1.本发明为一种新型环保水处理自动装置,涉及自主保持游泳池中水质洁净度的游泳池潜浮式自动航行吸污装置,可以充水潜入游泳池池底并自动航行,通过水泵将絮凝沉淀在游泳池底部的体屑(皴)及食物残渣等污物吸入本装置内,经过滤网过滤后再排出,以达到清洁游泳池水质、节约宝贵水资源、降低游泳馆运营成本的目的。
背景技术:
2.游泳者游泳时身上掉下来的皮屑,口腔里的食物碎屑以及衣服的纤维头及毛发等,随着水流的运动会在水中絮凝,悬浮后沉积在泳池底,如不能及时清理不但污染游泳池水质,游泳者看到会感到很不舒服影响游泳体验;也有可能引发不必要公共卫生事件,所以及时、快速的清除掉游泳池中这些絮凝污染物是十分必要的。
3.目前我们还采用消毒和定期换水来保证游泳池里的水质。在未换水期间会在早上开馆前对大块的沉积污染物进行人工打捞清洁,但是深水区就很不方便,而游泳池中间位置就更不方便打捞;也或者用水泵抽吸,并将其排入下水道,不但浪费水资源,同样存在深水区和游泳池中间的区间不方便清理的问题。清理人员站游泳池四周人工打捞的作业方式,费时费力效率低下。水泵抽吸的方法,虽然效率有所提高,也一样存在无法打捞区间,还有时间限制,且这种方法会浪费水资源。而游泳池潜浮式自动航行吸污装置利用电池电力,充水潜入泳池池底自动航行,通过水泵将絮凝的体屑(皴)及食物残渣等污物吸入,经过滤网过滤后再排出,以达到清洁游泳池水质的目的。本装置自动避开游泳者和游泳池墙壁,工作效率高,省时省力,清洁游泳池效果好,能更好的保障游泳池水体水质的目的,工作效率高,省时省力清洁游泳池效果好,能更好的保障游泳馆水质。
技术实现要素:
4.游泳池潜浮式自动航行吸污装置主体用工程塑料做成的圆柱形空腔结构,圆柱形结构是为了防止工作中装置棱角划伤游泳者。在圆柱体内设有注水配重仓、可充电电池、直流水泵、程序控制器、电磁阀、电动阀门、单向阀、若干超声波传感器、浸水传感器、可拆卸滤网、双排水口、三通管、防水隔离板等。
5.游泳池潜浮式自动航行吸污装置,设有注水配重仓,调节配重仓里的配重物到合适重量,在程序控制器打开或关闭不同的电磁阀,并通过直流水泵向注水配重仓注水或者排水,能使本装置完成沉入泳池底部或者上浮水面的动作。在游泳池潜浮式自动航行吸污装置主体圆柱形结构四周及上下两面设有若干超声波传感器,超声波传感器将信号传输给程序控制器,用来判断是否悬浮在游泳池池底或者测量与游泳池四壁距离,防止工作时与墙壁碰撞;上面的超声波传感器是为了避免上浮时与游泳者发生碰撞。
6.程序控制器是由工业单片机设计而成,软件先完成对充电电池电压的检测,判断是否欠电上浮还是进行清理吸污工作;当测得电池能量足够后,通过浸水传感器判断本装置是否处在水中,如果不是则本装置处于准备状态,如果已经放在游泳池水中,则通过程序
控制直流水泵,在多个电磁阀通断配合下,让直流水泵完成水箱注水或者排水、完成本装置的下潜和上浮动作;程序控制器软件检测本装置底部超声波传感器信号判断是否下浮到底,关掉直流水泵完成水箱注水的电磁阀,然后采用直流水泵大流量吸水经过可拆卸滤网完成将絮凝的体屑(皴)及食物残渣等污物吸入经过滤网过滤后再排出,以达到清洁游泳池水质动作;同时大流量清洁后的水经双排水口排出,利用流体喷射原理驱动本装置在水下航行;程序控制器控制双排水管路中的每个电动阀门的开合度,当本装置侧面传感器感知有障碍物如泳池四壁或潜水的游泳者时,会改变双排水口中和传感器相对应的那一路电动阀门的开合度,从而改变这管路中水的流量变化,当改变的一路流量大于另一路时,本装置会向另一路方向转向,反之亦然,这样不用方向舵就可以完成本装置转向动作。当两路双排水口的排水流量(电动阀门的开合度相等)相同时,本装置可以直线潜行。本装置航行路线可规划也可随机进行。游泳池潜浮式自动航行吸污装置中单向阀的作用是防止吸入的污物倒流保证吸附效率。可拆卸滤网由工业滤布制成,当可拆卸滤网吸附污物较多时,在上浮充电时,能卸下来清洗。本装置中直流水泵选用低于36v直流大功率电机,防止电压过高对游泳者的造成不适或者电击伤害;可充电电池为直流电机,程序控制器,电磁阀,电动阀门及传感器提供电力。可充电电池安时数要足够大,并在具有过充过放保护功能并可拆卸。由于是水下工作,各个仓室和电路,元器件都做防水密封处理。
