:通过布放在冰层的加速度计采集冰下声源发出的跨冰声信号;相比于在冰下或海底布放基线,这一步骤具有布放简单、实施便捷、经济高效、基元坐标精确校准、作业安全性高的优势。与检波器相比,加速度计具有接收频带宽,可成阵列提高抗噪声性能。在外场江冰实验中,两个同步加速度计之间的距离为0.1m,间隔一般要求小于半个波长。冰下声源在距离加速度计50m到350m的范围内,发射4种cw脉冲信号,频率分别为750hz、800hz、
850hz和900hz,脉冲宽度0.1s,加速度计采样频率为40000hz。
[0105]
步骤2:计算跨冰声信号rssi值,有rssi≡10lg ir,式中ir表示接收信号声强,对于已知引导信号情况下,ir简化表示为加速度计采集的电压信号方差。
[0106]
步骤3:根据极地环境参数求解冰声耦合声场;对冰层弹性固体的navier(纳维)方程和海水流体介质的helmholtz(亥姆霍兹)方程进行求解,以获得跨冰声传播声场,根据冰声简正波传播理论,接收信号的频域表达式近似为:
[0107][0108]
式中,g(r,z)表示接收信号的频谱,r为声源相对于两个加速度计中心点距离,zs为声源深度,z为加速度计的深度,加速度计布放在冰面上,其实际值设置为0,s
t
表示声源发射幅度,为声源发射信号的初相位常数,k为海水的体积模量,右下角标“,”表示求导运算,a
1n
和a
2n
分别为冰水耦合声场的第n阶切向位移和法向位移的简正波模态幅度,kn为第n阶模态的水平波数。
[0109]
步骤4:根据跨冰声传播声场的能量变化求解冰声衰减系数α,采用最小二乘法拟合估计值;
[0110]
如图3所示,图中圆点为加速度计接收的跨冰声信号的基于步骤2计算的cw跨冰声信号的rssi值,图中实线绘制了步骤3基于简正波方法,并根据冰声物理参数求解的冰水耦合宽带声场,虚线为步骤4的基于最小二乘法求解的趋势线αr m,该趋势线的斜率α即为估计的冰声衰减系数,估计值约为0.063db/m,与实际声场吻合。理论计算声场与实测声场的对比如图8所示;
[0111]
步骤5:通过rssi值,计算获得冰下声源到冰上加速度计的距离。进一步,所述步骤5包括:
[0112]
在已知引导信号情况下,r=(rssi
ref-rssi)/α r
ref
;
[0113]
式中,rssi
ref
为加速度计接收的引导信号强度,r
ref
为引导信号的距离;
[0114]
在已知声源级情况下,r=(10lg i
0-rssi)/α;
[0115]
式中,i0表示声源的声强。
[0116]
如图4所示,白条带为通过步骤5估计的冰下声源距离,黑条带为待测声源的实际位置,结果如图9所示,测距误差均值为28.641m。
[0117]
本发明采用求解rssi值计算声源距离的优势在于,避免了现有极地冰层设备的声发射和同步问题,不需要考虑声波跨冰传播时间和声源距离之间的复杂多途关系;
[0118]
步骤6:根据声场模型求解加速度计所在距离处的耦合相速度。本发明定义了一种与声源距离密切相关的特征参数,即耦合相速度c(r):
[0119][0120]
式中,相位∠为取相位符,g(r,z)是根据冰水耦合声传播模型求解的加速度计在距离冰下声源为r处声场,r(g)和i
(g)分别表示接收信号g(r)的实部和虚部。
[0121]
如图10所示,为四种频率在8个距离点的耦合相速度。
[0122]
如图5所示,耦合相速度随距离和频率的变化关系图。四种频率的cw脉冲信号的耦合相速度随着距离的增加而逐渐减小。主要原因在于,冰层的声吸收效应要大于海水,随着距离的增加,冰层中高相速度模态衰减的会更快,使得冰层中更接近海水低相速度的模态占主要成分。
[0123]
步骤7:采用希尔伯特变换获得接收信号相位差,如图6所示,两加速度计接收的150处声源cw脉冲信号的相位差,750-900hz的相位差均值分别为18.76
°
,13.88
°
,13.50
°
,19.63
°
。
[0124]
步骤8:通过定义耦合相速度,可以求解声源相对于两加速度计的方位,根据耦合相速度和相位差求解声源角度。声源相对于两加速度计的方位表示为
[0125][0126]
式中,ω为接收信号的角频率,θ为声源来波方向,d为两加速度计或两子阵的间隔,为两加速度计同步信号之间的相位差。除了采用850hz估计的声源角度为30
°
左右,离声源实际方位40
°
相差近10
°
,其他三个cw脉冲,750hz、800hz和900hz信号估计的声源角度大约在40
°
,与实际方位是一致的。
[0127]
步骤9:联合步骤5采用rssi方法估计的目标距离r,以及步骤8基于双加速度计相位差估计的目标方位θ,解算处目标坐标x=r cosθ和y=r sinθ,通过坐标转换得到冰下声源的绝对坐标。
[0128]
实测数据结果证明,本发明能有效的通过冰上加速度计定位冰下声源位置。
[0129]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。