技术特征:
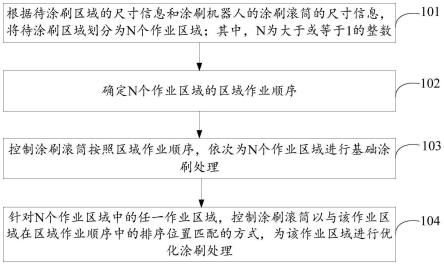
1.一种涂刷方法,其特征在于,包括:根据待涂刷区域的尺寸信息和涂刷机器人的涂刷滚筒的尺寸信息,将所述待涂刷区域划分为n个作业区域;其中,n为大于或等于1的整数;确定所述n个作业区域的区域作业顺序;控制所述涂刷滚筒按照所述区域作业顺序,依次为所述n个作业区域进行基础涂刷处理;针对所述n个作业区域中的任一作业区域,控制所述涂刷滚筒以与该作业区域在所述区域作业顺序中的排序位置匹配的方式,为该作业区域进行优化涂刷处理。2.根据权利要求1所述的方法,其特征在于,所述区域作业顺序根据所述n个作业区域沿所述待涂刷区域的宽度方向的排列顺序确定,若所述n个作业区域中的任一作业区域为第一作业区域,则:所述针对所述n个作业区域中的任一作业区域,控制所述涂刷滚筒以与该作业区域在所述区域作业顺序中的排序位置匹配的方式,为该作业区域进行优化涂刷处理,包括:若所述第一作业区域在所述区域作业顺序中的排序位置为首个位置,则控制所述涂刷滚筒进行所述第一作业区域的第一边缘的边缘抹匀涂刷处理;其中,所述第一边缘为所述第一作业区域远离第二作业区域的边缘,所述第二作业区域为所述区域作业顺序中与所述第一作业区域相邻的作业区域;若所述第一作业区域在所述区域作业顺序中的排序位置为非首个位置,则控制所述涂刷滚筒进行由所述第一作业区域至第三作业区域的回滚涂刷处理;其中,所述第三作业区域为所述区域作业顺序中排序位置在所述第一作业区域之前的作业区域。3.根据权利要求2所述的方法,其特征在于,所述控制所述涂刷滚筒进行所述第一作业区域的第一边缘的边缘抹匀涂刷处理,包括:在所述第一作业区域中确定首尾顺次相连且互不重叠的p条线段;其中,p为大于或等于2的整数,所述p条线段中的每条线段的一端位于所述待涂刷区域的顶部边缘,另一端位于所述待涂刷区域的底部边缘;根据所述p条线段,确定抹匀轨迹;其中,所述抹匀轨迹的结束点相对于起始点的方位,与所述第一作业区域的第一边缘相对于所述第一作业区域的方位匹配;控制所述涂刷滚筒按照所述抹匀轨迹,进行所述第一边缘的边缘抹匀涂刷处理。4.根据权利要求2所述的方法,其特征在于,所述控制所述涂刷滚筒进行由所述第一作业区域至第三作业区域的回滚涂刷处理,包括:在包括所述第一作业区域至所述第三作业区域的区域范围中,确定首尾顺次相连且互不重叠的q条线段;其中,q为大于或等于2的整数,所述q条线段中的每条线段的一端位于所述待涂刷区域的顶部边缘,另一端位于所述待涂刷区域的底部边缘;根据所述q条线段,确定回滚轨迹;其中,所述回滚轨迹的结束点相对于起始点的方位,与所述第三作业区域相对于所述第一作业区域的方位匹配;控制所述涂刷滚筒按照所述回滚轨迹,进行由所述第一作业区域至所述第三作业区域的回滚涂刷处理。5.根据权利要求1所述的方法,其特征在于,所述区域作业顺序根据所述n个作业区域沿所述待涂刷区域的宽度方向的排列顺序确定,若所述n个作业区域中的任一作业区域为
第四作业区域,则:所述控制所述涂刷滚筒按照所述区域作业顺序,依次为所述n个作业区域进行基础涂刷处理,包括:确定所述第四作业区域的中心线段与所述待涂刷区域的顶部边缘的第一相交点,以及所述中心线段与所述待涂刷区域的底部边缘的第二相交点;确定所述中心线段上与所述第二相交点的距离为第一预设距离的第一目标点,以及确定所述中心线段上与所述第一相交点的距离为所述第一预设距离的第二目标点;根据所述第一目标点和所述第一相交点,确定第一轨迹,以及根据所述第一相交点、所述第二目标点、所述第一目标点和所述第二相交点,确定第二轨迹;根据所述第一轨迹和所述第二轨迹,确定基础涂刷轨迹;控制所述涂刷滚筒按照所述基础涂刷轨迹,为所述第四作业区域进行基础涂刷处理。6.