附图说明
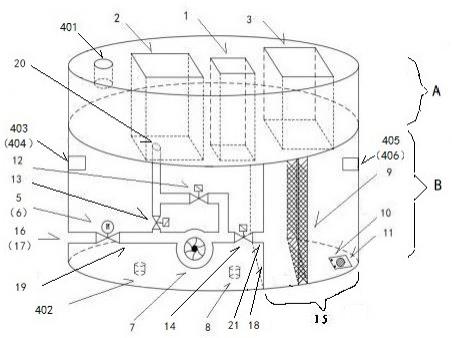
7.图1为游泳池潜浮式自动航行吸污装置侧视结构示意图;图2为游泳池潜浮式自动航行吸污装置空腔结构下部分b俯视结构示意图。
8.图中,a.空腔结构上部分; b.空腔结构下部分;1.程序控制器仓;2.注水配重仓;3.可充电电池仓;401.超声波传感器ⅰ;402.超声波传感器ⅱ;403.超声波传感器ⅲ;404.超声波传感器ⅳ;405.超声波传感器
ⅴ
;406.超声波传感器ⅵ;5.电动阀门ⅰ;6.电动阀门ⅱ;7.直流水泵;8.浸水传感器;9.可拆卸滤网;10.单向阀;11.吸污口;12.电磁阀ⅰ;13.电磁阀ⅱ;14.电磁阀ⅲ;15.过滤仓;16.排水口ⅰ;17.排水口ⅱ;18.防水隔离板;19.三通管;20.进水口;21.孔。
具体实施方式
9.游泳池潜浮式自动航行吸污装置主体用工程塑料做成的圆柱形空腔结构,圆柱形结构是为了防止工作中本装置棱角划伤游泳者,其特征是:在圆柱体内设有程序控制器仓、注水配重仓、可充电电池仓、直流水泵、电磁阀、电动阀门、单向阀、超声波传感器、浸水传感器、可拆卸滤网、排水口、三通管、防水隔离板;在程序控制器控制多个电磁阀和电动阀门的闭合与断开的不同组合,由一台直流水泵完成游泳池潜浮式自动航行吸污装置的下潜和上浮及水下自主航行、吸污作业;超声波传感器为本装置的程序控制器提供游泳者或游泳池四壁障碍信号,从而使本装置做出规避动作;吸污作业后,脏的过滤网可拆卸清洗;可充电电池为直流电机,程序控制器,电磁阀,电动阀门及传感器提供电力;采用工程塑料做成的圆柱形空腔结构,圆柱形空腔结构分为空腔结构上部分a和空腔结构下部分b;空腔结构上部分a并排设有三个独立仓盒,仓盒分别是程序控制器仓1、注水配重仓2、可充电电池仓3;程序控制器仓1内安装有工业单片机及设置有传感器输入接口和驱动输出接口的电路及软
件构成;注水配重仓2为本装置下潜和上浮的水配重仓,在仓的底部设有一个进水口20,通过水管与电磁阀ⅰ12一端,电磁阀ⅱ13一端连接在一起;可充电电池仓3是可充电电池放置仓,可充电电池仓3内的可充电电池也通过导线与程序控制器仓1中电路的相应端口相连;可充电电池同时为直流电机,程序控制器、电磁阀、电动阀门及传感器提供电力;程序控制器仓1、注水配重仓2、可充电电池仓3都设有可打开仓盖,方便打开检修或更换;在空腔结构上部分a上表面还设有一个超声波传感器ⅰ401,并通过导线与程序控制器仓1中电路的相对应端口相连;在空腔结构下部分b设有过滤仓15,过滤仓15与空腔结构上部分a和空腔结构下部分b有防水隔离板18;防水隔离板18开有一个孔21,通过水管与电磁阀ⅲ14的一端相连;在过滤仓15内安装有可拆卸滤网9,在直流水泵7吸水过程中完成对水中污物的过滤吸附作用;在过滤仓15下表面开有一个吸污口11,吸污口11下表面外界相通,在吸污口11上表面安装一个单向阀10,其作用是防止本装置上浮时吸附在可拆卸滤网9的污物反流;直流水泵7安装固定在空腔结构下部分b中,与过滤仓15有防水隔离板18隔离;直流水泵7通过导线与程序控制器仓1中电路的相对应端口相连;程序控制器仓1中电路相对应的输出端口控制直流水泵7的启动与停止;直流水泵7吸水口与电磁阀ⅰ12的一端、电磁阀ⅲ14一端通过水管连接在一起;电磁阀ⅲ14另一端通过水管连接过滤仓15开孔处;电磁阀ⅰ12另一端通过水管与注水配重仓2、进水口20及电磁阀ⅱ13的一端相连接;电磁阀ⅱ13的另一端通过水管与直流水泵7出水口、三通管19的一端相连通;三通管19的另两端分别接电动阀门ⅰ5、电动阀门ⅱ6的一端;电动阀门ⅰ5、电动阀门ⅱ6的另一端分别接排水口ⅰ16、排水口ⅱ17;排水口ⅰ16、排水口ⅱ17通过水管伸出本装置空腔结构下部分b外壳;电动阀门ⅰ5及电动阀门ⅱ6对称安装于本装置空腔结构下部分b中轴线两侧,