根据权利要求5所述的方法,其特征在于,所述第一轨迹的起始点为所述第一目标点,所述第一轨迹的结束点为所述第一相交点,且所述第一轨迹的结束点作为所述第二轨迹的起始点,所述第二轨迹包括在所述中心线段上的所有点;所述根据所述第一轨迹和所述第二轨迹,确定基础涂刷轨迹,包括:确定第三轨迹;其中,所述第三轨迹包括首尾顺次相连且互不重叠的m条线段,m为大于或等于2的整数,所述m条线段中的每条线段的一端位于所述待涂刷区域的顶部边缘,另一端位于所述待涂刷区域的底部边缘,所述第三轨迹的起始点相对于所述第二轨迹的结束点的方位,与第五作业区域相对于所述第四作业区域的方位匹配,所述第五作业区域为所述区域作业顺序中排序位置在所述第四作业区域之后的作业区域,所述第三轨迹的起始点与所述中心线段的距离小于第二预设距离;确定由所述第一轨迹、所述第二轨迹和所述第三轨迹组成的基础涂刷轨迹。7.根据权利要求6所述的方法,其特征在于,在控制所述涂刷滚筒沿所述第一轨迹进行基础涂刷处理的过程中,所述涂刷滚筒的涂刷作用力的变化规律为:先由0线性变化为第一预设作用力,在维持所述第一预设作用力预设时长后,由所述第一预设作用力线性变化为0;在控制所述涂刷滚筒沿所述第二轨迹进行基础涂刷处理的过程中,所述涂刷滚筒的涂刷作用力保持为第二预设作用力,所述第二预设作用力大于所述第一预设作用力;在控制所述涂刷滚筒沿所述第三轨迹进行基础涂刷处理的过程中,所述涂刷滚筒的涂刷作用力保持为第三预设作用力,所述第三预设作用力小于所述第一预设作用力。8.根据权利要求6所述的方法,其特征在于,所述第二轨迹包括:连接所述第一目标点和所述第二相交点的r条线段;连接所述第二目标点和所述第一相交点的s条线段;其中,r和s均为大于或等于2的整数。9.根据权利要求1所述的方法,其特征在于,所述方法还包括:获取所述涂刷机器人的滚筒连接杆相对于所述涂刷滚筒的方位;确定与所获取的方位匹配的第一旋转方向;在控制所述涂刷滚筒进行所述基础涂刷处理和所述优化涂刷处理的过程中,控制所述涂刷滚筒以第一姿态进行涂刷作业;其中,所述第一姿态为相对于第二姿态,按所述第一旋
转方向进行旋转后的姿态,所述第二姿态为所述涂刷滚筒的轴线平行于所述待涂刷区域的姿态。10.一种涂刷装置,其特征在于,包括:划分模块,用于根据待涂刷区域的尺寸信息和涂刷机器人的涂刷滚筒的尺寸信息,将所述待涂刷区域划分为n个作业区域;其中,n为大于或等于1的整数;第一确定模块,用于确定所述n个作业区域的区域作业顺序;第一控制模块,用于控制所述涂刷滚筒按照所述区域作业顺序,依次为所述n个作业区域进行基础涂刷处理;第二控制模块,用于针对所述n个作业区域中的任一作业区域,控制所述涂刷滚筒以与该作业区域在所述区域作业顺序中的排序位置匹配的方式,为该作业区域进行优化涂刷处理。
技术总结
本公开的实施例公开了一种涂刷方法及装置。该方法包括:根据待涂刷区域的尺寸信息和涂刷机器人的涂刷滚筒的尺寸信息,将待涂刷区域划分为N个作业区域;其中,N为大于或等于1的整数;确定N个作业区域的区域作业顺序;控制涂刷滚筒按照区域作业顺序,依次为N个作业区域进行基础涂刷处理;针对N个作业区域中的任一作业区域,控制涂刷滚筒以与该作业区域在区域作业顺序中的排序位置匹配的方式,为该作业区域进行优化涂刷处理。本公开的实施例能够通过涂刷机器人,高效可靠地实现待涂刷区域的涂刷处理,整个过程不需要大量的人工参与,涂刷处理效率能够得到提升,从而更好地满足实际需求。求。求。
技术研发人员:李佳澍
受保护的技术使用者:如你所视(北京)科技有限公司
技术研发日:2022.07.21
技术公布日:2022/10/24
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。