并且保证是重心的两侧;在空腔结构下部分b下底面外安装有一个浸水传感器8,并通过导线与程序控制器仓1中电路的相对应端口相连,其作用是检测本装置是否被放入水中,防止本装置空运行;在空腔结构下部分b下底面外还安装有一个超声波传感器ⅱ402,并通过导线与程序控制器仓1中电路的相对应端口相连,其作用是检测本装置是否下潜到游泳池底部;见图1;本装置需要下潜时,程序控制器仓1内工业单片机先判断浸水传感器8送来的浸水信号,控制直流水泵7的启动,程序控制器仓1内工业单片机通过相对应的输出接口电路控制电磁阀ⅱ13、电磁阀ⅲ14得电打开,电动阀门ⅰ5、电动阀门ⅱ6、电磁阀ⅰ12失电关闭,水经过过滤仓15中的吸污口11、单向阀10、防水隔离板18上的孔21、电磁阀ⅲ14、经直流水泵7吸水排水、电磁阀ⅱ13、进水口20、被注入注水配重仓2中;注水配重仓2重量增加,本装置完成下潜动作;当空腔结构下部分b超声波传感器ⅱ402向程序控制器仓1内工业单片机发出停止信号后,本装置将悬浮在游泳池底面一定高度,并自动转入自动巡航模式;随后程序控制器仓1内工业单片机通过相对应的输出接口电路控制电磁阀ⅰ12关闭、电磁阀ⅱ13关闭、电磁阀ⅲ14得电打开,电动阀门ⅰ5、电动阀门ⅱ6得电打开,游泳池底部絮凝的体屑(皴)及食物残渣等污物被直流水泵7吸入,水经过过滤仓15中的吸污口11、单向阀10、可拆卸滤网9、防水隔离板18上的孔21、电磁阀ⅲ14、直流水泵7、经三通管19分别流经电动阀门ⅰ5、电动阀门ⅱ6、排水口ⅰ16、排水口ⅱ17后再次排入泳池中;水中絮凝的体屑(皴)及食物残渣等经过可拆卸滤网9后,被吸附在可拆卸滤网9上;可拆卸滤网9由工业滤布制成,当可拆卸滤网吸附污物较多时,在上浮充电时,卸下来清洗;在空腔结构下部分b外表面四周分90
°
安装四个超声波传感器ⅲ403、超声波传感器ⅳ404、超声波传感器
ⅴ
405、超声波传感器ⅵ406,见图2;这四个超声波传感器都通过导线与程序控制
器1中电路的相对应端口相连,其作用检测本装置四周是否有墙壁和潜水者,防止本装置与游泳池四壁和潜水者发生碰撞;在本装置完成下潜动作并自动转入自动巡航模式后,程序控制器仓1内工业单片机根据空腔结构下部分b外表面四周分90
°
安装四个超声波传感器ⅲ403、超声波传感器ⅳ404、超声波传感器
ⅴ
405和超声波传感器ⅵ406的数据,分别调节电动阀门ⅰ5、电动阀门ⅱ6开合度,使流经排水口ⅰ16、排水口ⅱ17水流量相等或不等从而完成水底直线巡航或转向动作;当本装置侧面超声波传感器ⅲ403或超声波传感器ⅳ404或超声波传感器
ⅴ
405或超声波传感器ⅵ406感知有障碍物,如泳池四壁或潜水的游泳者时,会改变空腔结构下部分b外表面四周分90
°
安装四个超声波传感器相对应的那一路排水口相连接电动阀门的开合度,从而改变这条管路中水的流量,当改变的一路流量大于另一路时,本装置会向另一路方向转向,反之亦然,这样不用方向舵就完成本装置转向动作;当排水口ⅰ16、排水口ⅱ17的水流量(电动阀门的开合度相等)相同时,本装置完成在泳池底部直线潜行动作;无论是本装置转弯还是直线航行,直流水泵7一直有从游泳池吸水动作,完成自动航行吸污作业;当充电电池电量不足或者定时时间到,本装置需要上浮,程序控制器仓1内工业单片机通过相对应的输出接口电路控制直流水泵7启动、控制电磁阀ⅱ13、电磁阀ⅲ14失电关闭,电动阀门ⅰ5、电动阀门ⅱ6、电磁阀ⅰ12得电打开,注水配重仓2中的水经过进水口20、电磁阀ⅰ12、直流水泵7吸水口、直流水泵7排水口、三通管19、电动阀门ⅰ5、电动阀门ⅱ6、排水口ⅰ16、排水口ⅱ17被排入泳池中,注水配重仓2重量减轻,本装置完成上浮动作;本装置浮出水面后,空腔结构上部分a上表面超声波传感器ⅰ401向程序控制器仓1内工业单片机发出停止信号后,直流水泵7关闭、电磁阀ⅰ12、电磁阀ⅱ13、电磁阀ⅲ14失电关闭,本装置上浮动作结束,等待工作人员打捞。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
